


På vej til intelligente mikrorobotter
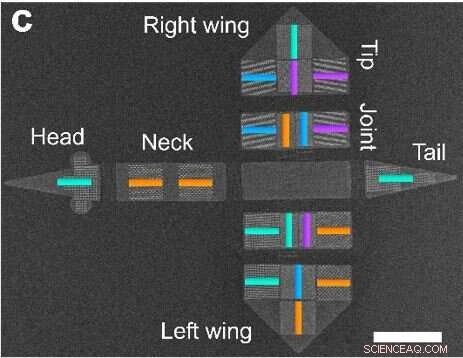
Scanningselektronmikroskopbilledet viser den fuglelignende konstruktion med arrangementer af nanoskala magneter. Magneterne kan magnetiseres i forskellige retninger parallelt med farvebjælkerne. Ved at programmere deres magnetisering, forskerne kan få fuglen til at udføre forskellige bevægelser i et magnetfelt. Kredit:Paul Scherrer Institute/Swiss Federal Institute of Technology, Zürich
Forskere ved Paul Scherrer Institute PSI og ETH Zürich har udviklet en mikromaskine, der kan udføre forskellige handlinger. Først programmeres nanomagneter i komponenterne i mikrorobotterne magnetisk, og derefter styres de forskellige bevægelser af magnetfelter. Sådanne maskiner, som kun er få titalls mikrometer på tværs, kunne bruges, for eksempel, i menneskekroppen til at udføre små operationer. Forskerne har nu offentliggjort deres resultater i det videnskabelige tidsskrift Natur .
Robotten, der måler kun et par mikrometer på tværs, minder om en papirfugl lavet med origami - den japanske kunst med papirfoldning. Men, i modsætning til en papirstruktur, robotten bevæger sig som ved magi uden en synlig kraft. Den klapper med vingerne eller bøjer nakken og trækker hovedet tilbage. Disse handlinger er alle muliggjort af magnetisme.
Forskere ved Paul Scherrer Institute PSI og ETH Zürich har samlet mikromaskinen fra materialer, der indeholder små nanomagneter. Disse nanomagneter kan programmeres til at antage en bestemt magnetisk orientering. Når de programmerede nanomagneter derefter udsættes for et magnetfelt, specifikke kræfter virker på dem. Hvis disse magneter er placeret i fleksible komponenter, de kræfter, der virker på dem, får komponenterne til at bevæge sig.
Programmering af nanomagneter
Nanomagneterne kan programmeres igen og igen. Denne omprogrammering resulterer i forskellige kræfter, og nye bevægelser resulterer.
Til konstruktion af microrobot, forskerne fremstillede arrays af koboltmagneter på tynde ark siliciumnitrid. Fuglen konstrueret af dette materiale kunne derefter udføre forskellige bevægelser, såsom at klappe, svæver, drejning eller sideglidning.
"De bevægelser, der udføres af mikroroboten, finder sted inden for millisekunder, "siger Laura Heyderman, leder af Laboratory for Multiscale Materials Experiments at PSI og professor for Mesoscopic Systems ved Department of Materials, ETH Zürich. "Men programmering af nanomagneterne tager kun et par nanosekunder. Dette gør det muligt at programmere de forskellige bevægelser efter hinanden. Det betyder, at den lille mikrofugl først kan klappe med sine vinger, derefter glide til siden og bagefter klappe igen. "Hvis det er nødvendigt, fuglen kunne også svæve imellem, "siger Heyderman.
Laura Heyderman (til venstre) og Tian-Yun Huang (i midten) ser på en model af origami-fuglen, mens Jizhai Cui observerer den rigtige mikrorobot under et mikroskop. Det, han kan se, vises i videoen, som forskerne lavede. Kredit:Paul Scherrer Institute/Mahir Dzambegovic
Intelligente mikrorobotter
Dette nye koncept er et vigtigt skridt i retning af mikro- og nanorobots, der ikke kun gemmer information for at give en bestemt handling, men kan også omprogrammeres til at udføre forskellige opgaver. "Det kan tænkes, at i fremtiden, en autonom mikromaskine vil navigere gennem menneskelige blodkar og udføre biomedicinske opgaver som at dræbe kræftceller, "forklarer Bradley Nelson, leder af Institut for Mekanik og Process Engineering ved ETH Zürich. "Andre anvendelsesområder kan også tænkes, for eksempel fleksibel mikroelektronik eller mikrolinser, der ændrer deres optiske egenskaber, "siger Tianyun Huang, en forsker ved Institute of Robotics and Intelligent Systems ved ETH Zürich.
Ud over, anvendelser er mulige, hvor overfladens egenskaber ændres. "For eksempel, de kunne bruges til at skabe overflader, der enten kan befugtes af vand eller frastøde vand, "siger Jizhai Cui, ingeniør og forsker i Mesoscopic Systems Lab.
 Varme artikler
Varme artikler
-
 Mennesket versus maskine:Kan AI udføre videnskab?Pyrochlor krystalstrukturen indeholder magnetiske atomer, som er arrangeret til at danne et gitter af tetraedriske former, sluttet i hvert hjørne. Kredit:Theory of Quantum Matter Unit, OIST I løbe
Mennesket versus maskine:Kan AI udføre videnskab?Pyrochlor krystalstrukturen indeholder magnetiske atomer, som er arrangeret til at danne et gitter af tetraedriske former, sluttet i hvert hjørne. Kredit:Theory of Quantum Matter Unit, OIST I løbe -
 Elektronisk skin peger mod nordIngen omfangsrige handsker, ingen sofistikerede kamerasystemer - kun en ultratynd gylden folie på langfingeren. Det er alt, hvad Dresden-forskerne skal bruge for at kontrollere en virtuel panda ved hj
Elektronisk skin peger mod nordIngen omfangsrige handsker, ingen sofistikerede kamerasystemer - kun en ultratynd gylden folie på langfingeren. Det er alt, hvad Dresden-forskerne skal bruge for at kontrollere en virtuel panda ved hj -
 Dit personlige rum er ikke længere fysisk - det er et globalt datanetværkKredit:Silvio Carta, Forfatter oplyst I den digitale verden, enhver handling, vi foretager, genererer data - uanset om du surfer på internettet, besvare e -mails eller sende beskeder til vores ven
Dit personlige rum er ikke længere fysisk - det er et globalt datanetværkKredit:Silvio Carta, Forfatter oplyst I den digitale verden, enhver handling, vi foretager, genererer data - uanset om du surfer på internettet, besvare e -mails eller sende beskeder til vores ven -
 Boeing -aktier ramte, da FAA fandt et nyt 737 MAX -problemSouthwest Airlines, hvis Boeing 737 MAX -fly er vist her parkeret på en californisk asfalt, igen skubbet sin tidsramme tilbage for at returnere flyet til service Aktier i Boeing faldt torsdag, en
Boeing -aktier ramte, da FAA fandt et nyt 737 MAX -problemSouthwest Airlines, hvis Boeing 737 MAX -fly er vist her parkeret på en californisk asfalt, igen skubbet sin tidsramme tilbage for at returnere flyet til service Aktier i Boeing faldt torsdag, en
- Mens Cape Town-tørken bider, hvad er dag nul?
- Colombia - et megadiversparadis, der stadig mangler at blive opdaget
- Hvordan solens magnetiske kræfter arrangerer gaspartikler
- Egenskaber for drivhusgasser
- Hvis du nyser med åbne øjne,
- Stærkere, bedre solceller:Graphen -forskning om nye energikapaciteter