


Ingeniører lærer en drone at flokke fugle væk fra lufthavne autonomt

Kredit:Soon-Jo Chung/Caltech
Ingeniører hos Caltech har udviklet en ny kontrolalgoritme, der gør det muligt for en enkelt drone at flokke en hel flok fugle væk fra luftrummet i en lufthavn. Algoritmen præsenteres i en undersøgelse i IEEE-transaktioner på robotteknologi .
Projektet var inspireret af 2009 "Miracle on the Hudson, "da US Airways Flight 1549 ramte en flok gæs kort efter start og piloter Chesley Sullenberger og Jeffrey Skiles blev tvunget til at lande i Hudson River ud for Manhattan.
"Passagererne på Flight 1549 blev kun reddet, fordi piloterne var så dygtige, " siger Soon-Jo Chung, en lektor i rumfart og Bren Scholar i afdelingen for ingeniørvidenskab og anvendt videnskab samt en JPL-forsker, og hovedefterforskeren på dronehyrdeprojektet. "Det fik mig til at tænke på, at næste gang måske ikke ville have sådan en lykkelig slutning. Så jeg begyndte at undersøge måder at beskytte luftrummet mod fugle ved at udnytte mine forskningsområder inden for autonomi og robotteknologi."
Nuværende strategier til at kontrollere luftrummet omfatter ændring af det omgivende miljø for at gøre det mindre attraktivt for fugle, bruge trænede falke til at skræmme flokke væk, eller endda styre en drone for at skræmme fuglene. Disse strategier kan være dyre eller - i tilfælde af den håndpiloterede drone - upålidelige, siger Chung, der er forsker ved Caltechs Center for Autonome Systemer og Teknologier.
"Når hyrde fugle væk fra et luftrum, du skal være meget forsigtig med, hvordan du placerer din drone. Hvis det er for langt væk, det vil ikke flytte flokken. Og hvis det kommer for tæt på, du risikerer at sprede flokken og gøre den fuldstændig ukontrollerbar. Det er svært at gøre med en piloteret drone."
Herding er afhængig af evnen til at styre en flok som en enkelt, indeholdt entitet - holder den sammen, mens den skifter dens kørselsretning. Hver fugl i en flok reagerer på ændringer i adfærden hos de fugle, der er nærmest den. Effektiv besætning kræver en ekstern trussel - i dette tilfælde dronen - at placere sig selv på en sådan måde, at den tilskynder fugle langs kanten af en flok til at foretage kursændringer, der så påvirker fuglene nærmest dem, som påvirker fugle længere inde i flokken, og så videre, indtil hele flokken skifter kurs. Placeringen skal være præcis, dog:hvis den ydre trussel bliver for ivrig og skynder sig mod flokken, fuglene vil gå i panik og handle individuelt, ikke kollektivt.
I 2013 mens han var adjunkt ved University of Illinois i Urbana-Champaign, Chung modtog en National Science Foundation CAREER Award for at tackle problemet. Oprindeligt, Chung havde til hensigt at bygge en selv-guidet, blafrende robot, hvis flyvning ville efterligne en falk, at regne med, at det bioinspirerede design ville gøre det endnu mere effektivt til at kontrollere flokke ved at præsentere dem for en naturlig tilsyneladende trussel. Mens arbejdet i den retning gav en helt ny dronestil - "Bat Bot", som Chung afslørede i 2017 - fandt han ud af, at en off-the-shelf quadrotor drone var lige så effektiv til at hyrde fugle.
At lære dronen at besætte autonomt, Chung og hans kolleger, herunder Aditya Paranjape fra Imperial College London, en af hans tidligere kandidatstuderende, studeret og udledt en matematisk model for flokdynamik til at beskrive, hvordan flokke bygger og vedligeholder formationer, hvordan de reagerer på trusler langs kanten af flokken, og hvordan de så kommunikerer den trussel gennem flokken. Deres arbejde forbedrer algoritmer designet til at hyrde får, som kun behøvede at arbejde i to dimensioner, i stedet for tre.
"Vi studerede omhyggeligt flokkdynamik og interaktion mellem flokke og forfølgere for at udvikle en matematisk forsvarlig hyrdealgoritme, der sikrer sikker flytning af flokke ved hjælp af autonome droner, " siger Kyunam Kim, postdoc i rumfart ved Caltech og medforfatter til IEEE-oplægget.
Da de var i stand til at generere en matematisk beskrivelse af flokadfærd, forskerne reverse engineering det for at se præcis, hvordan nærgående eksterne trusler ville blive reageret på af flokke, og brugte derefter disse oplysninger til at oprette en ny hyrningsalgoritme, der producerer ideelle flyveveje for indkommende droner til at flytte flokken væk fra et beskyttet luftrum uden at sprede den.
"Min tidligere forskning fokuserede på rumfartøjer og dronesværme, hvilket viste sig at være overraskende relevant for dette projekt, " siger Chung.
Holdet testede algoritmen på en flok fugle nær et felt i Korea og fandt ud af, at en enkelt drone kunne holde en flok snesevis af fugle ude af et bestemt luftrum. Effektiviteten af algoritmen er kun begrænset af antallet og størrelsen af de indkommende fugle, Chung siger, tilføjer, at holdet planlægger at udforske måder at skalere projektet op til flere droner, der håndterer flere flokke.
 Varme artikler
Varme artikler
-
 Elite N.Koreansk hackergruppe bundet til bankangreb:forskereSikkerhedsforskere siger, at en elitegruppe af nordkoreanske hackere har stjålet hundredvis af millioner af dollars fra banker verden over En elitegruppe af nordkoreanske hackere er blevet identif
Elite N.Koreansk hackergruppe bundet til bankangreb:forskereSikkerhedsforskere siger, at en elitegruppe af nordkoreanske hackere har stjålet hundredvis af millioner af dollars fra banker verden over En elitegruppe af nordkoreanske hackere er blevet identif -
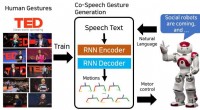 End-to-end læring af generering af co-tale gestus til humanoide robotterDen foreslåede model genererer en sekvens af overkropsstillinger og er trænet på menneskelige gestus fra TED-foredrag. Kredit:Yoon et al. Forskere ved Electronics and Telecommunications Research I
End-to-end læring af generering af co-tale gestus til humanoide robotterDen foreslåede model genererer en sekvens af overkropsstillinger og er trænet på menneskelige gestus fra TED-foredrag. Kredit:Yoon et al. Forskere ved Electronics and Telecommunications Research I -
 Tyskland sigter mod at beskytte tech-virksomheder mod udenlandske overtagelserDet tyske økonomiministerium siger, at teknologivirksomheder skal underlægges strammere regler for overtagelser af ikke-EU-virksomheder Det tyske økonomiministerium sagde torsdag, at det planlagde
Tyskland sigter mod at beskytte tech-virksomheder mod udenlandske overtagelserDet tyske økonomiministerium siger, at teknologivirksomheder skal underlægges strammere regler for overtagelser af ikke-EU-virksomheder Det tyske økonomiministerium sagde torsdag, at det planlagde -
 NASAs X-59 støjsvage supersoniske forskningsfly klarerede til endelig samlingIllustration af den gennemførte X-59 QueSST-landing på en landingsbane. Kredit:Lockheed Martin NASAs første store skala, piloteret X-fly i mere end tre årtier er godkendt til endelig samling og in
NASAs X-59 støjsvage supersoniske forskningsfly klarerede til endelig samlingIllustration af den gennemførte X-59 QueSST-landing på en landingsbane. Kredit:Lockheed Martin NASAs første store skala, piloteret X-fly i mere end tre årtier er godkendt til endelig samling og in
- Den farligste berømthed online afsløres
- Forskere løser en materialemysternøgle til næste generations elektroniske enheder
- Usædvanlig magnetisk struktur understøtter muligvis næste generations teknologi
- hugget i sten? At omdanne kuldioxid til sten, for altid
- Hvad er forskellen mellem styrke og intensitet?
- At lære, hvordan saltmarskplanter kan signalere kulstoffangstkapacitet