


Firedimensionelle mikrobyggeklodser:Printbar, tidsrelateret, programmerbare værktøjer
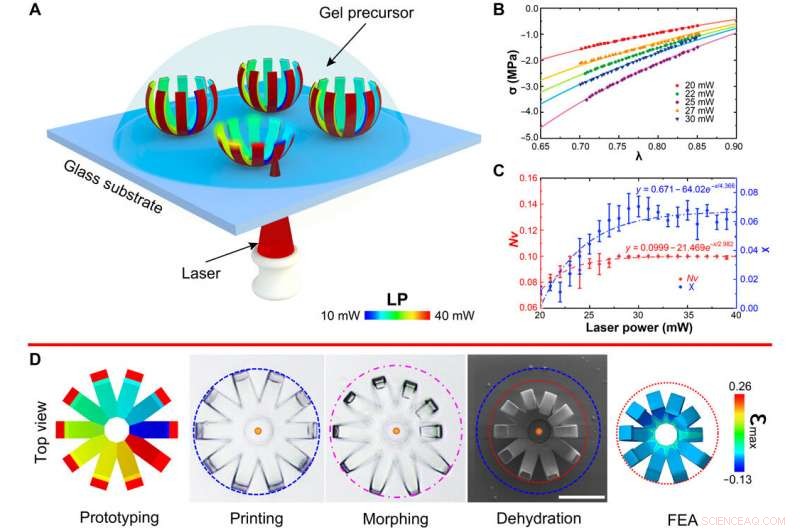
Rumlig og tidsmæssig kontrol i direkte laserskrivning for at muliggøre rumligt kontrollerede differentielt tværbundne polymernetværk. (A) Skematisk over printprocessen ved hjælp af et DLW-system. Farvebjælken for lasereffekten (LP) varierer fra 10 til 40 mW. (B) Mekaniske egenskaber ved det trykte materiale med varierende lasereffekt, hvor σ angiver den nominelle kompressionsspænding og λ er det tilsvarende strækforhold. (C) Effekt af lasereffekt på tværbindingstætheden Nv og Flory-interaktionsparameteren (χ). (D) Blomsterlignende mikrostruktur med programmeret reaktionsevne til at demonstrere kontrollerbar deformation. De ydre (passive) lag af alle kronblade blev printet med en lasereffekt på 40 mW og med en scanningshastighed på 8 mm/s; det indre (aktive) lag af hvert kronblad blev printet med samme hastighed, men med gradvist øget laserkraft. Efter fuldstændig dehydrering, de transformerede kronblade udviste den samme bøjningskrumning som dem, der var forudsagt af FEA. Målestok, 40 μm. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
Firedimensionel (4-D) udskrivning er baseret på sammensmeltning af multimateriale print, forstærkningsmønstre eller mikro- og nanofibrøse tilsætningsstoffer som tidsrelaterede programmerbare værktøjer, for at opnå ønskede formrekonfigurationer. Imidlertid, de eksisterende programmeringstilgange følger stadig et origami-designprincip for at generere rekonfigurerbare strukturer ved hjælp af selvfoldende og stablede 2-D-materialer i små skalaer. I en ny rapport vedr Videnskab fremskridt , T. Y. Huang og et team af tværfaglige, internationale forskere i USA og Kina foreslog et programmerbart modulært design til direkte at konstruere 3-D rekonfigurerbare mikrostrukturer, der er i stand til 3-D-til-3-D-transformationer via 4-D mikro-byggeklodssamling.
Forskerne brugte 4-D direkte laserskrivning til at printe to-foton polymeriserbare og stimuli-følsomme hydrogeler som byggemateriale og konstruerede byggestenene i mikrometerskalaen. Holdet introducerede Denavit-Hartenberg (DH) parametre, der typisk bruges til at definere robotarms kinematik (bevægelse) som en rettesnor til at samle mikrobyggeklodser og planlægge 3D-bevægelsen af samlede kædeblokke. De har også 3D-printet en mikroskala-transformer for at ændre form fra en racerbil til en humanoid robot (meget gerne filmen endnu i lille og i sur opløsning) for at styre bevægelsen af en række sammensatte rum for første gang i laboratoriet.
Form-morphing-systemer har vidtgående anvendelser inden for camouflage, som bløde robotaktuatorer og i biomedicinske enheder til at koordinere maskiner og deres miljøer. Forskere kan bruge computational origami designs som standard 2-D materiale platforme til at konstruere koordineret selv-morphing (selv-shaping), 3-D morphing maskiner. Self-shaping er en unik og kraftfuld teknik, der bruges til at konstruere små maskiner til trådløs aktivering af formændringer, uden afhængighed af manuelle monteringsprocesser. Materialeforskere havde også programmeret formtransformationer inden for 2-D materialer ved at introducere fibrøse mikro- og nanoarkitekturer for at skabe stimuli-responsive geler eller formhukommelsespolymerer. Nylige fremskridt inden for 3-D-printning har bekvemt gjort det muligt for forskere direkte at printe maskiner med rumligt kontrollerede mekaniske egenskaber. Imidlertid, eksisterende state-of-the-art 3-D morphing maskiner er stadig afhængige af 3-D print, der er baseret på en skabelon af plane 2-D selvfoldende origami modstykker.

Modulært morphing-system bestående af 60 byggeklodser kodet til rulleformer ved eksponering for syre. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
En programmerbar designteknik til med succes at danne 3-D-til-3-D-formtransformationer er begrænset på grund af den øgede beregningsmæssige kompleksitet, der kræves for at designe en sådan arkitektur. Hidtil har forskere satset på finite element analyse (FEA) til at simulere formtransformationer af direkte 3-D printede strukturer, imidlertid, processen er tidskrævende med stigende 3-D strukturel kompleksitet. Selvom det er muligt at designe flere algoritmer til automatisk at generere designsamlingen og bevægelsen i modulære robotter, konceptet kan ikke anvendes på mindre maskiner.
I nærværende arbejde, Huang et al. derfor foreslået et programmerbart morphing modulært (brugerdefineret) design, inspireret via modulær robotteknologi og LEGO-lignende byggeklodser. Holdet lettede designet af komplekse 3-D-til-3-D-formtransformationer ved hjælp af direkte 3-D-printede mikrostrukturer. De brugte 4-D direkte laserskrivning (4-D DLW) ved submikron opløsning til at bygge en række mikroskala form-morphing byggeklodser, styres via laserdosering, at hjælpe med overgangen. Ved siden af laserskrivning til modulært design, forskerne fangede fremadrettet og invers kinematik ved hjælp af DH (Denavit-Hartenberg) parametre og introducerede FEA til kvantitativt at studere deformationen af byggesten. DH-parametrene gav dem også mulighed for at samle bevægelse af 3-D-rum til komplekse 3D-til-3-D transformationer ved at reducere beregningsbelastningen.
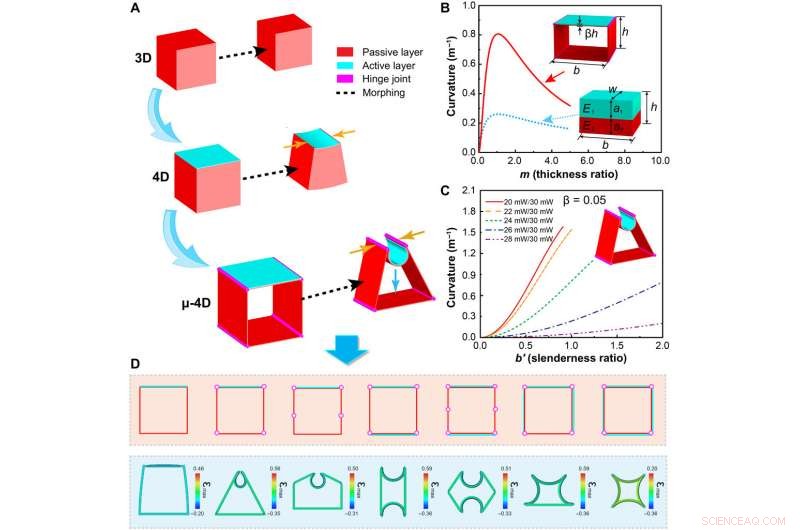
Udvikling af 3D-printede byggesten. (A) 4D mikrobyggeklodser udvikler sig fra konventionelle statiske 3D-printede byggeklodser til deformerbare byggeklodser og videre til leddelte byggeklodser på grund af udviklingen af aktive materialer og mikrobearbejdningsteknikker. Krympningen af det aktive lag driver hovedsageligt deformationen under fald i opløsningsmidlets pH, hvilket får dobbeltlagsstrukturerne til at bøje mod det aktive lag. (B) Virkning af tykkelsesforholdet mellem det aktive lag og det passive lag (m) på bøjningskurvaturen (κ), hvilket indikerer, at de leddelte byggeklodser deformerer mere end konventionelle tolags byggeklodser. (C) Bøjningskrumning af de leddelte byggesten finjusteret ved at variere slankhedsforholdet (b′) mellem bredden og højden af blokkene og laserparametrene mellem de aktive og passive lag. (D) Forskellige simulerede formtransformationstilstande af de leddelte byggeklodser ved at variere det rumlige arrangement af dobbeltlagsmekanismerne og de eftergivende hængselled. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
4-D-udskrivning afhænger stort set af matematik til at håndtere sofistikerede fremadrettede og omvendte problemer, og dens succes afhænger af nøjagtigheden af beregningsmodeller i forhold til de eksperimentelle resultater. Da FEA inviterer til en stor beregningsbelastning, Huang et al. foreslået et modulært design til at rekonstruere en stor og kompliceret 3-D struktur og dens formtransformation ved hjælp af små og diskretiserede byggeklodser, som de introducerede FEA for baseret på Flory-teorien for at studere deformationen af hver byggeklods. Forskerne udførte mikromekaniske kompressionstests i en alkalisk opløsning for at karakterisere spændings- og belastningsforholdet mellem de polymeriserede geler som en funktion af laserkraft.
Efter at have karakteriseret materialet, Huang et al. gennemførte en finite element simulering baseret på den kommercielle software Abaqus for at forudsige formudviklingen af 3-D strukturer med varierende kemisk potentiale. For indledningsvis at verificere nøjagtigheden af FEA-forudsigelsen, de dannede en mikroblomst indeholdende 10 dobbeltlags-lignende kronblade, der hver var kodet med forskellige laserdoser, så forskellige morphing-krumninger kunne svulme op og krympe i forskellige miljøer. Den trykte struktur krympede betydeligt i sure opløsninger - den dominerende drivkraft, der letter deformation i trykte byggesten.
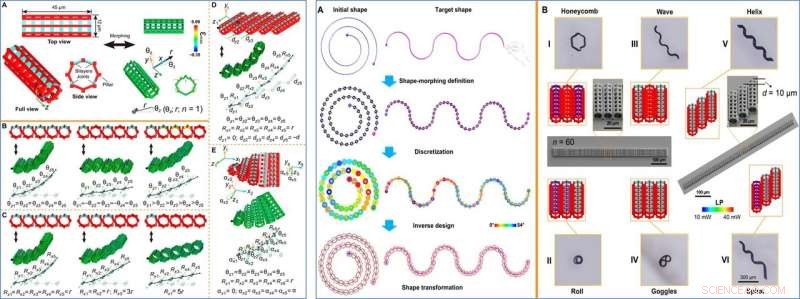
TIL VENSTRE:Designprincip og montageregler for det modulære system ved hjælp af finite element simuleringer. (A) skemaer og designgeometri for de leddelte byggesten, hvis grundstruktur er en ottekantet prismatisk hulcylinder, der består af par aktive lag, passive lag, og hængselsamlinger. (B) Rotationsdeformation induceret af krympningen af de aktive lag. Hver byggesten kan ses som en kombination af en drejeled og en stiv stang, ligner en robotarm. (C til E) Skema af rotationsbevægelser med kontrolleret amplitude og orientering muliggjort ved samling af forskellige forprogrammerede byggeklodser. (B), (C), (D), og (E) definere, hvordan de fire DH-parametre θ, R, d, og α er implementeret i vores modulære byggeklodser, henholdsvis. FEA giver et middel til den kvantitative samling af det komplekse modulære system. TIL HØJRE:Omvendt og fremadrettet design af morphing modulære systemer. (A) Omvendt problemfinding til programmering af en struktur, der omdannes til den ønskede form. I betragtning af en vilkårlig form, såsom en bølge, det modulære design konverterer det til et diskret modstykke med et begrænset antal led og opnår derefter DH-parametrene. Det modulære system konstruerer efterfølgende formtransformationen mellem den givne bølgeform og en samlet rullekonfiguration ved at indkode den omvendte θz i rullen, for at den forvandles til form som en bølge. På billedet af det omvendte design af en rulle kodet med forskellige farver, de udtrukne cirkler indikerer, at θz er positiv, og de hule cirkler indikerer, at θz er negativ. (B) Optiske billeder af de samlede byggeklodser kodet med forskellige DH-parametre. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
Huang et al. derefter repræsenterede 4-D byggesten som kubiske celler med en dobbeltlagskonfiguration indeholdende aktive og passive materialer. De beregnede bindingskrumningen af de formulerede mikrobyggesten, finjusteret af deres slankhedsforhold og laserkraft på det aktive lag. For at samle og planlægge bevægelsen af det modulære system, Huang et al. overvejet den overordnede strukturelle stivhed, samlingsfrihed og programmerbarhed af 4-D mikrobyggeblokkene. De opnåede dette ved at bruge en ottekantet prismatisk mikrocylinder som den grundlæggende byggesten til at konstruere et større og mere kompliceret morphing modulært system.
Forskerne observerede selvsamling af flere byggeklodser for at ligne en robotarm, der genererer de ønskede 3D-bevægelser, som de vurderede ved hjælp af FEA, og resultaterne stemte godt overens med eksperimenterne. Imidlertid, FEA kunne ikke fange bevægelseskompleksitet genereret af et større antal byggeklodser (n> 60). For at løse dette, Huang et al. introducerede DH-parametre (Denavit-Hartenberg) med kun fire fysiske parametre i en lukket analytisk form for at beregne formtransformationer af en robotarm indeholdende flere led og stive stænger. Disse parametre bestemte 3D-transformationerne og samlingsreglerne for det foreslåede modulære system.
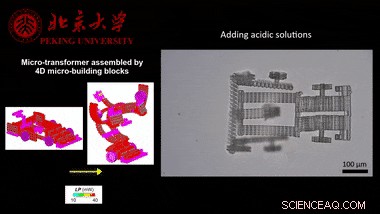
Mikrotransformer samlet af 4-D mikrobyggeklodser. Kredit:Science Advances, doi:10.1126/sciadv.aav8219
Ultimativt, forskerne konstruerede en transformer i mikroskala via 3-D samling og 3-D bevægelsesplanlægning af 4-D byggeklodser, udskrevet med 4-D DLW. Mini-transformatoren indeholdt fem hovedfunktionelle segmenter, inklusive halsen, skulder, arme, rygrad og ben, ved siden af deres forbindelser. Huang et al. fangede transformationer af hvert rum via en række DH-parametre og dannede en unik form-morphing overgang mellem en racerbil og en humanoid robot.
Resultatet var et første-i-studie for at skabe en mini-transformer, der automatisk ændrede sin form til at stå op - i laboratoriet. Imidlertid, det er stadig udfordrende at rationelt designe en transformer, der samtidigt forvandlede sig uden at forstyrre hver komponent til synkroniseret transformation. Mens mikroskala-transformeren er en ekstremt forenklet proof-of-princip-konstruktion til sine større modstykker på skærmen, forskere kan konstruere ægte 4-D trykte strukturer med kodet tidsdimension under udskrivning for at lette rekonfigurerbare designs og danne forskellige rum til sekventielt at transformere efter ønske.
På denne måde T. Y. Huang og kolleger foreslog et programmerbart modulært design baseret på 4-D mikro-byggebloksamling for at hjælpe komplekse fremadrettede og omvendte problemer med 4-D udskrivning. De brugte FEA til at forudsige formudviklingen af hver byggeklods, uden at overveje hele strukturen for at reducere beregningsmæssig kompleksitet. Den resulterende mikroskalatransformator var i stand til komplekse 3D-transformationer baseret på fire DH-parametre og en enkelttrins DLW-fremstillingsproces ved hjælp af fotoresponsive hydrogeler. Huang et al. forudse, at det foreslåede modulære design vil bane vejen for at lette nye designs af kompleks 4-D-print.
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 En fleksibel mikrorobot, der kan overleve næsten enhver deformationDe mindste selvkørende elektroniske mikrorobotter udviklet af forskerne manøvrerer i væske oven på en 1 cent euromønt. Kredit:TU Chemnitz. Et internationalt forskerhold ledet af Dr. Oliver Schmidt
En fleksibel mikrorobot, der kan overleve næsten enhver deformationDe mindste selvkørende elektroniske mikrorobotter udviklet af forskerne manøvrerer i væske oven på en 1 cent euromønt. Kredit:TU Chemnitz. Et internationalt forskerhold ledet af Dr. Oliver Schmidt -
 Lad os gemme solenergi og vindenergi - ved hjælp af trykluftKredit:Grzejnik / shutterstock Elektricitet fra fossile brændstoffer er i stigende grad uholdbar, og et skift til vedvarende energi - hovedsageligt fra solen og vinden - er afgørende. Vedvarende p
Lad os gemme solenergi og vindenergi - ved hjælp af trykluftKredit:Grzejnik / shutterstock Elektricitet fra fossile brændstoffer er i stigende grad uholdbar, og et skift til vedvarende energi - hovedsageligt fra solen og vinden - er afgørende. Vedvarende p -
 Biodiesel-biprodukt hjælper brændstoffet med at blive rentKunstnerisk fremstilling, der skildrer et renere miljø inden for forbrændingscylinderen på en køretøjsmotor, der fremhæver koblingen mellem ren forbrænding og en bæredygtig fremtid. Kredit:KAUST; Xavi
Biodiesel-biprodukt hjælper brændstoffet med at blive rentKunstnerisk fremstilling, der skildrer et renere miljø inden for forbrændingscylinderen på en køretøjsmotor, der fremhæver koblingen mellem ren forbrænding og en bæredygtig fremtid. Kredit:KAUST; Xavi -
 Airbnb tilbyder bolig til 100, 000 kriseresponsorerAirbnb tilbyder gratis eller subsidieret bolig til coronavirus -kriseresponsorer rundt om i verden Airbnb sagde torsdag, at det ville levere gratis eller subsidierede boliger til op til 100, 000 n
Airbnb tilbyder bolig til 100, 000 kriseresponsorerAirbnb tilbyder gratis eller subsidieret bolig til coronavirus -kriseresponsorer rundt om i verden Airbnb sagde torsdag, at det ville levere gratis eller subsidierede boliger til op til 100, 000 n
- Sådan afledes en utility-funktion
- Top 10 strukturelt fantastiske broer
- Overraskende klitter på kometen Chury
- Efter tilbageslag, Alaska rumfartsvirksomhed har igen store forhåbninger
- Ny AI dyb læringsmodel tillader tidligere, mere præcise ozonadvarsler
- Hvordan astronomer opdagede vand på en potentielt beboelig exoplanet for første gang