


Flydende kredsløb tilføjer analoge muligheder for styring af bløde robotter
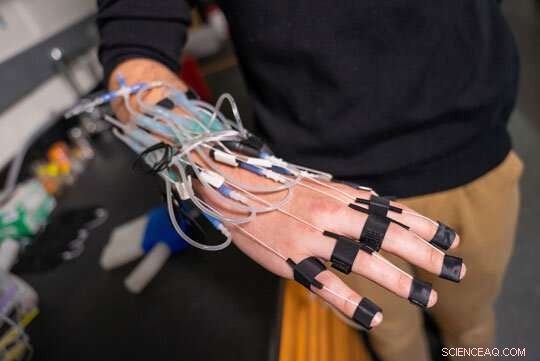
Rice University-studerende Colter Decker, en senior hovedfag i maskinteknik, demonstrerer en handske, der blev brugt til at demonstrere de analoge funktioner i blødt pneumatisk styrekredsløb til blød robotteknologi. Kredit:Brandon Martin/Rice University
Tilføj analog og luftdrevet til listen over styresystemmuligheder for bløde robotter.
I en undersøgelse offentliggjort online i denne uge viste robotteknologiforskere, ingeniører og materialeforskere fra Rice University og Harvard University, at det er muligt at lave programmerbare, ikke-elektroniske kredsløb, der styrer bløde robotters handlinger ved at behandle information kodet i trykluftsudbrud.
"En del af det smukke ved dette system er, at vi virkelig er i stand til at reducere beregningen ned til dets basiskomponenter," sagde Rice bachelor Colter Decker, hovedforfatter af undersøgelsen i Proceedings of the National Academy of Sciences i> . Han sagde, at elektroniske kontrolsystemer er blevet finpudset og forfinet i årtier, og at genskabe computerkredsløb "med analoger til tryk og flowhastighed i stedet for spænding og strøm" gjorde det lettere at inkorporere pneumatisk beregning.
Decker, en senior med speciale i maskinteknik, konstruerede sit bløde robotstyringssystem primært af hverdagsmaterialer som plastiksugerør og gummibånd. På trods af sin enkelhed viste eksperimenter, at systemets luftdrevne logiske porte kunne konfigureres til at udføre operationer kaldet booleske funktioner, som er kødet og kartoflerne i moderne computere.
"Målet var aldrig helt at erstatte elektroniske computere," sagde Colter. Han sagde, at der er mange tilfælde, hvor bløde robotter eller wearables kun skal programmeres til nogle få enkle bevægelser, og det er muligt, at teknologien, der er demonstreret i papiret, "ville være meget billigere og sikrere at bruge og meget mere holdbar" end traditionelle elektroniske kontroller.
Som nybegynder begyndte Decker at arbejde i laboratoriet hos Daniel Preston, en assisterende professor i maskinteknik ved Rice. Decker studerede væskekontrolsystemer og blev interesseret i at skabe et, da han vandt et konkurrencedygtigt sommerforskningsstipendium, der ville give ham mulighed for at tilbringe et par måneder i laboratoriet hos Harvard-kemikeren og materialeforskeren George Whitesides.
Projektet blev til et månedslangt samarbejde mellem de to forskergrupper, og Decker havde ni medforfattere på undersøgelsen, inklusive medkorresponderende forfattere Preston og Whitesides.
Decker og kolleger skabte to komponenter, en stempellignende aktuator, der omsætter lufttryk til mekanisk kraft og en ventil, der kan skiftes mellem to tilstande - slukket og tændt. Komponenterne blev lavet af dele, der omfattede plastiksugerør, fleksible plastikslanger, gummibånd, pergamentpapir og termoplastiske polyurethanplader, der kunne bindes sammen med en skrivebordsvarmepresse eller et varmt strygejern.
Forskerholdet viste, at de to komponenter kunne kombineres i en enkelt enhed, en bistabil ventil, der fungerer som en kontakt og bruger lufttryk som både input og output. Der kræves en bestemt mængde lufttryk for at skifte mellem slukket og tændt tilstand. Ventilerne holdes lukket af gummibånd, og de programmeres ved at tilføje eller fratrække gummibånd, hvilket ændrer mængden af tryk, der kræves til aktivering. I test viste Decker, at kredsløbene kunne bruges til at styre en blød, håndformet robot, en pneumatisk pude og en robot i skoæskestørrelse, der kunne gå et forudprogrammeret antal skridt, hente en genstand og vende tilbage til dens startposition.
"Den største bedrift i dette arbejde er inkorporeringen af både digital og analog kontrol i den samme systemarkitektur," sagde Preston. At have begge betyder, at de pneumatiske styrekredsløb kan programmeres digitalt med de "etere og nuller, som du tænker på i en traditionel computer. Men vi kan også bringe analoge muligheder ind, ting, der er kontinuerlige," sagde han. "Det giver os mulighed for virkelig at forenkle den overordnede systemarkitektur og opnå nye funktioner, som ikke var tilgængelige i tidligere arbejde." + Udforsk yderligere
Wearables tager et "logisk" skridt mod indbygget kontrol
 Varme artikler
Varme artikler
-
 Groupon kunne være på udkig efter at erhverve Yelp midt i aktionærernes utilfredshedKredit:CC0 Public Domain Groupon, den kæmpende Chicago-baserede tilbudsside, kunne se opkøbet af online anmeldelsesside Yelp. Aktionærerne er utilfredse med Groupons økonomiske resultater og akti
Groupon kunne være på udkig efter at erhverve Yelp midt i aktionærernes utilfredshedKredit:CC0 Public Domain Groupon, den kæmpende Chicago-baserede tilbudsside, kunne se opkøbet af online anmeldelsesside Yelp. Aktionærerne er utilfredse med Groupons økonomiske resultater og akti -
 Snapchat lancerer egen multi-player gaming platformSnapchat – den populære beskedapp – lancerer sin egen multiplayer-spilplatform Messaging app Snapchat, som er meget populær blandt yngre brugere, men har kæmpet for at tjene penge siden oprettelse
Snapchat lancerer egen multi-player gaming platformSnapchat – den populære beskedapp – lancerer sin egen multiplayer-spilplatform Messaging app Snapchat, som er meget populær blandt yngre brugere, men har kæmpet for at tjene penge siden oprettelse -
 Nysgerrig efter at vide, hvordan det er at være i ildlinjen?Kredit:University of South Australia Forskere fra University of South Australia og SA Country Fire Service (CFS) er gået sammen om at give beboerne en frygtelig oplevelse af et skovbrand - alt sam
Nysgerrig efter at vide, hvordan det er at være i ildlinjen?Kredit:University of South Australia Forskere fra University of South Australia og SA Country Fire Service (CFS) er gået sammen om at give beboerne en frygtelig oplevelse af et skovbrand - alt sam -
 Twitter tweak øger kampen mod troldeTwitter sagde tirsdag, at det intensiverer sin langvarige kamp mod onlinetrolde, forsøger at finde lovovertrædere ved at se på adfærdsmæssige signaler. Den nye tilgang ser på brugernes adfærdsmønstre
Twitter tweak øger kampen mod troldeTwitter sagde tirsdag, at det intensiverer sin langvarige kamp mod onlinetrolde, forsøger at finde lovovertrædere ved at se på adfærdsmæssige signaler. Den nye tilgang ser på brugernes adfærdsmønstre
- Sådan laves solsystemprojekter til børn
- Undersøgelse rapporterer jernoxid -nanopartikler, der er effektive til mærkning af humane endotelc…
- Sådan fungerer landminer
- Mikrober i underjordiske akviferer under dybhavs Mid-Atlanterhavsryg tygger ned på kulstof
- Tranebæroligosaccharider kan hjælpe med at forhindre UVI
- Undersøgelse:Folk er typisk tilbøjelige til at flytte forhold fremad i stedet for at afslutte dem