


Hvordan en slank, slangelignende robot kunne give læger nye måder at redde liv på
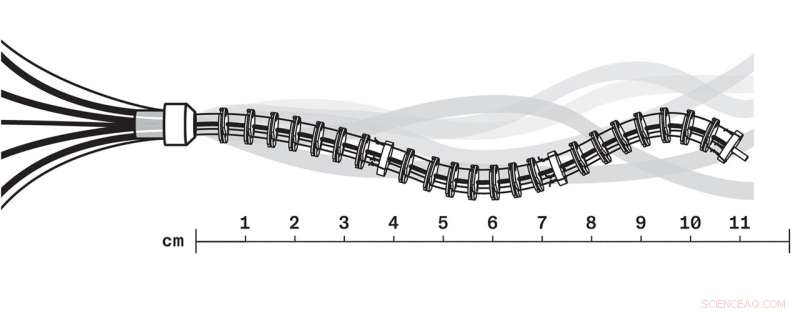
De "senedrevne" kontinuumsrobotter, der er afbildet her, er i virkeligheden omkring syv millimeter i diameter og er bygget i sektioner, der kan variere i længden fra 15 til 70 millimeter. Andre modeller kan være endnu smallere. Alle udviser en tentakellignende bevægelse. Kredit:University of Toronto
Jessica Burgner-Kahrs, direktøren for Continuum Robotics Lab ved University of Toronto Mississauga, og hendes team bygger meget slanke, fleksible og strækbare robotter, nogle få millimeter i diameter, til brug i kirurgi og industri. Du kan kalde det "zoobotik".
I modsætning til humanoide robotter har de såkaldte kontinuum-robotter lange, lemmerløse kroppe – ikke ulig en slanges – som giver dem adgang til svært tilgængelige steder.
Overvej en neurokirurg, der skal fjerne en hjernetumor. Ved at bruge et traditionelt, stift kirurgisk værktøj skal kirurgen nå kræftmassen ved at følge en lige vej ind i hjernen og risikere at stikke igennem – og beskadige – vitalt væv.
Burgner-Kahrs, som er lektor i matematiske og beregningsvidenskabelige videnskaber ved U of T Mississauga, forestiller sig en dag, hvor en af hendes slangelignende robotter, guidet af en kirurg, ville være i stand til at tage en snoet vej rundt om det vitale væv, men stadig nå præcise operationssted. Tidligere inoperable hjernetumorer kan pludselig blive operable.
"Det kan revolutionere operationen," siger hun.
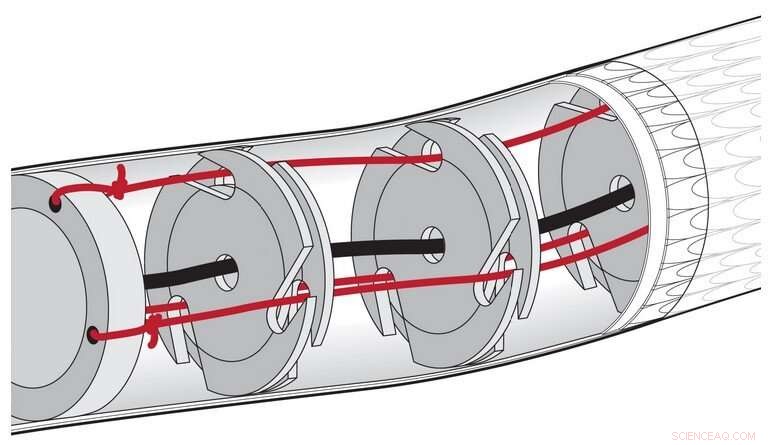
Tråde, der løber gennem robottens "krop", fastgøres til en tykkere skive for enden af hvert kropssegment. Disse tråde trækkes for at styre individuelle segmenter af robotten og bøje dem i forskellige retninger. Magneter inden i hver disk, arrangeret med skiftende polariteter, sikrer, at diskene forbliver lige langt, uanset længden af robotsegmentet. Dette hjælper robotten til at bøje som ønsket og til at krydse en krum bane i en "følg-lederen"-bevægelse - den slangelignende "krop" følger "hovedets" vej. Laboratoriet har udviklet en kappe af overlappende skæl, der er klemt mellem to lag silikone. Når der påføres et vakuum mellem silikonelagene, bliver den normalt fleksible robot stiv. Kredit:Colin Hayes
Burgner-Kahrs, en datalog og maskiningeniør, siger, at hendes laboratorium også udvikler en mere avanceret generation af kontinuumsrobotter, der er udstyret med sensorer og delvist kan styre sig selv. En kirurg ville skulle fjernbetjene robotten med en computer, men robotten ville vide, hvordan man undgår forhindringer og genkender dens destination. En kirurg kunne indsætte en af disse robotter til at indsamle en vævsprøve fra maven, for eksempel, eller injicere et kræftlægemiddel direkte i en tumor i lungerne.
Der er også anvendelser uden for den menneskelige krop.
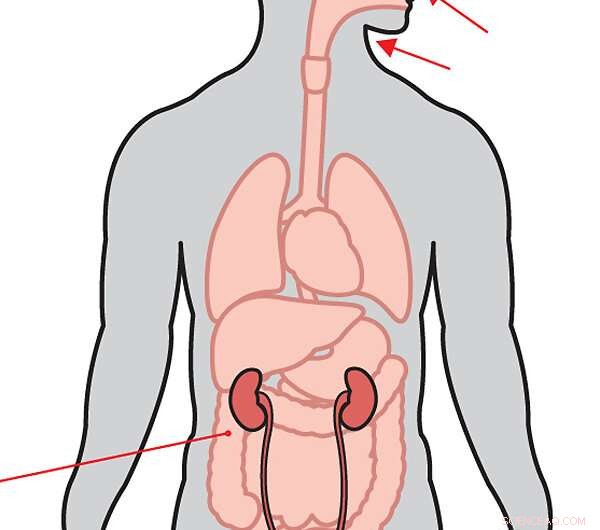
Burgner-Kahrs udvikler forskellige slags kontinuum-robotter, der kan bruges i nøglehulsoperationer, hvilket forårsager endnu mindre traumer for patienter end de nuværende minimalt invasive kirurgiske teknikker. Kredit:Colin Hayes
En kontinuumrobot kunne glide gennem det indre af en jetmotor og inspicere den for skade. Laboratoriet eksperimenterer med nye former, der er endnu mere behændige og strækbare. Et nyere design med potentielle søge- og redningsapplikationer er inspireret af origami:det er meget let og kan forlænges op til 10 gange længere end andre designs.
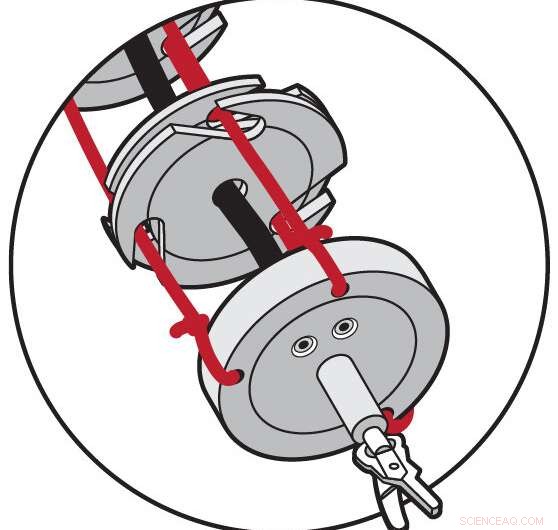
Robotterne kunne udstyres med kameraer, så operatøren kan se, hvor robotten er. Små kirurgiske værktøjer kan monteres efter behov, herunder pincet, en laser eller en sugeanordning. Kredit:Colin Hayes
Næste generations kontinuumsrobotter
For at udvikle robotter, der kan bruges sikkert i en række medicinske og andre applikationer, sigter Burgner-Kahrs på at besvare følgende spørgsmål:
- Hvordan kan vi kontrollere kontinuum-robotter, så de bevæger sig endnu mere præcist gennem begrænsede og snoede miljøer?
- Hvordan kan vi designe en mere intuitiv grænseflade mellem menneske og robot? Kan vi opnå en fuldstændig autonom robot?
- Hvordan kan vi bruge flere kontinuumsrobotter i tandem til at fuldføre en opgave i fællesskab?
Hvordan en slank, slangelignende robot kunne give læger nye måder at redde liv på
 Varme artikler
Varme artikler
-
 Wafer-tynde cykler, hurtige shorts, go-faster trainers:kontroversiel teknologi i sportKredit:CC0 Public Domain Da den kenyanske løber Eliud Kipchoge blev det første menneske til at løbe et maraton på under to timer som en del af den nylige INEOS 1:59 Project Challenge, dette var ud
Wafer-tynde cykler, hurtige shorts, go-faster trainers:kontroversiel teknologi i sportKredit:CC0 Public Domain Da den kenyanske løber Eliud Kipchoge blev det første menneske til at løbe et maraton på under to timer som en del af den nylige INEOS 1:59 Project Challenge, dette var ud -
 Gør dig klar til æraen med hypersonisk flyvning - med fem gange lydens hastighedKredit:US Air Force Det slanke fly, virkelig mere raket end fly, faldt fra vingen på en B-52, før den skød gennem himlen over Point Mugu Sea Range ud for Californiens kyst, efterlader en lang, hvi
Gør dig klar til æraen med hypersonisk flyvning - med fem gange lydens hastighedKredit:US Air Force Det slanke fly, virkelig mere raket end fly, faldt fra vingen på en B-52, før den skød gennem himlen over Point Mugu Sea Range ud for Californiens kyst, efterlader en lang, hvi -
 Amazon til stille Alexas cacklingAmazon har lovet at holde den virtuelle assistent Alexa fra at spontant kække, give folk uhyggelige følelser om, hvad den kunstige intelligens kan planlægge Amazon lovede onsdag at holde den virtu
Amazon til stille Alexas cacklingAmazon har lovet at holde den virtuelle assistent Alexa fra at spontant kække, give folk uhyggelige følelser om, hvad den kunstige intelligens kan planlægge Amazon lovede onsdag at holde den virtu -
 Et 5G-standardnik vinder tillid som et vigtigt skridt til primetimeKredit:CC0 Public Domain Et 3GPP TSG #80 plenarmøde har godkendt færdiggørelsen af den selvstændige (SA) Release 15 (REL-15), 5G specifikationer. 3GPP står for 3rd Generation Partnership Project
Et 5G-standardnik vinder tillid som et vigtigt skridt til primetimeKredit:CC0 Public Domain Et 3GPP TSG #80 plenarmøde har godkendt færdiggørelsen af den selvstændige (SA) Release 15 (REL-15), 5G specifikationer. 3GPP står for 3rd Generation Partnership Project
- Hold dit skrald væk fra Trash Vortex i Stillehavet
- Flok dinosaurer fundet under jorden ved Lightning Ridge
- Udforske synergien mellem vestlige områder og monsunen på Mount Everest, samt deres klima- og milj…
- NASA ser på nedbørsraterne i den tropiske cyklon Yvette
- Nationens mest ambitiøse projekt for at rydde op i atomvåbenaffald er gået i stå
- Forskere afslører oprindelsen af Suns hvirvlende spicules