


Avanceret robotteknologi til at løse den translationelle kløft i seneteknik:Gennemgang af papir
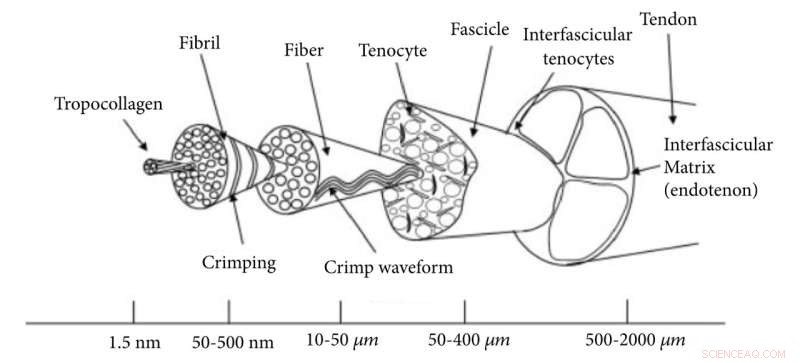
Hierarkisk struktur af senevæv (tilpasset fra Thorpe et al). Kredit:Cyborg and Bionic Systems (2022). DOI:10.34133/2022/9842169
En gennemgang af videnskabsmænd ved University of Oxford diskuterede mulige fordele ved at bruge humanoide muskuloskeletale robotter og bløde robotsystemer som bioreaktorplatforme til at producere klinisk nyttige senekonstruktioner.
Det nye reviewpapir, offentliggjort den 15. september 2022 i tidsskriftet Cyborg and Bionic Systems , opsummerer aktuelle tendenser inden for senevævskonstruktion og diskuterer, hvordan konventionelle bioreaktorer ikke er i stand til at give fysiologisk relevant mekanisk stimulering, da de stort set er afhængige af enaksede trækstadier. Artiklen fremhæver derefter muskuloskeletale humanoide robotter og bløde robotsystemer som platforme til at levere fysiologisk relevant mekanisk stimulering, der kunne overvinde denne translationelle kløft.
Sene- og bløddelsskader er et voksende socialt og økonomisk problem, hvor markedet for senereparation i USA anslås til 1,5 milliarder USD. Senereparationsoperationer har høje revisionsrater, hvor op mod 40 % af rotatorcuff-reparationerne mislykkes postoperativt. Produktion af konstruerede senegrafts til klinisk brug er en potentiel løsning på denne udfordring. Konventionelle senebioreaktorer giver hovedsageligt enakset trækstimulering. Manglen på systemer, som rekapitulerer in vivo senebelastning er et stort translationelt hul.
"Den menneskelige krop forsyner sener med tredimensionel mekanisk stress i form af spænding, kompression, torsion og forskydning. Aktuel forskning tyder på, at sundt naturligt senevæv kræver flere typer og retninger af stress. Avancerede robotsystemer såsom muskuloskeletale humanoider og bløde robotteknologi lovende platforme, der muligvis kan efterligne in vivo senebelastning," forklarede forfatter Iain Sander, en forsker ved University of Oxford med Soft Tissue Engineering Research Group.
Muskuloskeletale humanoide robotter blev oprindeligt designet til applikationer som crashtestdukker, proteser og atletisk forbedring. De forsøger at efterligne menneskets anatomi ved at have lignende kropsproportioner, skeletstruktur, muskelarrangement og ledstruktur. Muskuloskeletale humanoider såsom Roboy og Kenshiro bruger senedrevne systemer med myorobotiske aktuatorer, der efterligner humant neuromuskulært væv.
Myorobotic-enheder består af en børsteløs jævnstrømsmotor, der genererer spændinger som menneskelige muskler, fastgørelseskabler, der fungerer som seneenhed, og et motordrevkort med en fjederkoder, der fungerer som det neurologiske system ved at registrere variabler, herunder spænding, kompression, muskellængde og temperatur.
Foreslåede fordele ved muskuloskeletale humanoider inkluderer evnen til at give multiaksial belastning, potentiale for belastning under hensyntagen til menneskelige bevægelsesmønstre og tilvejebringelse af belastningsstørrelser, der kan sammenlignes med in vivo-kræfter. En nylig undersøgelse har vist gennemførligheden af at dyrke menneskeligt væv på en muskuloskeletal humanoid robot til senekonstruktion.
Biohybrid blød robotteknologi er fokuseret på at udvikle biomimetiske, kompatible robotsystemer, som tillader adaptive, fleksible interaktioner med uforudsigelige miljøer. Disse robotsystemer aktiveres gennem en række modaliteter, herunder temperatur, pneumatisk og hydraulisk tryk og lys.
De er lavet af bløde materialer, herunder hydrogeler, gummi og endda menneskeligt muskuloskeletalvæv. Disse systemer bliver allerede brugt til at give mekanisk stimulering til glatte muskelvævskonstruktioner og er blevet implementeret in vivo i en svinemodel.
Disse systemer er attraktive for senevævsteknik, da:i) deres fleksible, kompatible egenskaber gør det muligt for dem at omslutte anatomiske strukturer, der efterligner konfigurationen af native sener ii) de er i stand til at give multiaksial aktivering og iii) en række af de teknikker, der anvendes i blød robotteknologi overlapper med nuværende senevævskonstruktionspraksis.
Holdet ser fremad og forestiller sig avancerede robotsystemer som platforme, der vil give fysiologisk relevant mekanisk stimulus til senetransplantater før klinisk brug. Der er en række udfordringer at overveje, når avancerede robotsystemer implementeres. For det første vil det være vigtigt for fremtidige eksperimenter at sammenligne teknologier foreslået i denne gennemgang med konventionelle bioreaktorer.
Med udvikling af systemer, der er i stand til at levere multiaksial belastning, vil det være vigtigt at finde metoder til at kvantificere belastning i 3D. Endelig skal avancerede robotsystemer være mere overkommelige og tilgængelige for udbredt implementering.
"Et stigende antal forskergrupper viser, at det er muligt at bruge avanceret robotteknologi i kombination med levende celler og væv til vævsteknologi og bioaktueringsapplikationer. Vi er nu i et spændende stadie, hvor vi kan udforske de forskellige muligheder for at inkorporere disse teknologier i senevævsteknik og undersøge, om de virkelig kan hjælpe med at forbedre kvaliteten af konstruerede senetransplantater," sagde Pierre-Alexis Mouthuy, oversigtsartiklens seniorforfatter.
På lang sigt har disse teknologier potentiale til at forbedre livskvaliteten for enkeltpersoner, ved at mindske smerter og risiko for senereparationsfejl, for sundhedssystemerne, ved at reducere antallet af revisionsoperationer og for økonomien ved at forbedre produktiviteten på arbejdspladsen og sænke sundhedsudgifter. + Udforsk yderligere
Brug af en robotskulder til at dyrke senevæv
 Varme artikler
Varme artikler
-
 DNS-tjeneste annonceret, sætter privatlivets fred førstKredit:Cloudflare En ny tjeneste, der tilbyder beskyttelse af privatlivets fred, når du surfer på nettet, blev annonceret søndag. Sikkerhedsvirksomheden Cloudflare leverer en forbruger-DNS-tjenest
DNS-tjeneste annonceret, sætter privatlivets fred førstKredit:Cloudflare En ny tjeneste, der tilbyder beskyttelse af privatlivets fred, når du surfer på nettet, blev annonceret søndag. Sikkerhedsvirksomheden Cloudflare leverer en forbruger-DNS-tjenest -
 Amerikanerne mener, at falske nyheder er et stort problem, give politikerne skyldenI denne tirsdag, 2. april, 2019, fil foto, en mand gennemser Twitter-kontoen til Alt News, en faktatjek hjemmeside. En ny undersøgelse siger, at halvdelen af amerikanske voksne betragter falske nyhe
Amerikanerne mener, at falske nyheder er et stort problem, give politikerne skyldenI denne tirsdag, 2. april, 2019, fil foto, en mand gennemser Twitter-kontoen til Alt News, en faktatjek hjemmeside. En ny undersøgelse siger, at halvdelen af amerikanske voksne betragter falske nyhe -
 Dårlig uge på sociale medier bliver værre; Twitter hamredeI denne 8. feb. 2018 filbillede, logoet for Twitter vises over en handelspost på gulvet på New York Stock Exchange. Twitter Inc., på fredag, 27. juli rapporterede andet kvartals nettoindtægt på $100,1
Dårlig uge på sociale medier bliver værre; Twitter hamredeI denne 8. feb. 2018 filbillede, logoet for Twitter vises over en handelspost på gulvet på New York Stock Exchange. Twitter Inc., på fredag, 27. juli rapporterede andet kvartals nettoindtægt på $100,1 -
 Samsungs arvinger om korruptionsretssag hænger over telefonproducentenSamsung Group-arvingen Lee Jae-yong ankommer til Seoul Central District Court i håndjern under sin retssag i 2017 Arvingen til Samsung-imperiet vender tilbage for retten i denne uge for en ny rets
Samsungs arvinger om korruptionsretssag hænger over telefonproducentenSamsung Group-arvingen Lee Jae-yong ankommer til Seoul Central District Court i håndjern under sin retssag i 2017 Arvingen til Samsung-imperiet vender tilbage for retten i denne uge for en ny rets
- Plasmoniske pionerer skyder væk i kamp om lyset
- Sådan laver du en Diorama af en Spider Habitat
- Materialisme i ægteskab forbundet med devaluering af ægteskab:undersøgelse
- Kinesiske floder og søer svulmer farligt op som sommerflodens højdepunkter
- Hvem vil lide mest under amerikansk klimaexit?
- Netflix, Instagram slår sig sammen for lettere deling af anbefalinger til bingewatching