


LoCoQuad:En arachnoid-inspireret robot til forsknings- og uddannelsesformål
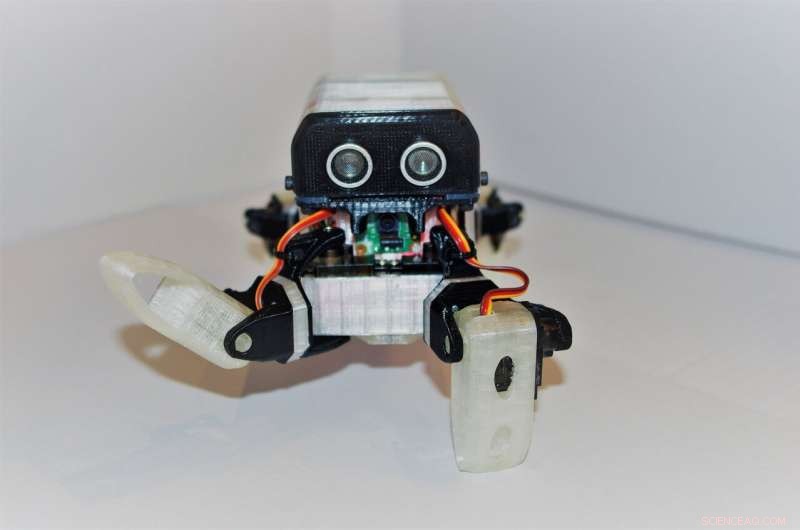
LoCoQuad, robotten udviklet af forskerne. Kredit:Bernal &Civera
Dyreadfærd og de biologiske mekanismer, der ligger til grund for dem, er blandt de største inspirationskilder til robotstudier. I løbet af det seneste årti eller deromkring, utallige forskerhold på universiteter og virksomheder verden over har forsøgt at udvikle robotter, der genskaber adfærden eller strukturen hos specifikke dyrearter.
Et af de seneste forsøg blev lavet af to forskere ved universitetet i Zaragoza, Manuel Bernal Lecina og Javier Civera, som for nylig udviklede en firbenet robot kaldet LoCoQuad inspireret af arachnoider. Denne robot, præsenteret i et papir, der er forududgivet på arXiv, kunne have en række anvendelser inden for robotforskning og -uddannelse.
"Denne forskningsrejse begyndte med et sommerprojekt, der blev min bachelorafhandling, Bernal-Lecina fortalte TechXplore. "Den oprindelige idé var at bygge en superbillig robotplatform, der var i stand til grundlæggende ad hoc-bevægelser, såsom rotation, gå, og indtager specifikke stillinger. Jeg begyndte at bygge grundlæggende prototyper og teste fordelene ved hver iteration, søger efter den rigtige typologi og det bedste pris-kvalitet-kompromis for aktuatorer, kontrolenheder, og batterier."
Efter at han havde udført omfattende forskning i billige robotter og produceret en række komponenter ved hjælp af 3-D-print, Bernal-Lecina begyndte at samarbejde med Javier Civera, hans mentor på universitetet, om skabelsen af en ny robot. Deres mål var at udvikle en billig robotplatform, der kunne bruges som benchmark til at træne og evaluere forstærkningslæringsalgoritmer (RL).
"Vores undersøgelse adresserede det nuværende behov for robotplatforme, der er i stand til at lære ved at gøre, noget komplekst for en billig robot, men også noget vi konstant ser i sociale netværk, mobilteknologi og andre digitale miljøer, " sagde Bernal-Lecina.
LoCoQuad, den arachnoid-inspirerede, firbenet robotplatform skabt af Bernal-Lecina og Civera, har bemærkelsesværdigt lave hardwareomkostninger (mellem $150 og $165 USD), og kunne dermed sagtens fremstilles i stor skala. Selvom det måske ikke er den mest effektive firbenede robot udviklet til dato, dens lave produktionsomkostninger, det faktum, at det er open source, meget konfigurerbar og brugervenlig, gøre det til en meget lovende platform for både forskning og uddannelse.
"Jeg kan altid godt lide at tale om LoCoQuad som en robotplatform, der er i stand til næsten alt, " sagde Bernal-Lecina. "Men at være realistisk og en smule mere rationel, LoCoQuad er en kasse med fire ben, fuldstændig open source og generelle formål, med fleksibiliteten til at implementere en bred vifte af algoritmer, lige fra adfærd, der er relevant for grundlæggende uddannelsesformål, til fremme af state-of-the-art på de højeste uddannelsesniveauer."
Som en del af deres studie, Bernal-Lecina og Civera demonstrerede effektiviteten af LoCoQuad i en række eksperimenter. De fandt ud af, at robotten kunne udføre en række grundlæggende opgaver, tyder på, at det er en fantastisk platform til at teste forstærkningslæring og andre maskinlæringsalgoritmer.
"Idéen om at bringe robotter til en overkommelig pris på markedet ligger i de evner, som disse robotter kan have, " sagde Bernal-Lecina. "Vi har ikke brug for flere dumme robotter, dem har vi allerede nok af, og vi ved, hvordan man bruger dem. Vi har brug for kloge og autonome robotter, så vi ikke behøver at bekymre os om dem. Jeg mener, at robotter bør faktisk, pas på os."
Maskinlæringsteknikker, såsom forstærkende læringsmodeller, spiller nu en afgørende rolle i udviklingen af smarte og effektive robotter. LoCoQuad, lavpris robotplatformen udviklet af Bernal Lecina og Civera, kan bruges til at teste nogle af disse teknikker og identificere måder, hvorpå de kan forbedres.
"LoCoQuad er blot endnu en brik i puslespillet, Bernal Lecina forklarede. "Det giver os mulighed for at demonstrere, at selv klodset, billige og simple robotter kan læres (eller lære af sig selv) at udføre grundlæggende og komplekse opgaver. LoCoQuad bringer et nyt alternativ til at bekræfte, at den næste store milepæl inden for robotteknologi er mulig."
Bernal Lecina og Civera er allerede begyndt at bruge LoCoQuad i andre undersøgelser for at sammenligne algoritmer og identificere de mest effektive. LoCoQuads design og den nødvendige software til at implementere det er blevet offentliggjort online og kan downloades gratis på GitHub. Forskerne håber, at andre hold verden over vil downloade deres software og begynde at bruge LoCoQuad til at teste deres egne maskinlæringsalgoritmer.
"Vi vil fortsætte med at arbejde på opdateringer til vores fantastiske lille robot, Bernal Lecina sagde. "Vores første mål er at forbedre hjernens evner for at gøre platformen mere interessant for andre universiteter og forskningsgrupper, så de kan begynde at bruge LoCoQuad som referenceplatform til at teste deres algoritmer og også begynde at undervise i mobil robotik på lavere akademiske niveauer med en robot til hver elev."
© 2020 Science X Network
Sidste artikelAlphabets DeepMind mestrer Atari-spil
Næste artikelDelta ser et fald på 90 % i omsætningen i andet kvartal på grund af virus
 Varme artikler
Varme artikler
-
 Bioinspirerede robotter kan nu lære at sværme på fartenVed hjælp af en specialfremstillet sværm af robotter med høj processorkraft indlejret i sværmen, Bristol -teamet opdagede, hvilke regler der giver anledning til ønsket sværmadfærd. Kredit:University o
Bioinspirerede robotter kan nu lære at sværme på fartenVed hjælp af en specialfremstillet sværm af robotter med høj processorkraft indlejret i sværmen, Bristol -teamet opdagede, hvilke regler der giver anledning til ønsket sværmadfærd. Kredit:University o -
 Amerikanske bilarbejdere på VW -fabrikken afviser bud om fagforeningArbejdere på VWs fabrik i Chattanooga afviste forsøget på at organisere sig med 833-776 United Auto Workers fagforeningen har lidt et nyt nederlag på en Volkswagen -fabrik i Tennessee, med arbejde
Amerikanske bilarbejdere på VW -fabrikken afviser bud om fagforeningArbejdere på VWs fabrik i Chattanooga afviste forsøget på at organisere sig med 833-776 United Auto Workers fagforeningen har lidt et nyt nederlag på en Volkswagen -fabrik i Tennessee, med arbejde -
 Bezos forsvarer Amazons indsats for Pentagon -skyprojektAmazons Jeff Bezos siger, at teknologigiganten fastholder sit bud på en større Pentagon cloud computing -kontrakt Amazon -chef Jeff Bezos forsvarede mandag selskabets bud på en større Pentagon clo
Bezos forsvarer Amazons indsats for Pentagon -skyprojektAmazons Jeff Bezos siger, at teknologigiganten fastholder sit bud på en større Pentagon cloud computing -kontrakt Amazon -chef Jeff Bezos forsvarede mandag selskabets bud på en større Pentagon clo -
 Rockstar mister sin rockstjerne GTA-spilproducentDan Houser, den kreative kraft bag Grand Theft Auto-videospillene, vil forlade Rockstar Games-firmaet, siger firmaet Den kreative kraft bag Grand Theft Auto-videospillene, Dan Houser, forlader næs
Rockstar mister sin rockstjerne GTA-spilproducentDan Houser, den kreative kraft bag Grand Theft Auto-videospillene, vil forlade Rockstar Games-firmaet, siger firmaet Den kreative kraft bag Grand Theft Auto-videospillene, Dan Houser, forlader næs
- Hvad er krukkenes slette?
- Foreskrevne brande fortærer Kansas landskab
- Kan kulaske være en levedygtig kilde til sjældne jordarters metaller?
- Hvilken enhed opfandt Douglas Engelbart?
- 5 grunde til at sikre, at frikvarteret ikke bliver kort, når skolen genoptages personligt
- 15 nye gekko -arter opdaget i Myanmar