


Denne drone kan spille dodgeball - og vinde

Dronen er i stand til at undvige - også selvom bolden nærmer sig den fra en afstand på tre meter med 10 m/s. Kredit:UZH
Ved at bruge en ny type kameraer, forskere fra universitetet i Zürich har demonstreret en flyvende robot, der kan opdage og undgå hurtigt bevægende objekter. Et skridt mod droner, der kan flyve hurtigere i barske omgivelser, opnå mere på kortere tid.
Droner kan mange ting, men at undgå forhindringer er ikke deres stærkeste side endnu - især når de bevæger sig hurtigt. Selvom mange flyvende robotter er udstyret med kameraer, der kan registrere forhindringer, det tager typisk fra 20 til 40 millisekunder for dronen at behandle billedet og reagere. Det kan virke hurtigt, men det er ikke nok at undgå en fugl eller en anden drone, eller endda en statisk forhindring, når selve dronen flyver med høj hastighed. Dette kan være et problem, når droner bruges i uforudsigelige miljøer, eller når der er mange af dem, der flyver i samme område.
Reaktion på et par millisekunder
For at løse dette problem, forskere ved universitetet i Zürich har udstyret en quadcopter (en drone med fire propeller) med specielle kameraer og algoritmer, der reducerede dens reaktionstid ned til et par millisekunder – nok til at undgå en bold, der kastes mod den på kort afstand. Resultaterne, offentliggjort i tidsskriftet Videnskab robotik , kan gøre droner mere effektive i situationer som eftervirkningerne af en naturkatastrofe.
"For eftersøgnings- og redningsapplikationer, som efter et jordskælv, tid er meget kritisk, så vi har brug for droner, der kan navigere så hurtigt som muligt for at opnå mere inden for deres begrænsede batterilevetid, " forklarer Davide Scaramuzza, der leder Robotics and Perception Group ved Universitetet i Zürich samt NCCR Robotics Search and Rescue Grand Challenge. "Imidlertid, ved at navigere hurtigt er droner også mere udsat for risikoen for at kollidere med forhindringer, og endnu mere, hvis disse bevæger sig. Vi indså, at en ny type kamera, kaldet Event Camera, passer perfekt til dette formål".
Event-kameraer har smarte pixels
Traditionelle videokameraer, som dem, der findes i hver smartphone, arbejde ved regelmæssigt at tage snapshots af hele scenen. Dette gøres ved at eksponere billedets pixels på samme tid. Denne måde, selvom, et objekt i bevægelse kan først detekteres, efter at alle pixels er blevet analyseret af den indbyggede computer. Event kameraer, på den anden side, har smarte pixels, der fungerer uafhængigt af hinanden. De pixels, der ikke registrerer nogen ændringer, forbliver tavse, mens dem, der ser en ændring i lysintensitet, straks sender informationen ud. Det betyder, at kun en lille brøkdel af alle pixels i billedet skal behandles af den indbyggede computer, derfor fremskynde beregningen meget.
Eventkameraer er en ny innovation, og eksisterende objekt-detektionsalgoritmer til droner fungerer ikke godt med dem. Så forskerne måtte opfinde deres egne algoritmer, der indsamler alle de begivenheder, kameraet har optaget over meget kort tid, trækker derefter effekten af dronens egen bevægelse fra – som typisk står for de fleste af ændringerne i det, kameraet ser.
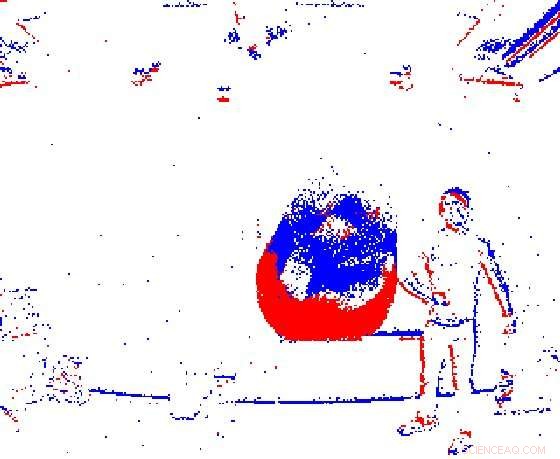
Kameraet fanger bolden, der nærmer sig. Kredit:UZH
Kun 3,5 millisekunder til at registrere indkommende objekter
Scaramuzza og hans team testede først kameraerne og algoritmerne alene. De kastede genstande af forskellige former og størrelser mod kameraet, og målte, hvor effektiv algoritmen var til at detektere dem. Succesraten varierede mellem 81 og 97 procent, afhængig af genstandens størrelse og afstanden til kastet, og systemet tog kun 3,5 millisekunder at opdage indkommende objekter.
Så begyndte den mest seriøse test:at sætte kameraer på en egentlig drone, flyve den både indendørs og udendørs og kaste genstande direkte mod den. Dronen var i stand til at undgå genstandene - inklusive en bold, der blev kastet fra en tre meters afstand og kørte med 10 meter i sekundet - mere end 90 procent af tiden. Da dronen "vidste" størrelsen på objektet på forhånd, ét kamera var nok. Hvornår, i stedet, den skulle stå over for genstande af varierende størrelse, to kameraer blev brugt til at give det stereoskopisk syn.
Ifølge Scaramuzza, disse resultater viser, at begivenhedskameraer kan øge hastigheden, hvormed droner kan navigere, med op til ti gange, dermed udvide deres mulige anvendelser. "En dag vil droner blive brugt til en lang række applikationer, såsom levering af varer, transport af mennesker, luftfilmografi og, selvfølgelig, Søg og Red, " siger han. "Men at sætte robotter i stand til at opfatte og træffe beslutninger hurtigere kan være en game changer for også for andre domæner, hvor pålidelig detektering af indkommende forhindringer spiller en afgørende rolle, såsom biler, god levering, transport, minedrift, og fjerninspektion med robotter".
Næsten lige så pålidelig som menneskelige piloter
I fremtiden, holdet sigter mod at teste dette system på en endnu mere agil quadrotor. "Vores ultimative mål er en dag at få autonome droner til at navigere lige så godt som menneskelige dronepiloter. I øjeblikket, i alle eftersøgnings- og redningsapplikationer, hvor droner er involveret, mennesket har faktisk kontrol. Hvis vi kunne få autonome droner til at navigere lige så pålidelige som menneskelige piloter, ville vi være i stand til at bruge dem til missioner, der falder uden for synsvidde eller uden for rækkevidde af fjernbetjeningen, " siger Davide Falanga, ph.d. studerende, der er den primære forfatter til artiklen.
Sidste artikelFusionsforskere støtter push for pilotkraftværk i USA
Næste artikelGoogle styrker sikkerhedssystemet for alle brugere
 Varme artikler
Varme artikler
-
 Døve og hørehæmmede har sværere ved at læse hypertekstKredit:CC0 Public Domain Unge, der er døve eller hørehæmmede, har meget sværere ved at læse end gennemsnittet. Det anslås, at omkring 70 % af denne gruppe kun er semi-litterate i voksenalderen. Ad
Døve og hørehæmmede har sværere ved at læse hypertekstKredit:CC0 Public Domain Unge, der er døve eller hørehæmmede, har meget sværere ved at læse end gennemsnittet. Det anslås, at omkring 70 % af denne gruppe kun er semi-litterate i voksenalderen. Ad -
 Bayer fortsætter med Monsanto-integration, mens aktien liderTo måneder efter det købte det amerikanske firma, Integrationen af Monsanto i Bayer-koncernen kan begynde, sagde det tysk-baserede selskab Den tyske kemikalie- og medicinalgigant Bayer sagde to
Bayer fortsætter med Monsanto-integration, mens aktien liderTo måneder efter det købte det amerikanske firma, Integrationen af Monsanto i Bayer-koncernen kan begynde, sagde det tysk-baserede selskab Den tyske kemikalie- og medicinalgigant Bayer sagde to -
 Forhandlere ser til millennials for at få glæde af juleshoppingShoppere går på gangene i en Big Lots-butik, der er åben tidligt med Black Friday-udsalg på Thanksgiving Day i Alhambra, Californien den 22. november 2018 Da den amerikanske ferieshoppingsæson sta
Forhandlere ser til millennials for at få glæde af juleshoppingShoppere går på gangene i en Big Lots-butik, der er åben tidligt med Black Friday-udsalg på Thanksgiving Day i Alhambra, Californien den 22. november 2018 Da den amerikanske ferieshoppingsæson sta -
 Forskere dechifrerer elektrisk ledningsevne i doterede organiske halvledereIllustration af et organisk halvlederlag (grønne molekyler) med dopingmolekyle (lilla). Kredit:Sebastian Hutsch, Frank Ortmann Organiske halvledere muliggør fremstilling af trykte og mekanisk flek
Forskere dechifrerer elektrisk ledningsevne i doterede organiske halvledereIllustration af et organisk halvlederlag (grønne molekyler) med dopingmolekyle (lilla). Kredit:Sebastian Hutsch, Frank Ortmann Organiske halvledere muliggør fremstilling af trykte og mekanisk flek
- Flyv med individuelt airconditionerede sæder
- Ny forskning:Mere end hvert andet kvindedrab begås af partneren
- Hvordan COVID-19 forbedrede vores forståelse af migration, medborgerskab og ulighed
- Anvendelsen af forskellige formede magneter
- Solstorme kan være mere ekstreme, hvis de glider efter hinanden
- NASA udvikler kunstig intelligens til fremtidig udforskning af udenjordiske underjordiske oceaner