


En ramme for adaptiv opgavefordeling under multi-robot missioner
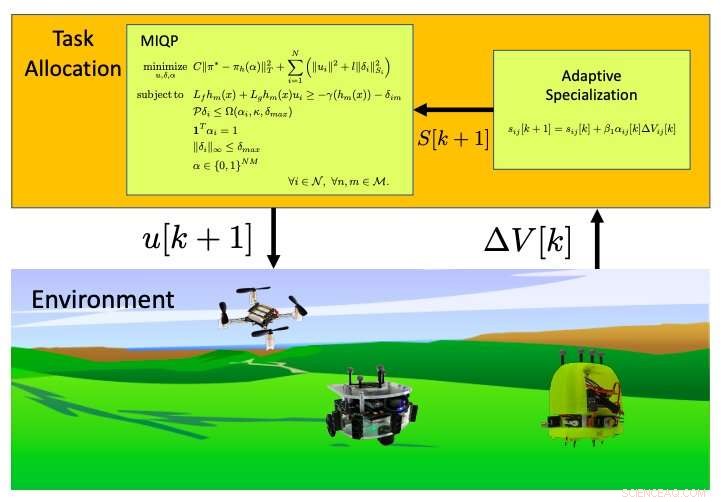
En figur, der illustrerer den foreslåede feedback-loop mellem opgavefordelingsrammen, miljøet, og den adaptive specialiseringsopdatering. Robotternes effektivitet ved hver opgave måles som ∆V [k], som overføres til den adaptive specialiseringsopdateringslov. Når de nye specialiseringsparametre er beregnet, opgavefordelingen MIQP løses og inputs sendes til robotterne. Kredit:Emam et al.
I de seneste år, robotter er blevet mere og mere sofistikerede, derfor er de nu i stand til at udføre en bred vifte af opgaver. Mens nogle robotter er designet til at arbejde individuelt, for eksempel at yde basal hjælp i folks hjem, andre kan være mere effektive, når de implementeres i teams.
Under eftersøgnings- og redningsmissioner, for eksempel efter naturkatastrofer, robotter kan være mere effektive som et team, da de kunne levere forsyninger eller søge efter overlevende hurtigere, dækker større geografiske områder. For at fuldføre missioner som et hold mest effektivt, imidlertid, robotter skal være i stand til at samarbejde godt og effektivt fordele forskellige opgaver mellem hinanden.
Med det i tankerne, forskere ved Georgia Institute of Technology (Georgia Tech) har for nylig udviklet en ramme for adaptiv opgavefordeling under missioner, der skal udføres af et team af robotter. Deres rammer, præsenteret i et papir, der er forududgivet på arXiv, kan tildele opgaver til robotter baseret på deres unikke evner og egenskaber.
"Robothold er forudset til at fungere i dynamiske miljøer, og dette papir foreslår en opdateret regel, der gør det muligt for robotter at vide, hvor egnede de er til hver af de forskellige opgaver, de får tildelt på farten, "Yousef A Emam, en af de forskere, der har udført undersøgelsen, fortalte TechXplore.
Rammen udviklet af forskerne er baseret på en opgavefordelingsteknik for heterogene multirobotsystemer, som de introducerede i en tidligere artikel. Denne tidligere udtænkte strategi indebærer brugen af en algoritme, der tager højde for forskelle i individuelle robotkapaciteter og tildeler opgaver i overensstemmelse hermed. Tildelingen og udførelsen af disse opgaver sker samtidigt.
"Vores rammer løser optimeringsproblemer online, fortæller individuelle robotter, hvordan de skal prioritere deres bidrag til de forskellige opgaver, de skal udføre (dvs. opgavefordeling), og hvordan man gør det (dvs. opgaveudførelse), " sagde Emam.
I deres undersøgelse, Emam og hans kolleger byggede på den opgavefordelingsstrategi, de tidligere udviklede, gør den mere lydhør over for ændringer i robotternes omgivende miljø. I modsætning til den tidligere version, deres nye rammer kræver ikke en eksplicit model af miljøet eller af robotkapaciteter, der er ukendte. I stedet, det tager primært hensyn til de kollektive fremskridt, som holdet af robotter gjorde på en given mission, og hver robots præstation på individuelle opgaver.
"I vores nylige undersøgelse, vi udviklede en feedbacklov, der gør den tidligere udviklede ramme tilpasset til miljøforstyrrelser, " Emam forklarede. "Det betyder, at selvom robotten ikke har perfekt viden om, hvor egnet den er til hver af opgaverne, det vil lære det med det samme."
Forskerne evaluerede deres rammer i en række simuleringer og fandt ud af, at de opnåede meget lovende resultater. I disse forsøg, deres tilgang muliggjorde effektiv opgavefordeling blandt robotter under en række forskellige miljøforhold, selv i tilfælde, hvor de individuelle robotters evner var ukendte før deres implementering.
I fremtiden, opgavefordelingen og udførelsesrammen udviklet af Emam og hans kolleger kunne styrke samarbejdet mellem robotter, der er implementeret som et team, at forbedre deres kollektive præstationer. Dette kunne i sidste ende lette mobiliseringen af robotter i stor skala under eftersøgnings- og redningsmissioner.
"Vi arbejder i øjeblikket på at udvide rammerne til at omfatte hver robots funktioner (f.eks. sensorer, aktuatorer), så vi kan modellere funktionsfejl online mere eksplicit, Emam sagde. et andet aspekt, vi undersøger, er fordelingen af beregninger blandt robotterne (decentraliseret)."
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 AI kunne transformere, hvordan vi overvåger den strukturelle sundhed af civil infrastrukturKredit:CC0 Public Domain University of Surrey og Kings College London har udviklet en ny maskinlæringsalgoritme (AI), der kan ændre den måde, vi overvåger større infrastruktur på – såsom dæmninger
AI kunne transformere, hvordan vi overvåger den strukturelle sundhed af civil infrastrukturKredit:CC0 Public Domain University of Surrey og Kings College London har udviklet en ny maskinlæringsalgoritme (AI), der kan ændre den måde, vi overvåger større infrastruktur på – såsom dæmninger -
 Videnskabelig maskinindlæring baner vej for hurtig raketmotordesignForskere ved Oden Institute udvikler nye modelleringsværktøjer, der bruges til at forudsige en raketmotors adfærd til en brøkdel af omkostningerne ved eksisterende teknologier. Kredit:Oden Institute f
Videnskabelig maskinindlæring baner vej for hurtig raketmotordesignForskere ved Oden Institute udvikler nye modelleringsværktøjer, der bruges til at forudsige en raketmotors adfærd til en brøkdel af omkostningerne ved eksisterende teknologier. Kredit:Oden Institute f -
 Ungarn siger, at Huawei hjælper med at bygge sit 5G trådløse netværkHuaweis roterende formand Guo Ping taler til deltagere ved Web Summit teknologikonferencen i Lissabon, Mandag, 4. nov., 2019. (AP Photo/Armando Franca) Det kinesiske teknologiselskab Huawei vil de
Ungarn siger, at Huawei hjælper med at bygge sit 5G trådløse netværkHuaweis roterende formand Guo Ping taler til deltagere ved Web Summit teknologikonferencen i Lissabon, Mandag, 4. nov., 2019. (AP Photo/Armando Franca) Det kinesiske teknologiselskab Huawei vil de -
 Fremtidens bløde robotter kan være afhængige af nye materialer, der leder elektricitet, sanseskad…Bløde multifunktionelle materialer vil blive brugt i blød robotteknologi og bærbare computere, for eksempel, og vil udføre mange forskellige opgaver samtidigt. Kredit:Michael Ford, CC BY-ND Robott
Fremtidens bløde robotter kan være afhængige af nye materialer, der leder elektricitet, sanseskad…Bløde multifunktionelle materialer vil blive brugt i blød robotteknologi og bærbare computere, for eksempel, og vil udføre mange forskellige opgaver samtidigt. Kredit:Michael Ford, CC BY-ND Robott
- Sådan laver du en Bimetal Strip
- Forskere finder ud af, at røntgenstråler kan forårsage reversible modstandsændringer
- Løsning af problemet med kirurgisk rustfrit stål
- Sådan får du et helt fornyeligt elnet
- At behandle unge mennesker som kriminelle gør faktisk voldskriminalitet værre
- Hvilke organisationer tager fejl af afbrydelser på arbejdet