


Forskere skaber 3-D-printede, svedende robotmuskel
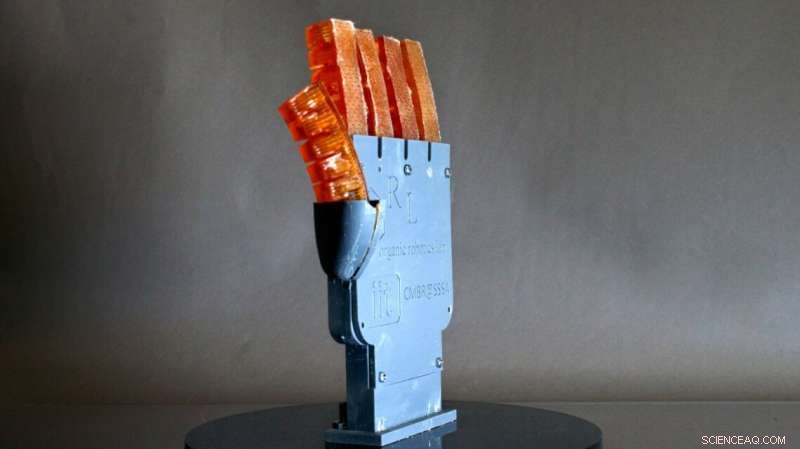
Et Cornell-hold ledet af Rob Shepherd, lektor i maskin- og rumfartsteknik, lavet en 3D-printet hånd med hydraulisk styrede fingre, der kan køle sig selv ved at svede. Kredit:Cornell University
Lige da det så ud som om robotter ikke kunne blive køligere, Cornell-forskere har skabt en blød robotmuskel, der kan regulere dens temperatur gennem sved.
Denne form for termisk styring er en grundlæggende byggesten til at muliggøre ubundet, kraftfulde robotter til at fungere i lange perioder uden overophedning, ifølge Rob Shepherd, lektor i maskin- og rumfartsteknik, der ledede projektet.
Holdets papir, "Autonomisk sved i 3-D-printede hydrogelaktuatorer, " udgivet 29. januar i Videnskab robotik .
En af forhindringerne for at holde ud, tilpasningsdygtige og adrætte robotter styrer robotternes indre temperatur, ifølge Shepherd, avisens seniorforfatter. Hvis motorer med høj momenttæthed og eksoterme motorer, der driver en robot, overophedes, robotten holder op med at fungere.
Dette er et særligt problem for bløde robotter, som er lavet af syntetiske materialer. Selvom det er mere fleksibelt, de holder varmen, i modsætning til metaller, som afleder varmen hurtigt. En intern køleteknologi, såsom en fan, måske ikke meget hjælp, fordi det ville optage plads inde i robotten og øge vægten.
Så Shepherds team tog inspiration fra det naturlige kølesystem, der findes hos pattedyr:svedtendens.
"Evnen til at svede er et af de mest bemærkelsesværdige træk ved mennesker, " sagde co-lead forfatter T.J. Wallin, FRK. '16, Ph.D. '18, en forsker ved Facebook Reality Labs. "Sved udnytter tabet af fordampet vand til hurtigt at sprede varme og kan afkøles til under den omgivende miljøtemperatur... Så som det ofte er tilfældet, biologi var en fremragende guide for os som ingeniører."
Shepherd's team samarbejdede med laboratoriet af Emmanuel Giannelis, Walter R. Læs professor i ingeniørvidenskab, at skabe de nødvendige nanopolymermaterialer til at svede via en 3-D-printteknik kaldet multimateriale stereolitografi, som bruger lys til at hærde harpiks til prædesignede former.
"Vores bidrag er fremstillingen af blandinger af nanopartikler og polymere materialer, der grundlæggende giver os mulighed for at kontrollere viskositeten, eller flow, af disse væsker, sagde Giannelis, også Cornells viceprovost for forskning og vicepræsident for teknologioverførsel, intellektuel ejendomsret og forskningspolitik.
Forskerne fremstillede fingerlignende aktuatorer sammensat af to hydrogelmaterialer, der kan tilbageholde vand og reagere på temperaturen - faktisk, "smarte" svampe. Grundlaget, lavet af poly-N-isopropylacrylamid, reagerer på temperaturer over 30 C (86 F) ved at krympe, som presser vand op i et toplag af polyacrylamid, der er perforeret med mikronstore porer. Disse porer er følsomme over for det samme temperaturområde og udvides automatisk for at frigive "sveden, " Luk derefter, når temperaturen falder til under 30 C.
Fordampningen af dette vand reducerer aktuatorens overfladetemperatur med 21 C inden for 30 sekunder, en afkølingsproces, der er cirka tre gange mere effektiv end hos mennesker, fandt forskerne. Aktuatorerne er i stand til at køle af cirka seks gange hurtigere, når de udsættes for vind fra en ventilator.
"Den bedste del af denne syntetiske strategi er, at den termiske regulatoriske ydeevne er baseret på selve materialet, " sagde Wallin. "Vi behøvede ikke at have sensorer eller andre komponenter for at kontrollere svedhastigheden. Når den lokale temperatur steg over overgangen, porerne ville simpelthen åbne og lukke af sig selv."
Holdet inkorporerede aktuatorfingrene i en robothånd, der kunne gribe og løfte genstande, og de indså, at autonom sveden ikke kun afkølede hånden, men sænkede også objektets temperatur. Mens smøringen kunne gøre en robot-hånd glat, Shepherd siger, at modifikationer af hydrogelteksturen kunne kompensere ved at forbedre håndens greb, meget ligesom rynker i huden.
En ulempe ved teknologien er, at den kan hindre en robots mobilitet. Der er også behov for, at robotterne genopbygger deres vandforsyning, hvilket har fået Shepherd til at forestille sig bløde robotter, der en dag ikke kun vil svede som pattedyr, men drik som dem, også.
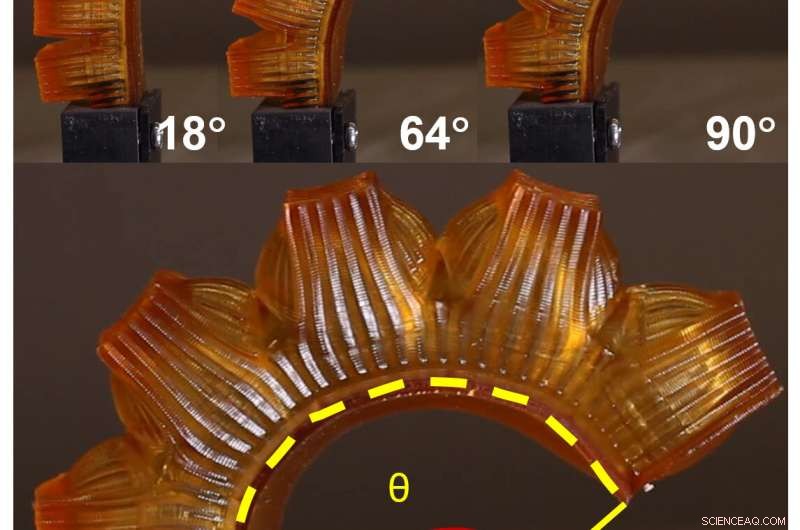
Bøjningsvinklerne for hydrogelaktuatoren, drevet af lufttryk. Kredit:Mishra et al., Sci Robot. 5, eaaz3918 (2020)
En robots evne til at udskille væsker kan også føre til metoder til at optage næringsstoffer, katalyserende reaktioner, fjernelse af forurenende stoffer og belægning af robottens overflade med et beskyttende lag, skrev forskerne.
"Jeg tror, at fremtiden for at lave disse mere biologisk analoge materialer og robotter kommer til at stole på materialesammensætningen, " sagde Shepherd. "Dette bringer et punkt op [om vigtigheden af] multidisciplinær forskning på dette område, hvor der i virkeligheden ikke er én gruppe, der har alle svarene."
Andre bidragydere omfattede postdoc associeret og co-lead forfatter Anand Mishra; postdoc Wenyang Pan; doktorand Patricia Xu; og Barbara Mazzolai fra det italienske teknologiske instituts Center for Micro-BioRobotics.
 Varme artikler
Varme artikler
-
 Driver-ed-inspireret system kunne gøre automatiseret parallel parkering mere tilgængeligKredit:CC0 Public Domain En af de mest udfordrende opgaver for chauffører er parallelparkering, Derfor er automatiske parkeringssystemer ved at blive en populær funktion på nogle køretøjer. Imidle
Driver-ed-inspireret system kunne gøre automatiseret parallel parkering mere tilgængeligKredit:CC0 Public Domain En af de mest udfordrende opgaver for chauffører er parallelparkering, Derfor er automatiske parkeringssystemer ved at blive en populær funktion på nogle køretøjer. Imidle -
 Misty II robots crowdfunding-kampagne har udviklerfællesskabet i tankerneKredit:Misty Robotics Misty Robotics har en ny Misty i vingerne, klar til december, netop den tid på året, hvor søde små robotter står på en masse indkøbslister. Misty II, selvom, er målrettet udv
Misty II robots crowdfunding-kampagne har udviklerfællesskabet i tankerneKredit:Misty Robotics Misty Robotics har en ny Misty i vingerne, klar til december, netop den tid på året, hvor søde små robotter står på en masse indkøbslister. Misty II, selvom, er målrettet udv -
 Hyperloop -projektet går til KinaBibop Gresta (billedet foran en gengivelse af et hyperloop-projekt) planlægger at bygge en 10 kilometer lang testbane i det sydvestlige Kina Hyperloop Transportation Technologies sagde torsdag, at
Hyperloop -projektet går til KinaBibop Gresta (billedet foran en gengivelse af et hyperloop-projekt) planlægger at bygge en 10 kilometer lang testbane i det sydvestlige Kina Hyperloop Transportation Technologies sagde torsdag, at -
 Mistænkt østrigsk bitcoinbedrageri sætter gang i en europæisk undersøgelseEn formodet østrigsk bitcoin -fidus kan have spredt sig over hele Europa Myndigheder, der undersøger en formodet bitcoin -relateret fidus centreret i Østrig, har bedt Interpol om at hjælpe med at
Mistænkt østrigsk bitcoinbedrageri sætter gang i en europæisk undersøgelseEn formodet østrigsk bitcoin -fidus kan have spredt sig over hele Europa Myndigheder, der undersøger en formodet bitcoin -relateret fidus centreret i Østrig, har bedt Interpol om at hjælpe med at
- Statistisk test relaterer patogenmutation til infektionssygdomsprogression
- Boeing forsvarer grundlæggende sikkerhed for 737 MAX efter styrtrapport
- PSA's bestyrelse godkender Fiat-Chrysler-fusion:kilde
- Eliminering af emissioner i Indien og Kina kan føje år til folks liv
- Forskerhold udvikler klinisk valideret 3-D printet stetoskop
- Binær stjerne sammensat af to brune dværge opdaget ved mikrolinsing