


Uber udvikler teknik til at forudsige fodgængeradfærd, mens nye dokumenter frigives om ulykken sidste år
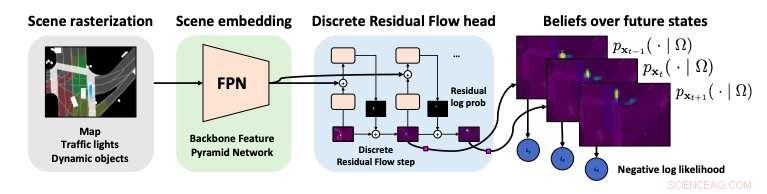
Oversigt over Discrete Residual Flow Network. Kredit:Jain et al.
I de kommende år, selvkørende biler kunne gradvist blive et populært transportmiddel. Inden dette kan ske, imidlertid, forskere bliver nødt til at udvikle værktøjer, der sikrer, at disse køretøjer er sikre og effektivt kan navigere i mennesker befolkede miljøer.
Da selvkørende køretøjer i sidste ende er designet til at bevæge sig rundt både statiske og bevægelige forhindringer, de skal være i stand til hurtigt at opdage genstande og undgå dem. En måde at opnå dette på kan være at udvikle modeller, der kan forudsige objekter eller menneskers fremtidige adfærd på gaden, for at estimere, hvor de vil være placeret, når køretøjet nærmer sig dem.
Forudsiger fremtidige ændringer i bymiljøer, imidlertid, kan være meget udfordrende. Det er især svært, når det kommer til at forudsige menneskelig adfærd, f.eks. fodgængeres bevægelser eller uventede handlinger.
Sidste år, en af Ubers selvkørende biler dræbte Elaine Herzberg, en 49-årig kvinde, i Arizona. Denne ulykke, sammen med snesevis af andre, udløste megen debat om sikkerheden ved selvkørende køretøjer, samt om, hvorvidt disse køretøjer skal testes i befolket miljø.
For cirka en uge siden, nye dokumenter udgivet af U.S.National Transport Safety Board (NTSB) afslørede, at Ubers autonome køretøj, der var involveret i sidste års dødsulykke, ikke identificerede Herzberg som en fodgænger, før det var alt for sent. De samme rapporter tyder på, at det autonome køretøj, der var involveret i styrtet, aldrig blev uddannet til at opdage fodgængere overalt uden for et overgangssted.
Herzberg vandrede på ulykkestidspunktet, så softwarefejlene, som NTSB-rapporten afslørede, ville forklare, hvorfor Ubers selvkørende køretøj ikke kunne se hende, som i sidste ende forårsagede hendes død. De nye analyser frigivet af NTSB kan sætte en stopper for virksomhedens selvkørende køretøjsprogram, som var begyndt at teste igen i december 2018 efter at have været sat på vent i flere måneder.
Disse nye fund fremhæver behovet for at udvikle mere avanceret AI og mere pålidelig software, før selvkørende køretøjer kan testes på egentlige veje. Interessant nok, nogle dage før NTSB offentliggjorde disse dokumenter, et oplæg af forskere ved Uber's Advanced Technologies Group, University of Toronto og UC Berkeley blev forhåndsudgivet på arXiv, introduktion af en ny teknik til at forudsige fodgængeradfærd kaldet diskret residualflow-netværk (DRF-NET). Ifølge forskerne, dette neurale netværk kan komme med forudsigelser om fremtidig fodgængeradfærd og samtidig fange den iboende usikkerhed ved at forudsige bevægelser over lange afstande.
"Vores indlærte netværk fanger effektivt multimodale posteriorer over fremtidig menneskelig bevægelse ved at forudsige og opdatere og diskretisere distributionen over rumlige steder, "skrev forskerne i deres papir.
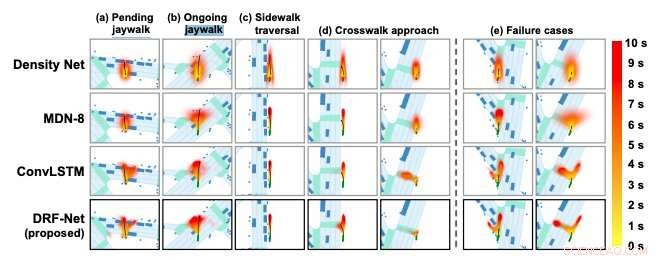
En af tallene i det seneste papir, der viser modellens forudsigelser for fodgængere. Kredit:Jain et al.
Forskerne udtrykte overbevisning om fodgængernes fremtidige positioner gennem kategoriske fordelinger, der repræsenterer rummet. De brugte derefter disse distributioner til at planlægge og optimere stier til selvkørende biler, som tager højde for fodgængernes forventede positioner.
For det første, DTF-NET-netværket, der blev introduceret i deres papir, rastrerer billeder af vejkort, hvilket betyder, at det konverterer dem til et billede sammensat af diskrete pixels. Fodgængeres adfærd er således kodet ind i et rasteret billede i fugleperspektiv, som er tilpasset et detaljeret semantisk kort.
Efterfølgende, netværket udtrækker funktioner, der er særligt nyttige til at forudsige fodgængeres adfærd ud fra de rasteriserede billeder. Endelig, forskerne uddannede deres model til at forudsige fodgængeres fremtidige adfærd på vejen baseret på disse funktioner.
De trænede og evaluerede deres neurale netværk ved hjælp af et stort datasæt, de tidligere har udarbejdet, som indeholder optagelser i den virkelige verden med objektannoteringer og online-detekteringsbaserede spor, samlet i flere byer i Nordamerika. Disse optagelser inkluderer fodgængerbaner, der blev kommenteret manuelt af forskerne i en 360-graders, 120 meter rækkevidde ved hjælp af en LiDAR-sensor på køretøjet.
I evalueringerne foretaget af forskerne, the DTF-NET technique performed well, outperforming several other baseline methods for predicting pedestrian behaviour. This method could thus potentially help to enhance the performance of Uber's self-driving vehicles, allowing them to anticipate the movements of pedestrians and plan their paths accordingly.
"The strong performance of DRF-NET's discrete predictions is very promising for cost-based and constrained robotic planning, "skrev forskerne.
Interessant nok, the pedestrian behaviors processed and predicted by the DTF-NET network, highlighted in one of the recent paper's figures, include 'pending jaywalk, ' 'ongoing jaywalk' and 'sidewalk traversal, ' as well as crosswalk. This seems somewhat ironic, as among other things, the recent documents released by NTSB highlighted the inability of Uber's self-driving vehicle to detect jaywalking pedestrians at the time of the crash in Arizona.
Only time will tell whether the DRF-NET network or other techniques will actually be able to improve the ability of self-driving vehicles to detect pedestrians. Indtil videre, imidlertid, one thing seems clear:Significant advancements in AI and better techniques for detecting pedestrians will be necessary before self-driving vehicles can be safely put on the road.
© 2019 Science X Network
Sidste artikelNyt materiale peger mod højeffektive solceller
Næste artikelGadgets:Multifunktionel clockradio har alarm og meget mere
 Varme artikler
Varme artikler
-
 Toyota, Panasonic danner joint venture i boliger til JapanDriftsansvarlig for Toyota Motor Corporation Masayoshi Shirayanagi, venstre, og Senior Managing Executive Officer for Panasonic Corporation Makoto Kitano tale under et pressemøde i Tokyo, Torsdag, 9 m
Toyota, Panasonic danner joint venture i boliger til JapanDriftsansvarlig for Toyota Motor Corporation Masayoshi Shirayanagi, venstre, og Senior Managing Executive Officer for Panasonic Corporation Makoto Kitano tale under et pressemøde i Tokyo, Torsdag, 9 m -
 Peberplukkerobot demonstrerer sine færdigheder inden for automatisering af drivhusarbejderKredit:MONOPOLY919, Shutterstock Med den stigende mangel på kvalificeret arbejdskraft i landbruget, der er et stigende behov for robotisering til at udføre arbejdskrævende og gentagne opgaver i dr
Peberplukkerobot demonstrerer sine færdigheder inden for automatisering af drivhusarbejderKredit:MONOPOLY919, Shutterstock Med den stigende mangel på kvalificeret arbejdskraft i landbruget, der er et stigende behov for robotisering til at udføre arbejdskrævende og gentagne opgaver i dr -
 Ford, Volkswagen går sammen om den nye grænse for elektriske bilerFord -chef Jim Hackett (R), og VW CEO Herbert Diess går sammen om fremtiden for bilindustrien Volkswagen og Ford går sammen om et massivt projekt på 7 milliarder dollar for at angribe den nye græn
Ford, Volkswagen går sammen om den nye grænse for elektriske bilerFord -chef Jim Hackett (R), og VW CEO Herbert Diess går sammen om fremtiden for bilindustrien Volkswagen og Ford går sammen om et massivt projekt på 7 milliarder dollar for at angribe den nye græn -
 Air France reducerer omkostningerne, da coronavirus stikker:brevKredit:CC0 Public Domain Air France træffer nye omkostningsbesparende foranstaltninger, herunder en delvis ansættelsesfrysning, at opveje virkningen af coronavirus -udbruddet på rejsesektoren, i
Air France reducerer omkostningerne, da coronavirus stikker:brevKredit:CC0 Public Domain Air France træffer nye omkostningsbesparende foranstaltninger, herunder en delvis ansættelsesfrysning, at opveje virkningen af coronavirus -udbruddet på rejsesektoren, i
- Fra orkaner til jordskælv, rumstationseksperiment overvinder udfordringer
- NASA beregnede Filippinernes nedbør fra den tropiske storm Kai-Tak
- Facebook undskylder for at censurere den forhistoriske Venus-statue
- At erklære en vandkrise over er ikke slut på prøvelsen
- Vandig lagerenhed skal kun bruge 20 sekunder
- ESA stiller uret efter fjerne, roterende stjerner