


Forudsige folks kørende personligheder
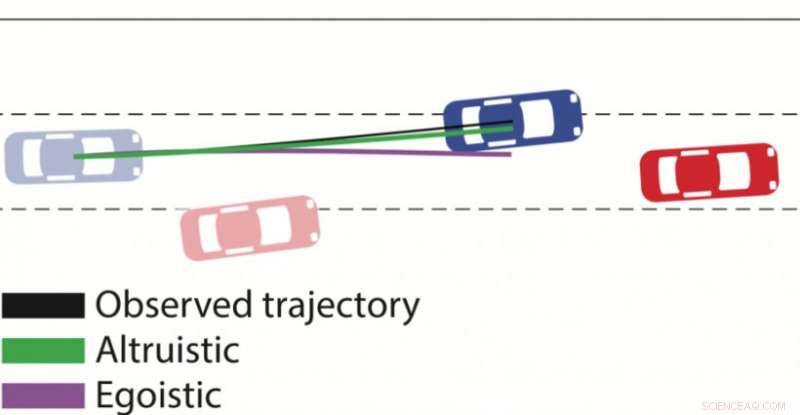
I vognbanesammenlægningsscenarier, et system udviklet på MIT kunne skelne mellem altruistisk og egoistisk køreadfærd. Kredit:Massachusetts Institute of Technology
Selvkørende biler kommer. Men på trods af alle deres smarte sensorer og indviklede data-knusende evner, selv de mest banebrydende biler mangler noget, som (næsten) hver 16-årig med elevtilladelse har:social bevidsthed.
Mens autonome teknologier er blevet væsentligt forbedret, de ser stadig i sidste ende chaufførerne omkring dem som forhindringer, der består af enere og nuller, snarere end mennesker med specifikke hensigter, motivationer, og personligheder.
Men for nylig har et hold ledet af forskere ved MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) undersøgt, om selvkørende biler kan programmeres til at klassificere andre chaufførers sociale personligheder, så de bedre kan forudsige, hvad forskellige biler vil gøre – og, derfor, være i stand til at køre mere sikkert blandt dem.
I et nyt blad, forskerne integrerede værktøjer fra socialpsykologien til at klassificere køreadfærd med hensyn til, hvor egoistisk eller uselvisk en bestemt chauffør er.
Specifikt, de brugte noget, der kaldes social værdiorientering (SVO), som repræsenterer i hvilken grad nogen er egoistisk ("egoistisk") versus altruistisk eller samarbejdsvillig ("prosocial"). Systemet estimerer derefter chaufførers SVO'er for at skabe kørebaner i realtid for selvkørende biler.
Tester deres algoritme på opgaverne med at flette baner og lave ubeskyttede venstresving, holdet viste, at de bedre kunne forudsige andre bilers adfærd med en faktor på 25 procent. For eksempel, i venstresvingssimuleringerne vidste deres bil at vente, når den nærgående bil havde en mere egoistisk chauffør, og for så at tage turen, når den anden bil var mere prosocial.
Selvom det endnu ikke er robust nok til at blive implementeret på rigtige veje, systemet kunne have nogle spændende use cases, og ikke kun for de biler, der kører selv. Lad os sige, at du er et menneske, der kører med, og at en bil pludselig kommer ind i din blinde vinkel - systemet kan give dig en advarsel i bakspejlet om, at bilen har en aggressiv fører, så du kan justere i overensstemmelse hermed. Det kunne også give selvkørende biler mulighed for rent faktisk at lære at udvise mere menneskelignende adfærd, som vil være lettere for menneskelige bilister at forstå.
"At arbejde med og omkring mennesker betyder at finde ud af deres intentioner for bedre at forstå deres adfærd, " siger kandidatstuderende Wilko Schwarting, der var hovedforfatter på det nye papir, der vil blive offentliggjort i denne uge i det seneste nummer af Proceedings of the National Academy of Sciences . "Folks tendenser til at være samarbejdsvillige eller konkurrencedygtige smitter ofte af på, hvordan de opfører sig som drivere. I dette papir, vi søgte at forstå, om dette var noget, vi rent faktisk kunne kvantificere."
Schwartings medforfattere inkluderer MIT-professorerne Sertac Karaman og Daniela Rus, samt forsker Alyssa Pierson og tidligere CSAIL postdoc Javier Alonso-Mora.
Et centralt problem med nutidens selvkørende biler er, at de er programmeret til at antage, at alle mennesker handler på samme måde. Det betyder at, blandt andet, de er ret konservative i deres beslutningstagning ved fire-vejs stop og andre vejkryds.
Selvom denne forsigtighed reducerer risikoen for dødsulykker, det skaber også flaskehalse, der kan være frustrerende for andre bilister, for ikke at nævne svært for dem at forstå. (Dette kan være grunden til, at størstedelen af trafikhændelser har involveret at blive kørt bagfra af utålmodige bilister.)
"At skabe mere menneskelignende adfærd i autonome køretøjer (AV'er) er grundlæggende for sikkerheden for passagerer og omgivende køretøjer, da det at opføre sig på en forudsigelig måde gør det muligt for mennesker at forstå og reagere passende på AV'ens handlinger, " siger Schwarting.
For at forsøge at udvide bilens sociale bevidsthed, CSAIL-teamet kombinerede metoder fra socialpsykologi med spilteori, en teoretisk ramme for at forestille sig sociale situationer blandt konkurrerende spillere.
Holdet modellerede vejscenarier, hvor hver chauffør forsøgte at maksimere deres egen nytteværdi og analyserede deres "bedste svar" givet beslutningerne fra alle andre agenter. Baseret på det lille udsnit af bevægelse fra andre biler, holdets algoritme kunne så forudsige de omkringliggende bilers adfærd som samarbejdsvillig, uselvisk, eller egoistisk – gruppering af de to første som "prosociale". Folks score for disse kvaliteter hviler på et kontinuum med hensyn til, hvor meget en person viser omsorg for sig selv versus omsorg for andre.
I fusions- og venstresvingsscenarier, de to udfaldsmuligheder var enten at lade nogen smelte sammen i din bane ("prosocial") eller ikke ("egoistisk"). Holdets resultater viste, at ikke overraskende, fusionerende biler anses for at være mere konkurrencedygtige end ikke-fusionerende biler.
Systemet blev trænet til at forsøge bedre at forstå, hvornår det er passende at udvise forskellig adfærd. For eksempel, selv de mest ærbødige menneskelige chauffører ved, at visse typer handlinger – som at lave et vognbaneskift i tung trafik – kræver et øjeblik med at være mere selvsikker og beslutsom.
Til næste fase af forskningen, holdet planlægger at arbejde for at anvende deres model på fodgængere, cykler, og andre agenter i kørselsmiljøer. Ud over, de vil undersøge andre robotsystemer, der virker blandt mennesker, såsom husholdningsrobotter, og integrere SVO i deres forudsigelses- og beslutningstagningsalgoritmer. Pierson siger, at evnen til at estimere SVO-fordelinger direkte fra observeret bevægelse, i stedet for i laboratorieforhold, vil være vigtigt for områder langt ud over autonom kørsel.
"Ved at modellere kørende personligheder og inkorporere modellerne matematisk ved hjælp af SVO i beslutningsmodulet i en robotbil, dette arbejde åbner døren til sikrere og mere problemfri vejdeling mellem menneskedrevne og robotdrevne biler, " siger Rus.
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT-forskning, innovation og undervisning.
 Varme artikler
Varme artikler
-
 Mere nøjagtig biopsi ved augmented realityKredit:University of Twente University of Twente er i øjeblikket ved at udvikle en smartphone-teknologi baseret på brugen af Simultaneous Localization And Mapping (SLAM) og augmented reality (AR
Mere nøjagtig biopsi ved augmented realityKredit:University of Twente University of Twente er i øjeblikket ved at udvikle en smartphone-teknologi baseret på brugen af Simultaneous Localization And Mapping (SLAM) og augmented reality (AR -
 Den russiske internetgigant Yandex vil omstrukturere under presDen russiske internetsøgemaskine og nyhedsaggregator Yandex skal køre under et organ, der kan forhindre investorer i at samle en ejerandel på 10 procent eller mere Yandex, internetgiganten siges a
Den russiske internetgigant Yandex vil omstrukturere under presDen russiske internetsøgemaskine og nyhedsaggregator Yandex skal køre under et organ, der kan forhindre investorer i at samle en ejerandel på 10 procent eller mere Yandex, internetgiganten siges a -
 Zuckerberg møder EU-embedsmænd, mens blokkens nye teknologiregler tårner sig opFacebooks administrerende direktør Mark Zuckerberg smiler, mens han giver hånd med EU-kommissæren for værdier og gennemsigtighed Vera Jourova forud for et møde i EUs hovedkvarter i Bruxelles, Mandag,
Zuckerberg møder EU-embedsmænd, mens blokkens nye teknologiregler tårner sig opFacebooks administrerende direktør Mark Zuckerberg smiler, mens han giver hånd med EU-kommissæren for værdier og gennemsigtighed Vera Jourova forud for et møde i EUs hovedkvarter i Bruxelles, Mandag, -
 Historisk Disney+ streaming-lancering skæmmet af fejlLanceringen af Disney+-streamingtjenesten, der havde til formål at imødegå on-demand-tjenester som Netflix, blev skæmmet af forbindelsesfejl Disney åbnede sit enorme arkiv med ankomsten af sin
Historisk Disney+ streaming-lancering skæmmet af fejlLanceringen af Disney+-streamingtjenesten, der havde til formål at imødegå on-demand-tjenester som Netflix, blev skæmmet af forbindelsesfejl Disney åbnede sit enorme arkiv med ankomsten af sin
- Hvordan livet på Jorden påvirkede dets indre virke
- Et kig på transportsikkerhedsregler, der blev sat på sidelinjen under Trump
- Primære og sekundære seksuelle egenskaber
- Vejafgiften stiger i vulkanen i Guatemala, efterhånden som flere lig er kommet sig
- Forbedring af påvisning af et date-voldtægtsmiddel
- Kom indenfor, vandet er superionisk