


Et indendørs MAV-positionsvurderingssystem, der udnytter eksisterende Wi-Fi-infrastruktur
Kredit:Zhang, Wang og Jiang.
Mikroluftfartøjer (MAV'er) kan have adskillige nyttige anvendelser, for eksempel, at hjælpe mennesker med at færdiggøre lageropgørelser eller søge- og redningsmissioner. Mens mange virksomheder verden over allerede er begyndt at producere og bruge MAV'er, nogle af disse flyvende robotter har stadig betydelige begrænsninger.
For at arbejde mest effektivt, MAV'er bør understøttes af et effektivt positur-estimeringssystem. Dette er et system eller en metode, der kan beregne en drones position og holdning, som derefter kan bruges til at styre sin flyvning, justere dens hastighed og hjælpe dens navigation, mens den kører autonomt, og når den fjernstyres.
Forskere ved Huazhong University of Science and Technology i Kina har for nylig udviklet et nyt system til positur-estimering af MAV'er i indendørs miljøer. Deres nye tilgang, skitseret i et papir, der er forududgivet på arXIv og skal udgives i IEEE-transaktioner på industriel elektronik , udnytter eksisterende WiFi-infrastruktur til at muliggøre mere effektiv navigation i små og adrætte droner.
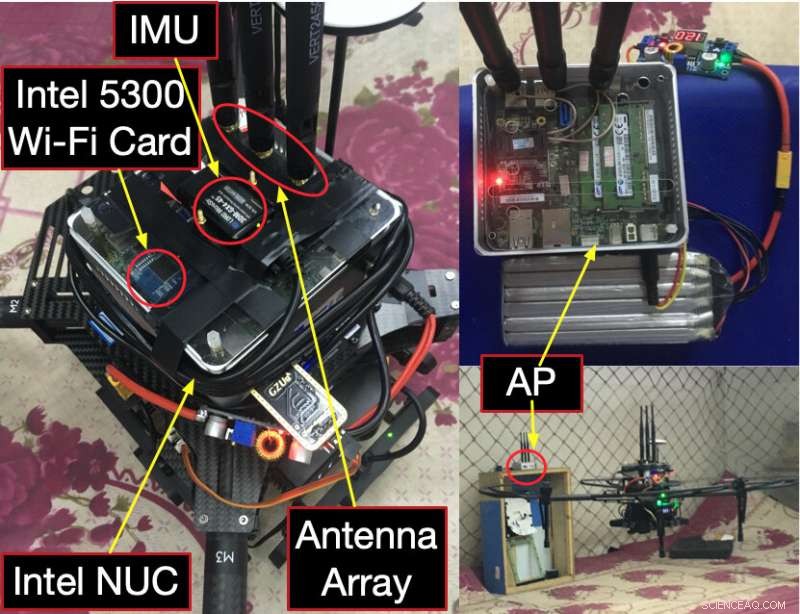
"I vores tidligere arbejde, vi beviste gennemførligheden af at bruge WiFis lokaliserbarhed til at korrigere den indbyggede inertisensor (IMU) drift, "Shengkai Zhang, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Imidlertid, teknikken vi udviklede, døbt CWISE, virker kun i åbne rum og uden multipath fading. I vores nuværende undersøgelse, vi skubber denne metode videre for at løse flervejsproblemet i indendørs miljøer og gøre vores foreslåede system mere praktisk."
Hovedformålet med den nye undersøgelse udført af Zhang og hans kolleger var at bruge let tilgængelig WiFi-infrastruktur til at estimere 6-DoF-stillinger af MAV'er. I modsætning til eksisterende teknikker til vurdering af stilling baseret på computersyn, det system, de udviklede, er fri for visuelle begrænsninger, hvilket betyder, at den fungerer godt under forskellige lys- og miljøforhold.
I stedet for at analysere visuelle stimuli indsamlet af sensorer, systemet udnytter de mange underbærere af WiFi ortogonale frekvens-division multiplexing (OFDM) signaler. Mere specifikt, den bruger disse signaler til at finde ankomstvinklen (AoA) af den direkte vej mellem en MAV og et WiFi-adgangspunkt blandt de mange refleksioner af signalet i indendørs miljøer.
Systemet skabt af Zhang og hans kolleger har to hovedkomponenter:en AoA-estimeringsalgoritme og en WiFi-inertial sensorfusionsmodel. AoA-estimeringsalgoritmen er en beregningsmetode, der estimerer MAV-holdninger og adskiller AoA'en til positionering. WiFi-inertial sensor fusion model, på den anden side, kombinerer den estimerede AoA og data indsamlet ved hjælp af inertisensorer for at optimere en drones positurer.
"Det er velkendt, at vinkler kan bruges til at lokalisere et mål via triangulering, imidlertid, uden en metrisk skala, " sagde Zhang. "På den anden side, IMU'en af en MAV giver metriske positurer, men lider af tidsmæssig drift. Vi fusionerer WiFi AoAs og inertimålinger og tager det bedste fra begge verdener."
Systemet udviklet af Zhang og hans kolleger har adskillige fordele i forhold til mere konventionelle positur-estimeringsteknikker. Først, den er let og kan øjeblikkeligt implementeres i ethvert indendørs miljø, der er dækket af et WiFi-netværk. I øvrigt, den fungerer godt i arbejdsområder med forskellige lys- og teksturforhold.
Undersøgelsen fremhæver potentialet ved at bruge WiFi-forbindelser til at forbedre sansnings- og navigationsstrategier i robotter. Når den er testet i en række eksperimenter i indendørs miljøer, det nye stillingsestimateringssystem opnåede bemærkelsesværdige resultater, præsenterer en gennemsnitlig positionsfejl på 61,7 cm og en holdningsfejl på 0,92 grader. I fremtiden, det kunne bruges til at forbedre MAV-navigation i varehuse, kontorer eller andre indendørs miljøer.
"I øjeblikket, nøjagtigheden af vores WiFi-inertial pose-estimator er på decimeter-niveau, " sagde Zhang. "Det vil vi gerne forbedre. I mellemtiden WiFi i sig selv har nogle begrænsninger, f.eks., strukturblokering, interferens, og så videre. Vi mener, at korrekt kobling af visuel sensing og trådløs sensing ville opnå en mere robust og nøjagtig estimering af posering, hvilket resulterer i mere praktiske autonome robotter."
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 General Motors afskediger midlertidigt 6, 000 arbejdere i Mexico på grund af strejkeUnited Auto Workers har været i strejke hos GM i tre uger, medførte orlov på faciliteter i Canada og nu Mexico General Motors har afskediget 6, 000 arbejdere i Mexico midlertidigt på grund af en a
General Motors afskediger midlertidigt 6, 000 arbejdere i Mexico på grund af strejkeUnited Auto Workers har været i strejke hos GM i tre uger, medførte orlov på faciliteter i Canada og nu Mexico General Motors har afskediget 6, 000 arbejdere i Mexico midlertidigt på grund af en a -
 For auto tech på CES, brugeroplevelse bliver nøglenBilproducenter udvikler cockpits, der er rettet mod konventionelle såvel som automatiserede køreposter som denne fra Kina -baserede bilstart Byton, set på Consumer Electronics Show i Las Vegas Tek
For auto tech på CES, brugeroplevelse bliver nøglenBilproducenter udvikler cockpits, der er rettet mod konventionelle såvel som automatiserede køreposter som denne fra Kina -baserede bilstart Byton, set på Consumer Electronics Show i Las Vegas Tek -
 Equifax identificerer 2,4 millioner mere berørt af massivt hackDenne 21. juli, 2012, filbillede viser skiltning ved Equifax Inc.s hovedkvarter i Atlanta. Equifax sagde torsdag, 1. marts, 2018, at yderligere 2,4 millioner amerikanere blev ramt af sidste års databr
Equifax identificerer 2,4 millioner mere berørt af massivt hackDenne 21. juli, 2012, filbillede viser skiltning ved Equifax Inc.s hovedkvarter i Atlanta. Equifax sagde torsdag, 1. marts, 2018, at yderligere 2,4 millioner amerikanere blev ramt af sidste års databr -
 Sociale medier får tommelfingeren nedad i ny amerikansk meningsmålingAmerikanere udtrykker alvorlige bekymringer over sociale mediers rolle i misinformation og beskyttelse af personlige data, men de fleste bruger stadig netværkene, ifølge en ny meningsmåling Amerik
Sociale medier får tommelfingeren nedad i ny amerikansk meningsmålingAmerikanere udtrykker alvorlige bekymringer over sociale mediers rolle i misinformation og beskyttelse af personlige data, men de fleste bruger stadig netværkene, ifølge en ny meningsmåling Amerik
- Rusland vil erstatte 2 kosmonauter sat til opsendelse til rummet
- Fem COVID-skikker, der dukkede op under lockdown
- En kosmopolitisk by
- Hoppefilm udnytter fugtighedens kraft
- Rangering af den relative restriktivitet af hvert enkelt staters stemmemiljø i 2020
- Hvordan kan dele af Canada mangle tyngdekraften?