


En robot med et fast, men blidt greb
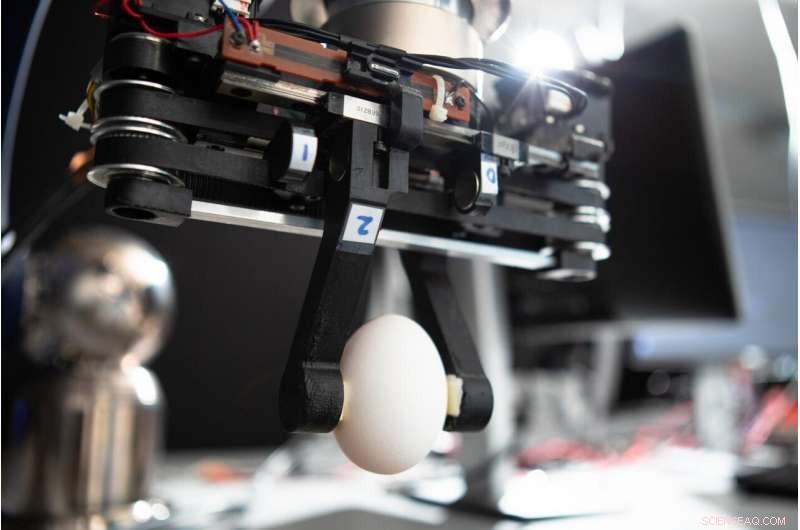
En robotgreb udviklet i laboratoriet ved University of Buffalo -ingeniøren Ehsan Esfahani bruger frastødning mellem magneter til at justere stivheden i dens greb, forbedring af sikkerheden. Kredit:Douglas Levere/University at Buffalo
Menneskelige hænder er bemærkelsesværdigt dygtige til at manipulere en række objekter. Vi kan hente et æg eller et jordbær uden at smadre det. Vi kan hamre et søm.
En egenskab, der giver os mulighed for at udføre en række opgaver, er evnen til at ændre fastheden i vores greb, og University at Buffalo ingeniører har udviklet en tofingret robothånd, der deler denne egenskab.
Robothåndens design gør det muligt at absorbere energi fra stød under kollisioner. Dette forhindrer, hvad robotten holder i, i at gå i stykker, og gør det også mere sikkert for mennesker at arbejde med og i nærheden af maskinerne.
Sådanne gribere ville være et værdifuldt aktiv for menneske-robot partnerskab i samlebånd i bilindustrien, elektronisk emballage og andre industrier, siger Ehsan Esfahani, Ph.d., lektor i mekanik og rumfartsteknik på UB School of Engineering and Applied Sciences.
"Vores robotgriber efterligner den menneskelige hånds evne til at justere stivheden i grebet. Disse griber er designet til kollaborative robotter, der arbejder sammen med mennesker, "Siger Esfahani." De kommer til at være hjælpere, så de skal være sikre, og gripere med variabel stivhed hjælper med at nå det mål. "
En ny undersøgelse offentliggjort online den 10. september i IEEE -transaktioner på industriel elektronik fremhæver enhedens sikre design, herunder gennem eksperimenter, der viser, hvordan griberens stødabsorberende træk holder en spaghettipind i stykker under en kollision.
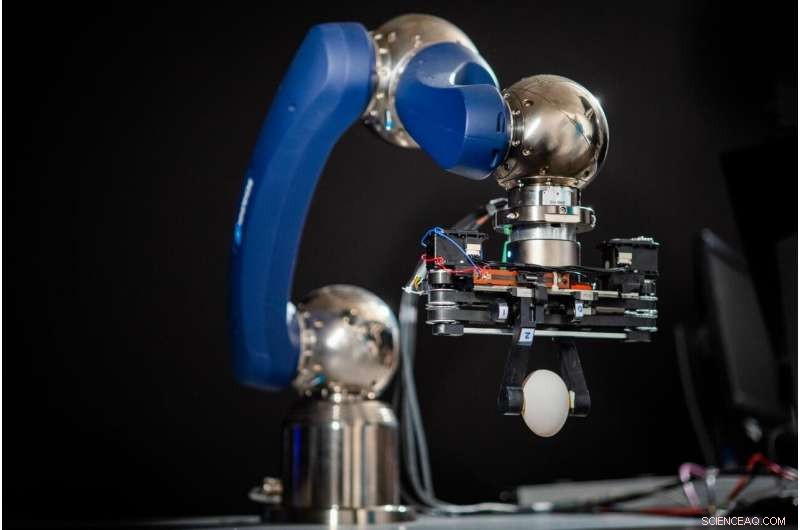
En robotgreb udviklet i laboratoriet på University of Buffalo -ingeniøren Ehsan Esfahani. Griberen er fastgjort til en kommercielt tilgængelig robotarm. Kredit:Douglas Levere/University at Buffalo
Magneter giver denne robot et blødt touch
Esfahani forklarer, at magneter er hemmeligheden bag den robotgribers alsidighed.
I stedet for at have to fingre, der er fastgjort på plads, hver af griberens fingre har en magnetisk base, der sidder mellem to neodymmagneter, der afviser, eller skubbe imod, fingeren.
Luftgabet mellem magneterne virker som en fjeder, skaber et lille give, når hånden opfanger et objekt eller støder sammen med en ekstern kraft. Grebets stivhed kan også justeres ved at øge eller reducere mellemrummet mellem magneter.
I det nye papir, Esfahani og Amirhossein Memar, en tidligere UB Ph.D. kandidat i mekanik og rumfartsteknik, rapportere om disse sikkerhedsfunktioner.
I et sæt tests, ingeniørerne placerede en kort stav spaghetti på langs mellem fingrene på den robotiske hånd. Da griberen styrtede ind i en fast genstand, enheden registrerede den eksterne kraft, der blev anvendt, hvilket fik magneterne til at justere deres position, midlertidigt reducere stivheden i grebet og tillade griberen at absorbere noget af energien fra kollisionen.
Slutresultatet? Spaghetti -pinden blev i ét stykke.
Næste trin i udviklingen
Esfahani bemærker, at griberen, hans team udvikler, kan fastgøres til kommercielt tilgængelige robotarme, der allerede er i brug på mange faciliteter. Dette kan sænke omkostningerne ved at tilpasse teknologien til virksomheder, der er interesseret i at forbedre sikkerheden og kapaciteterne på eksisterende maskiner.
Esfahani lancerer et opstartsfirma til kommercialisering af griberen, licenseringsteknologi fra UB.
Hans team har modtaget $ 55, 000 fra Buffalo Fund:Accelerator - finansieret af Innovation Hub, som administreres af UB og understøttes af Empire State Development - for at videreudvikle den robotiske hånd. Ud over at forfine griberens nuværende design, holdet kan også undersøge fremskridt såsom tilføjelse af en tredje finger.
Forskere, der har været involveret i at designe og teste griberen, omfatter ph.d. studerende Sri Sadhan Jujjavarapu og Memar, medforfatter på det nye spaghetti stick-studie, der har modtaget sin ph.d. fra UB og er nu postdoktoral forsker ved Facebook Reality Labs.
 Varme artikler
Varme artikler
-
 En persons glasaffald bliver en andens skatKredit:University of Queensland I et forsøg på at bevare verdens næstmest anvendte naturressource - sand - University of Queensland Ph.D. kandidat danske Kazmi har udviklet en bæredygtig løsning,
En persons glasaffald bliver en andens skatKredit:University of Queensland I et forsøg på at bevare verdens næstmest anvendte naturressource - sand - University of Queensland Ph.D. kandidat danske Kazmi har udviklet en bæredygtig løsning, -
 Kirigami inspirerer til ny metode til bærbare sensorerVed hjælp af kirigami til at skære og folde grafen kan bærbare sensorer bedre tilpasses kroppens naturlige bevægelse. Kredit:University of Illinois i Urbana-Champaign Department of Mechanical Science
Kirigami inspirerer til ny metode til bærbare sensorerVed hjælp af kirigami til at skære og folde grafen kan bærbare sensorer bedre tilpasses kroppens naturlige bevægelse. Kredit:University of Illinois i Urbana-Champaign Department of Mechanical Science -
 Fremtiden for sociale medier:Hvad vi kan lære af, hvorfor folk forlader FacebookKredit:NeONBRAND/Unsplash, FAL Antallet af aktive brugere af Facebook (de mennesker, der har logget ind på webstedet i den foregående måned) har nået et historisk højdepunkt på 2,45 mia. For at sæ
Fremtiden for sociale medier:Hvad vi kan lære af, hvorfor folk forlader FacebookKredit:NeONBRAND/Unsplash, FAL Antallet af aktive brugere af Facebook (de mennesker, der har logget ind på webstedet i den foregående måned) har nået et historisk højdepunkt på 2,45 mia. For at sæ -
 Bodybags, rotter, spild:Katastrofereaktion henvender sig til VR for grum træningPolitiet i Thailand tester et nyt VR -spil som en del af træning i katastrofeberedskab En thailandske politimand trasker gennem affald og ødelagte bygninger på udkig efter lig - men hun mangler ku
Bodybags, rotter, spild:Katastrofereaktion henvender sig til VR for grum træningPolitiet i Thailand tester et nyt VR -spil som en del af træning i katastrofeberedskab En thailandske politimand trasker gennem affald og ødelagte bygninger på udkig efter lig - men hun mangler ku
- Hackere retter sig mod ejendomshandler, med ødelæggende virkning
- Hvilken hormon er ansvarlig for at genoprette homøostasis?
- At rette byers vandkrise kan sende vores klimamål ned i gurgleren
- Hvilke fjender har vaskebjørne?
- Klimaændringer kan føre til større atmosfæriske floder
- Kroger ruller ud uden fører til levering af dagligvarer (opdatering)