


Clingfish biologi inspirerer til bedre sugekop
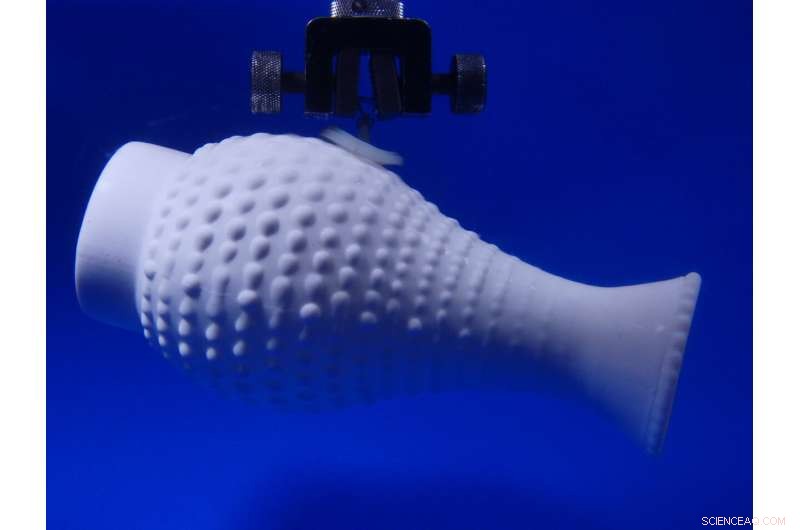
De udviklede sugekop er i stand til at løfte ujævne genstande. Den løfter også mange gange sin vægt ind og ud af vandet. Kredit:University of California San Diego
Et team af ingeniører og havbiologer byggede en bedre sugekop inspireret af mekanismen, der tillader klyngefisken at klæbe til både glatte og ru overflader, såsom sten i området, hvor tidevandet kommer og går.
Forskere reverse engineering af clingfish's sugeskive og udviklet enheder, der klæber godt til våde og tørre genstande både i og uden for vandet. Enhederne kan holde op til hundredvis af gange deres egen vægt. De kan bruges i en bred vifte af applikationer fra håndtering og emballering til produkter, til robotgribere i produktionen, til genvinding af arkæologiske artefakter.
University of California San Diego-teamet præsenterer deres resultater i et nyligt nummer af tidsskriftet Bioinspiration og biomimetik .
Det overordnede mål med projektet var at udvikle en ny teknologi, der er i stand til at give et delikat greb til at håndtere skrøbelige genstande. Undersøgelsen fremhæver vigtigheden af biomimik, som gør det muligt for forskere på tværs af discipliner fra teknik til biologi at arbejde sammen og hente inspiration fra naturen til at udvikle nye teknologier.
"Jeg har altid været fascineret af naturen, og specifikt de indviklede og direkte fascinerende designs, der har udviklet sig, og som kan gøre, hvad moderne teknologi ikke kan, " sagde Jessica Sandoval, en ph.d. studerende ved UC San Diego Jacobs School of Engineering og hovedforfatter af undersøgelsen. "Dette var en perfekt mulighed for at komme til at studere adhæsionsmekanismen i disse clingfish og adressere, hvordan teknologien bag adhæsion fra sugekopper kan forbedres."
Forbedring af sugekopper gennem biomimik
Clingfish er små fisk, der er udbredt i tropiske og tempererede egne. De er almindelige i tidevandsområder, hvor de bruger deres kraftfulde sugeevne til at klæbe til sten, alger, og søgræs. De kan forblive fast på disse overflader, selv i kraftige strømme og når de bliver ramt af bølger. Klingfisken brugt i denne undersøgelse var en art hjemmehørende på vestkysten, og blev indsamlet lige ved San Diego.
Ved at studere klyngefisken de samlede, Sandoval og kolleger fandt ud af, at hemmeligheden, der efterlignede fastgørelsesmekanismen, som dyret bruger, var at inkorporere et blødt lag og slidser i de kunstige sugekopper. Klippefiskens sugeskive er foret med rækker af sekskantede strukturer, kaldet papiller, som er dækket af mikroskopiske fibre. Forskere efterlignede dette inde i deres prototyper med et blødt lag lavet af silikone. Dette lag forbedrede den klæbende ydeevne dramatisk på ru overflader. Holdet inkorporerede også slidser i sugekoppens kammer, som sikrer bedre vedhæftning til uregelmæssige, konkave overflader.
"Da jeg først talte med mine ingeniørkolleger, Jeg var sikker på, at tricket til at optimere sugekoppen ville komme fra biologien, " sagde studiemedforfatter Dimitri Deheyn, en forsker i havbiologi og biomimik ved Scripps Institution of Oceanography ved UC San Diego. "Jeg var også sikker på, at en bedre sugekop ville kombinere en unik designarkitektur og en 3-D, alsidig mekanisme af en slags."
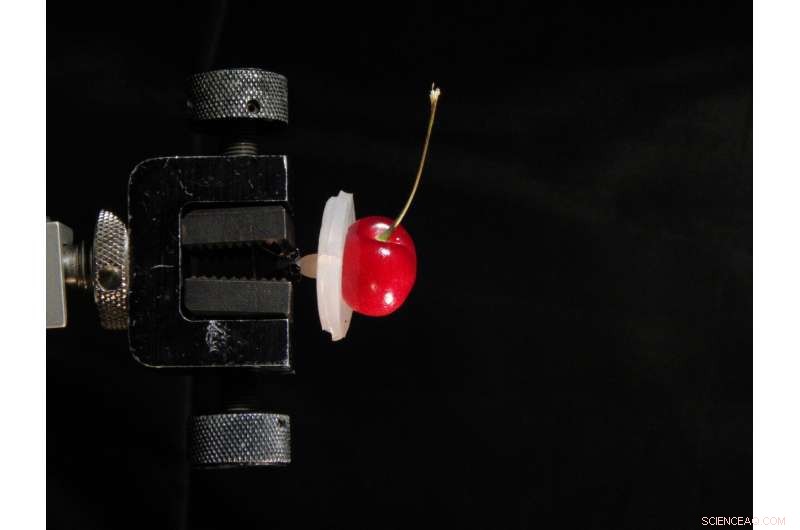
Sugekoppen kan løfte skrøbelige genstande, såsom dette kirsebær, uden at knuse dem. Kredit:University of California San Diego
Sugekop ydeevne
De kunstige sugeskiver, forskere udviklede, var i stand til at holde sig til ru overflader, såsom groft sandpapir, og til meget varierende overflader, fra sten til grøntsager, både i og uden for vandet. Forskere viste også, at deres enheder kunne opfange alt fra kirsebær og jordbær uden at smadre dem, at udarbejde konkylie og vaser.
"Mange klæbemidler hæfter kun godt til enten en tør eller våd overflade og har vanskeligheder med ru overflader, " sagde studiemedforfatter Mike Tolley, en robotekspert og professor ved Jacobs School of Engineering ved UC San Diego. "Vores enheder kan det hele."
Enhederne kan holde på en tung genstand i over seks timer, som forskerne mener kan udvides til længere perioder. Ud over, disse clingfish-inspirerede sugeskiver har et imponerende greb givet deres størrelse:en sugeskive kan understøtte op til 350 gange sin egen vægt, mens den er suspenderet i luften.
Forskerne udstyrede endda armen på et Remotely Operated Vehicle (ROV) med en af deres enheder og viste, at den kunne manipulere et råt æg uden at knække det.
"Denne specifikke ROV-applikation er af særlig interesse for mig, " sagde Sandoval, der er en deep sea ROV pilot udover at være ph.d. studerende. "Mens man piloterer ROV'er, Jeg bruger undersøiske manipulatorer for at genvinde sarte prøver fra havbunden. Jeg ville ofte ønske, at jeg havde et værktøj til et delikat greb, der komplementerer det kraftfulde greb i manipulatorens metalliske kæber. Mit arbejde i det dybe hav var en sand motivation bag at se til naturen for at få inspiration til adhæsion."
Eksperimenter og analyser
Klingfiskene blev samlet ved tidevandsbassinerne lige nord for Ellen Browning Scripps Pier. En del af Scripps Coastal Marine Reserve, forskere ved UC San Diego kan erhverve licenser til at indsamle organismer til videnskabelige formål fra dette område, gør det til et unikt aktiv for universitetet.
Mens man bygger clingfish-inspirerede sugeskiver, holdet eksperimenterede også med at efterligne klingfiskens mikroskopiske fibre ved at belægge fodaftrykket af den kunstige sugeskive med et lag mikroskopiske søjler lavet af silikone. Interessant nok, de fandt ud af, at de enklere designs, der kun bestod af et tykt lag silikone, klarede sig bedre end designs med mikroskopiske søjler.
Det tværfaglige team analyserede ydeevnen af de clingfish-inspirerede kunstige sugeskiver. Forskerne karakteriserede overfladekontakten af diskenes fodaftryk for at se, hvordan de interagerer med en overflade. De søgte at forstå den underliggende energetik ved at bruge Finite Element Analysis til at modellere processen med deformation af sugeskiverne. De udførte også test af klæbestyrke på forskellige overfladekrumninger og forskellige overfladeruheder, lige fra glat akryl til groft sandpapir. De testede mængden af kraft, der var nødvendig for at fastgøre skiven til en overflade, afhængig af overfladens ruhed. De fandt ud af, at der skulle meget lidt kraft til for at fastgøre skiverne til en overflade, hvilket forklarer enhedernes evne til at håndtere sarte genstande.
 Varme artikler
Varme artikler
-
 Ingeniører lærer en drone at flokke fugle væk fra lufthavne autonomtKredit:Soon-Jo Chung/Caltech Ingeniører hos Caltech har udviklet en ny kontrolalgoritme, der gør det muligt for en enkelt drone at flokke en hel flok fugle væk fra luftrummet i en lufthavn. Algori
Ingeniører lærer en drone at flokke fugle væk fra lufthavne autonomtKredit:Soon-Jo Chung/Caltech Ingeniører hos Caltech har udviklet en ny kontrolalgoritme, der gør det muligt for en enkelt drone at flokke en hel flok fugle væk fra luftrummet i en lufthavn. Algori -
 Darth Vader-hjelm blandt Hollywood-skatte på $10 mio. auktionDarth Vaders hjelm fra filmen The Empire Strikes Back kan indbringe næsten en halv million dollars på auktion Darth Vaders hjelm fra The Empire Strikes Back er blandt en stor samling af eftertragt
Darth Vader-hjelm blandt Hollywood-skatte på $10 mio. auktionDarth Vaders hjelm fra filmen The Empire Strikes Back kan indbringe næsten en halv million dollars på auktion Darth Vaders hjelm fra The Empire Strikes Back er blandt en stor samling af eftertragt -
 Infrarødt kamera for at sikre højkvalitets 3D-reproducerbarhed af deleDen avancerede fotonkilde genererer højenergi røntgenstråler, der viser 3-D-print i næsten realtid. Kredit:Argonne National Laboratory Tilføjelsen af et nyt infrarødt kamera på Argonnes Advanced
Infrarødt kamera for at sikre højkvalitets 3D-reproducerbarhed af deleDen avancerede fotonkilde genererer højenergi røntgenstråler, der viser 3-D-print i næsten realtid. Kredit:Argonne National Laboratory Tilføjelsen af et nyt infrarødt kamera på Argonnes Advanced -
 Google droneleverancer godkendt til start i AustralienDet Google-linkede dronefirma Wing har prøvet droneleverancer i de sidste 18 måneder, men vil nu kunne gå videre på fuld tid Et Google-tilknyttet firma vil begynde at levere takeaways og andre små
Google droneleverancer godkendt til start i AustralienDet Google-linkede dronefirma Wing har prøvet droneleverancer i de sidste 18 måneder, men vil nu kunne gå videre på fuld tid Et Google-tilknyttet firma vil begynde at levere takeaways og andre små
- En 3-punkts plan for at nå netto-nul-emissioner i 2050
- Ødelagt gammelt tempel nu åbent for virtuel udforskning
- Fisk kan bruge forskellig adfærd for at beskytte mod parasitter
- En ny teknik til fremstilling af 2D-transistorer fra tofasede TMD-krystaller
- Generering af elektrisk strøm fra spildvarme
- Disco-aftener? Rocket Lab sender en glitrende sfære i kredsløb