


Aquabots:Ultrabløde flydende robotter til biomedicinske og miljømæssige applikationer
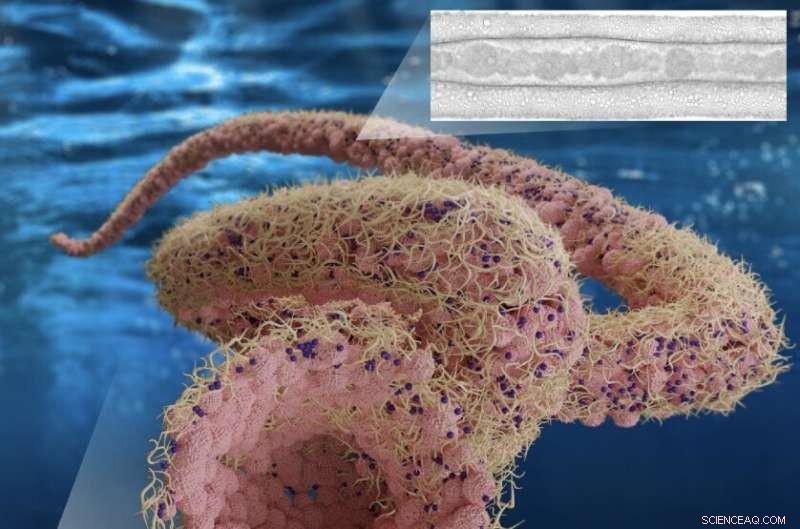
Den forstærkede gengivelse af akvabotterne. Mikrofotografiet i nederste venstre hjørne er akvabotens bøjningsform "σ". Mikrofotografiet i øverste højre hjørne er akvabotens rumstrukturer. Genoptrykt med tilladelse fra {Zhu, Shipei, et al. "Aquabots." ACS nano (2022).} Copyright {2022} American Chemical Society.
I de senere år har robotikere udviklet en lang række robotsystemer med forskellige kropsstrukturer og egenskaber. De fleste af disse robotter er enten lavet af hårde materialer, såsom metaller, eller bløde materialer, såsom silicium og gummiagtige materialer.
Forskere ved Hong Kong University (HKU) og Lawrence Berkeley National Laboratory har for nylig skabt Aquabots, en ny klasse af bløde robotter, der overvejende er lavet af væsker. Da de fleste biologiske systemer overvejende består af vand eller andre vandige opløsninger, introduceres de nye robotter i et papir offentliggjort i ACS Nano , kunne have meget værdifulde biomedicinske og miljømæssige anvendelser.
"Vi har været engageret i udviklingen af adaptive grænsefladesamlinger af materialer ved olie-vand og vand-vand grænsefladen ved hjælp af nanopartikler og polyelektrolytter," fortalte Ho Cheung (Anderson) Shum, Thomas P. Russell og Shipei Zhu TechXplore via e-mail. "Vores idé var at samle de materialer, som grænsefladen og samlingerne låser fast i væskernes former. Formerne er dikteret ved hjælp af ydre kræfter til at generere vilkårlige former eller at bruge flydende 3D-print for at kunne organisere samlingerne rumligt. "
Shum, Russell, Zhu og deres kolleger koblede flydende 3D-printteknikker med vandige tofasede samlinger (ATPS), strategier til samling af 3D-strukturer, for at realisere kunstige konstruktioner, der efterligner biologiske systemer. ATPS er et centralt fokusområde for forskergruppen på HKU ledet af professor Shum.
Idéen til det nylige papir kom, da Zhu, en kandidatstuderende ved HKU på det tidspunkt, begyndte at overveje muligheden for at integrere magnetiske nanopartikler i ATPS-samlingssystemer. Dette ville give dem mulighed for at styre bevægelsen af ATPS-konstruktionerne ved hjælp af eksterne magnetiske felter, som ville producere robotsystemer, der er ultrabløde, fleksible og kan tilpasses til specifikke funktioner.
"Vores papir er kulminationen på Zhus hårde arbejde," sagde Shum og Russell. "Nuværende bløde robotter er lavet til materialer som poly(dimethylsiloxaner), som er gode til fleksibilitet, men som har begrænsninger, såsom i hvor høj grad man kan komprimere dem. Funktionalisering af dem med specifikke kemiske funktioner er vigtigt for opsamling og levering af materialer, men er svært. Aquabots overvinder disse begrænsninger."
Robotterne introduceret af dette team af forskere blev samlet i vandige miljøer. Det betyder, at de kan fungere i vandige miljøer og også kan tilpasses til at udføre specifikke opgaver ved hjælp af vandopløselige forbindelser.
"Aquabots skaber nye muligheder for at replikere bio-inspirerede materialer og funktioner, såsom dynamisk permeabilitet og kompartmentalisering," sagde Russell og Zhu. "Robotterne er helt vandige, med vand indeni og vand udenfor dem. De kan let funktionaliseres til at være biokompatible, så det er ikke svært at forestille sig bio-applikationer, dvs. inde i kroppen, hvor sådanne konstruktioner kan være nyttige."
Aquabot-strukturerne introduceret i holdets seneste papir er meget enkle, da de er en prototype, der demonstrerer, hvordan de kunne samles. I fremtiden vil den samme proces dog kunne bruges til at skabe mere komplekse strukturer, der kan håndtere mere avancerede opgaver.
"Vores undersøgelse viser evnen til at konstruere robotter og udføre robotfunktioner baseret på vandig fremstilling og inspirerer til design af lignende vandige robotter til applikationer, såsom biomedicinsk mikromanipulation," sagde Shum, Russell og Zhu. "Forestil dig at have en simpel rørformet struktur, der har indlejret funktionalitet, der ville give dig mulighed for at fremstille en specifik struktur i kroppen, en selvsamlende robot, der kunne få delene til at gå gennem meget smalle kanaler ind i et større rum, hvor de bløde, fleksible dele kunne derefter samles selv for at udføre en opgave, derefter skilles ad og fjernes,"
I fremtiden kan Aquabots åbne spændende muligheder for adskillige biomedicinske og miljømæssige anvendelser i den virkelige verden. For eksempel kunne de bruges til at levere lægemidler til bestemte steder inde i den menneskelige krop, til biologisk at konstruere menneskeligt væv og til kunstigt at udføre funktionerne i specifikke biologiske systemer.
"Vi forsøger nu at inkorporere en hydrogel i samlingen af robotterne, så vi kan opnå fuldt reversible formændringer," tilføjede Shum. "I vores næste værker ville det også være værd at se nærmere på andre egenskaber og funktioner, der er muliggjort af Aquabot-platformen, udover den proof-of-concept mekanisk manipulation og kemiske reaktioner, der er demonstreret i papiret. Det ville være interessant at kombinere dette med andre mikrofluidiske og robotiske tilgange til nye applikationer." + Udforsk yderligere
En blød magnetisk pixelrobot, der kan programmeres til at tage forskellige former
© 2022 Science X Network
 Varme artikler
Varme artikler
-
 Debat om nye foranstaltninger til beskyttelse af personlige oplysninger i folketællingen overser st…Kredit:Pixabay/CC0 Public Domain Kontrovers omgiver U.S. Census Bureaus nye foranstaltninger til at bevare privatlivets fred, men en ny undersøgelse undersøger, hvordan eksisterende datafejl kan ud
Debat om nye foranstaltninger til beskyttelse af personlige oplysninger i folketællingen overser st…Kredit:Pixabay/CC0 Public Domain Kontrovers omgiver U.S. Census Bureaus nye foranstaltninger til at bevare privatlivets fred, men en ny undersøgelse undersøger, hvordan eksisterende datafejl kan ud -
 Oklahoma pensionsfond rapporterer $4,2 millioner cybertyveriKredit:CC0 Public Domain Embedsmænd med pensionssystemet for pensionerede Oklahoma Highway Patrol troopers og andre statslige retshåndhævere siger, at FBI efterforsker efter computerhackere stjal
Oklahoma pensionsfond rapporterer $4,2 millioner cybertyveriKredit:CC0 Public Domain Embedsmænd med pensionssystemet for pensionerede Oklahoma Highway Patrol troopers og andre statslige retshåndhævere siger, at FBI efterforsker efter computerhackere stjal -
 Kinas Weibo-side går tilbage på homocensur efter ramaskrigI denne 15. april, 2018, foto udgivet af Jiangsu Tongtian Volunteer Group, en LGBT-gruppe førte mere end 100 mennesker til at deltage i et stort maraton i byen Nanjing, holder regnbueflag for at øge b
Kinas Weibo-side går tilbage på homocensur efter ramaskrigI denne 15. april, 2018, foto udgivet af Jiangsu Tongtian Volunteer Group, en LGBT-gruppe førte mere end 100 mennesker til at deltage i et stort maraton i byen Nanjing, holder regnbueflag for at øge b -
 Eksklusiv dating-app til berømtheder og influencers:Hvorfor Raya er blevet kaldt Tinder-verdenens I…Kredit:Shutterstock I 2020 tweetede Sharon Stone, at hendes Bumble-datingprofil var blevet lukket på grund af, at brugere rapporterede kontoen som falsk. På mindre end 24 timer havde Bumble genopre
Eksklusiv dating-app til berømtheder og influencers:Hvorfor Raya er blevet kaldt Tinder-verdenens I…Kredit:Shutterstock I 2020 tweetede Sharon Stone, at hendes Bumble-datingprofil var blevet lukket på grund af, at brugere rapporterede kontoen som falsk. På mindre end 24 timer havde Bumble genopre
- Efter jordskælvet mellem Iran og Irak, seismologer arbejder på at udfylde fejlkort over regionen
- Sådan beregnes batteri watt-timer
- Højere niveauer af organiske forurenende stoffer findes i boliger i nærheden af naturgasbrønde,…
- Sådan finder du radius for en halvcirkel
- Kinas emissioner overstiger nu alle de udviklede verdener tilsammen
- Skærende forurening forårsager ikke global opvarmning, undersøgelse finder