


En robot, der tegner kredsløb med ledende blæk for at overleve
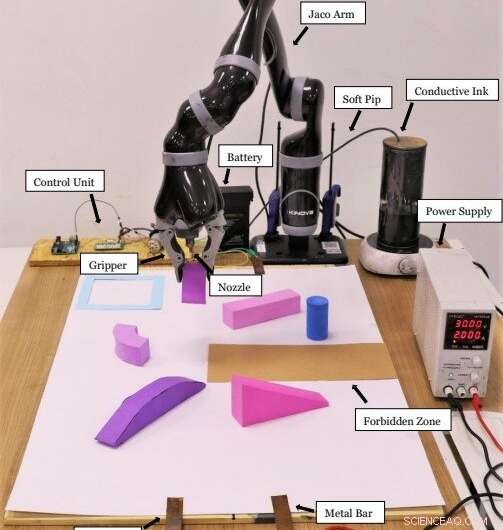
Eksperimentel opsætning af kredsløbstegningsrobotten. Kinova 6DOF Jaco Arm udfører først pick-and-place-handlinger ved den positur, som netværket foreslår. Så bevæger armen sig til en af metalstængerne 5 cm over pappet. ROS-controlleren sender løbende waypoints for kredsløbsstien beregnet ud fra 3D-stiplanlægningsalgoritmen. En Arduino modtager derefter armens tilstand gennem ROS, og sætter tænd/sluk for den peristaltiske pumpe for at kontrollere blækstrømmen. Forbindelsen begynder at vise ledningsevne, efter at blækket tørrer (30 minutter). Kredit:Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, Omarrangering af miljøet for at maksimere energien med en tegning af et robotkredsløb. arXiv:2111.08147v1 [cs.RO], https://arxiv.org/abs/2111.08147
Nylige teknologiske fremskridt har banet vejen for skabelsen af stadig mere sofistikerede robotsystemer designet til selvstændigt at udføre missioner i forskellige velkendte og ukendte miljøer. Robotter, der er beregnet til at fungere i usikre eller fjerntliggende miljøer, kunne have stor gavn af evnen til aktivt at erhverve elektrisk strøm fra deres omgivelser.
Forskere ved Worcester Polytechnic Institute, Imperial College London og University of Illinois Urbana Champaign har for nylig udviklet et nyt robotsystem, der visuelt kan omarrangere sine omgivelser for at modtage den maksimale mængde energi fra en given strømkilde. Denne robot, der er præsenteret i et papir, der er forudgivet på arXiv og skal præsenteres på IEEE International Conference on Robotics and Biomimetics, arbejder ved at tegne elektriske kredsløb ved hjælp af ledende blæk.
"Vores PLOS ONE arbejdet startede som et ganske filosofisk tankeeksperiment," fortalte Andre Rosendo, professoren, der udførte undersøgelsen, til TechXplore. "Nietzsche hævder, at menneskets oprindelige instinkt er magt, og overlevelse er blot en betingelse, som vi ikke kunne nå det. endelige mål. Baseret på denne idé begyndte vi at udtænke eksperimentelle indstillinger, hvor vores robot ikke kun kunne handle for at overleve, men for at trives."
I deres første undersøgelse med fokus på dette emne forsøgte Andre Rosendo, Xianglong Tan og Weijie Lyu at udtænke et system, der kunne drive sig selv ved blot at male elektriske kredsløb. I deres nye arbejde kombinerede de dette kredsløbsprintsystem med en robotgriber, hvilket skabte en robot, der kan udføre et repertoire af handlinger, der sigter mod at opnå større kraft (dvs. højere spændinger) fra omgivelserne og dermed overleve i ugunstige miljøer.
Holdet testede deres robot i simuleringer af forskellige scenarier i den virkelige verden, inklusive opgaver, hvor den skulle undgå fysiske forhindringer eller områder, der ville afbryde dens tegnede kredsløb. Derefter testede de også robotten i en virkelig verden for yderligere at evaluere dens muligheder.
"Vores robot starter hvert eksperiment med et batteri, og dens energikilde svinder ind, efterhånden som den bevæger sig (og vi 'lækker' den også for at efterligne naturlige energitab på grund af homeostase)," forklarede den studerende Xianglong Tan. "Roboten gennemgår en række virtuelle træningsepisoder, med en rød terminal (VCC), der skal forbindes til en anden rød terminal nær dens krop, og en sort terminal (Ground), der skal matche den sorte, så den nuværende kan flyde mod dets batteri."
For at forhindre deres robot i blot at bevæge sig i en simpel lige linje, tilføjede Rosendo og hans kolleger forhindringer i dens omgivelser, både i simulerede og virkelige forsøg. Nogle af disse forhindringer, såsom skumterninger, kunne robotterne nemt fjerne, mens andre var forbundet til en jordingsplade, der "sugede" den elektriske strøm væk, når et kredsløb rørte ved den.
Holdet fandt ud af, at deres robot hurtigt og effektivt lærte at overvinde disse forhindringer for at overleve og maksimere den modtagne energi. Det betød at omarrangere forhindringer eller bygge bro mellem områder i omgivelserne, som den ikke kunne trække ind.
"Jeg tror, vi tager skridt hen imod adaptiv adfærd for robotter," sagde Rosendo. "Mennesker er i stand til at tilpasse sig, tilpasse deres adfærd, så den matcher den, der kræves i nye situationer, og gradvist forbedres, efterhånden som deres viden modnes. Vi kunne tale om sport, opgaver eller endda rummissioner:før vi er på toppen af vores spil, bruger vi vores indledende bestræbelser på at forstå de nye regler for senere at forbedre og gå videre. Robotter kæmper i dag for at overvinde fejlfunktioner, og at lære at tilpasse sig for at holde sig selv funktionelle er en færdighed, som de bør efterligne fra os."
Den tilpassende robot skabt af Rosendo og hans kolleger kan have adskillige fordele, da den selvstændigt kan maksimere energien i sine omgivelser og kontinuerligt holde sig selv funktionel ved at skabe nye elektriske kredsløb. I fremtiden kan dette seneste arbejde inspirere til udvikling af andre robotsystemer, der kan overleve og trives i komplekse miljøer uden behov for nye kredsløb eller menneskelig overvågning.
"Vi tænker nu på næste skridt for at bygge videre på vores arbejde og holde dette eksperiment interessant, såsom at komplicere opgaven og udtænke et 'batteribytte'-system for at gøre eksperimentet mere realistisk," tilføjede Tan. + Udforsk yderligere
Neuromorf chip reducerer kraftigt strømkravene til rullende robot
© 2022 Science X Network
 Varme artikler
Varme artikler
-
 Google siger, at ingen Indien-lancering for radaraktiveret Pixel 4-smartphoneGoogle har udråbt Motion Sense som en nøglefunktion i sine nye Pixel 4-smartphones Google vil ikke lancere sin nyeste Pixel 4-smartphone i Indien, selskabet har sagt, skuffende forbrugere med en b
Google siger, at ingen Indien-lancering for radaraktiveret Pixel 4-smartphoneGoogle har udråbt Motion Sense som en nøglefunktion i sine nye Pixel 4-smartphones Google vil ikke lancere sin nyeste Pixel 4-smartphone i Indien, selskabet har sagt, skuffende forbrugere med en b -
 Facebooks administrerende direktør skal møde for Kongressen om valutaplanI denne 11. april, 2018, fil foto, Facebooks administrerende direktør Mark Zuckerberg vidner før en House Energy and Commerce-høring på Capitol Hill i Washington om brugen af Facebook-data til at må
Facebooks administrerende direktør skal møde for Kongressen om valutaplanI denne 11. april, 2018, fil foto, Facebooks administrerende direktør Mark Zuckerberg vidner før en House Energy and Commerce-høring på Capitol Hill i Washington om brugen af Facebook-data til at må -
 Irlands plan for elektriske køretøjer vil reducere emissioner, men kan komme til at kosteKredit:CC0 Public Domain Niveauet af emissioner fra Irlands transportsektor er unægtelig højt, hvilket er særligt bekymrende, når man overvejer landets forpligtelse til en fremtid med lavere nivea
Irlands plan for elektriske køretøjer vil reducere emissioner, men kan komme til at kosteKredit:CC0 Public Domain Niveauet af emissioner fra Irlands transportsektor er unægtelig højt, hvilket er særligt bekymrende, når man overvejer landets forpligtelse til en fremtid med lavere nivea -
 Apple lancerer kreditkort, da det er klar til lancering af TV+Apple lægger større vægt på at tilbyde digitalt indhold og tjenester, efterhånden som det engang så sydende smartphonemarked køler af Apple lancerede tirsdag et smartphone-generation kreditkort i
Apple lancerer kreditkort, da det er klar til lancering af TV+Apple lægger større vægt på at tilbyde digitalt indhold og tjenester, efterhånden som det engang så sydende smartphonemarked køler af Apple lancerede tirsdag et smartphone-generation kreditkort i
- Krypteret, one-touch, menneske-maskine interface-teknologi afslører brugerfysiologi
- Lav værktøjerne til at forbinde isiXhosa og isiZulu med den digitale tidsalder
- Forskere rapporterer den første 3D-struktur af DHHC-enzymer
- Læringsveje kan vejlede børn, der savner den bedste start til forbedret læsefærdighed i en alder…
- Hvordan er lavet polyurethanskum?
- Teamet undersøger kollektiv aktivering af et elastisk netværk af minirobotter