


ROBOSHERLOCK:et system til at forbedre robottens ydeevne ved manipulationsopgaver
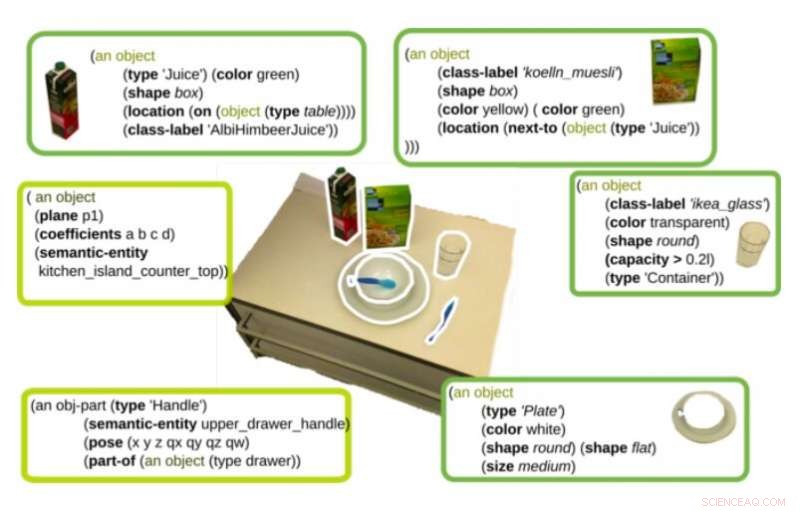
En semantisk rig beskrivelse af en morgenmadsscene. Kredit:Bálint-Benczédi et al.
I løbet af det seneste årti eller deromkring, fremskridt inden for maskinlæring har muliggjort udviklingen af systemer, der er mere og mere autonome, herunder selvkørende køretøjer, virtuelle assistenter og mobile robotter. Blandt andet, forskere, der udvikler autonome systemer, skal identificere måder at integrere komponenter, der er designet til at tackle forskellige og alligevel komplementære delopgaver.
For eksempel, en robot, der udfører manuelle opgaver i en menneskelig brugers hjem, bør være i stand til at fornemme objekter i sit miljø og samtidig hente information om disse objekter, som derefter kan bruges til at planlægge dens bevægelser og handlinger. denne proces, også kendt som "perception-kognition-handling"-paradigmet, er af afgørende betydning, da det i sidste ende giver robotten mulighed for at komme med nyttige strategier og effektivt udføre opgaver.
Indtil nu, de fleste metoder til at implementere dette perception-kognition-action-paradigme i robotter behandler disse tre opgaver som næsten helt uafhængige moduler, der fungerer som sorte bokse for hinanden. Et team af forskere ved universitetet i Bremen og universitetet i München i Tyskland, imidlertid, mener, at det at forbinde en robots "perception"-system med dets kognition (dvs. dens evne til at "ræsonnere" eller hente information om genstande i det omgivende miljø) kunne forbedre dens generelle ydeevne betydeligt.
Med det i tankerne, forskerne udviklede for nylig et kognitivt perceptionssystem, der kunne forbedre ydeevnen af mobile robotter i daglige manipulationsopgaver. Dette system, døbt ROBOSHERLOCK, opnår perception via indholdsanalyse (CA), en strategi, der indebærer brug af statistiske metoder til at analysere enorme mængder data.
Dataene analyseret af ROBOSHERLOCK er "ustrukturerede, "da dens struktur ikke afspejler den semantik, der er forbundet med den, som i en database eller et regneark. Systemet bruger således en strategi kendt som ustruktureret informationsstyring (UIM), hvilket i bund og grund betyder, at det kan behandle store mængder ustrukturerede data (f.eks. tekstdokumenter, lydfiler, billeder, osv.) ved hjælp af et sæt informationsudtrækningsalgoritmer. Hver af disse algoritmer udvinder forskellige typer viden afhængigt af deres "ekspertise, " og de bliver efterfølgende vurderet og kombineret for at nå en enkelt konsekvent beslutning.
"I ROBOSHERLOCK, opfattelse og fortolkning af realistiske scener er formuleret som et ustruktureret informationsstyringsproblem (UIM), " skrev forskerne i deres papir. "Anvendelsen af UIM-princippet understøtter implementeringen af perceptionssystemer, der kan besvare opgaverelevante forespørgsler om objekter i en scene, booste objektgenkendelsens ydeevne ved at kombinere styrkerne ved flere perceptionsalgoritmer, understøtter vidensaktiveret ræsonnement om objekter og muliggør automatisk og vidensdrevet generering af behandlingspipelines."
Forskerne evaluerede deres rammer i en række tests, at anvende det på forskellige systemer til sceneopfattelse i den virkelige verden. De fandt, at "ræsonnementer" om (dvs. behandling) den baggrundsviden, der hentes af dens algoritmer, giver ROBOSHERLOCK mulighed for at besvare en lang række spørgsmål, at gå ud over var er direkte opfatteligt i det omgivende miljø.
Komponenterne i ROBOSHERLOCK præsenteret af forskerne i deres nylige undersøgelse kan ses som dets kernefunktioner. Efterfølgende forskerne har også udviklet flere udvidelser, der forbedrer systemets kognitive evner. For eksempel, de skabte en udvidelse, der gør det muligt for systemet at detektere mennesker og objekter samtidigt, ræsonnement om de handlinger, som mennesker udfører, og intentionerne bag disse handlinger.
"For nylig, vi har undersøgt, hvordan ROBOSHERLOCK-rammen kan sætte agenterne i stand til at 'drømme' og ved hjælp af avancerede spilmotorer generere variationer af en opgave og lære nye opfattelsesmodeller, " skrev forskerne i deres papir. "Alle disse udvidelser ser på robotperception fra perspektivet af en robot, der udfører opgaver, hvilket ikke ville have været muligt uden den kerneramme, der præsenteres her."
© 2019 Science X Network
Sidste artikelFørste kommercielle elektriske fly flyver i Canada
Næste artikelUAW-arbejdere ratificerer ny kontrakt med Fiat Chrysler
 Varme artikler
Varme artikler
-
 Hvordan elbiler kunne gøre Amerikas smuldrende veje endnu værreKredit:CC0 Public Domain Amerikanske veje og broer er i afgrundsdyb form - og det var før de seneste vinterstorme gjorde tingene endnu værre. Faktisk, regeringen vurderer, at over en fjerdedel af
Hvordan elbiler kunne gøre Amerikas smuldrende veje endnu værreKredit:CC0 Public Domain Amerikanske veje og broer er i afgrundsdyb form - og det var før de seneste vinterstorme gjorde tingene endnu værre. Faktisk, regeringen vurderer, at over en fjerdedel af -
 Rockstar mister sin rockstjerne GTA-spilproducentDan Houser, den kreative kraft bag Grand Theft Auto-videospillene, vil forlade Rockstar Games-firmaet, siger firmaet Den kreative kraft bag Grand Theft Auto-videospillene, Dan Houser, forlader næs
Rockstar mister sin rockstjerne GTA-spilproducentDan Houser, den kreative kraft bag Grand Theft Auto-videospillene, vil forlade Rockstar Games-firmaet, siger firmaet Den kreative kraft bag Grand Theft Auto-videospillene, Dan Houser, forlader næs -
 Forebyggelse bedre end helbredelse for at forhindre unge brugere i at blive involveret i cyberkrimin…Kredit:CC0 Public Domain Meget målrettede beskedkampagner fra lovhåndhævelse kan være overraskende effektive til at afholde unge spillere fra at blive involveret i cyberkriminalitet, en ny undersø
Forebyggelse bedre end helbredelse for at forhindre unge brugere i at blive involveret i cyberkrimin…Kredit:CC0 Public Domain Meget målrettede beskedkampagner fra lovhåndhævelse kan være overraskende effektive til at afholde unge spillere fra at blive involveret i cyberkriminalitet, en ny undersø -
 Ekspansionsmikroskopi og virtual reality belyser nye måder at forebygge og behandle sygdom påBrendan Gallagher, en kandidatstuderende i biologiske videnskaber ved Carnegie Mellon University, bruger virtual reality til at undersøge 3D biologiske data indsamlet ved hjælp af ekspansionsmikroskop
Ekspansionsmikroskopi og virtual reality belyser nye måder at forebygge og behandle sygdom påBrendan Gallagher, en kandidatstuderende i biologiske videnskaber ved Carnegie Mellon University, bruger virtual reality til at undersøge 3D biologiske data indsamlet ved hjælp af ekspansionsmikroskop
- Økonomi kan hjælpe med at tackle den globale udfordring med antimikrobiel resistens
- Iran hævder opsendelse af satellit-bærende raket ud i rummet
- Lettelsen kommer langsomt for kystbyer, der kommer sig efter Harvey
- En ny type kvasipartikel
- Sådan finder du et område i et område ved hjælp af en graferegnemner
- Molekylær kredsløb:Teamet bryder en-diode-en modstandselektronik