


Hvordan miljøegenskaber kan øge robotbevidstheden
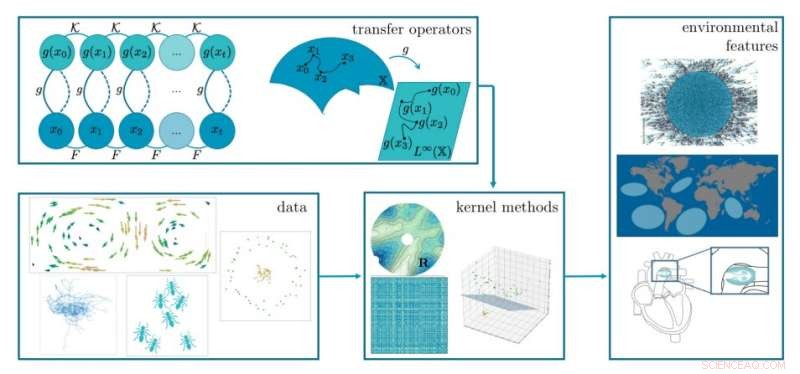
Diagram over samspil mellem data, overførselsoperatører, kernemetoder og miljøegenskaber. Overførselsoperatorer repræsenterer dynamiske systemer, hvor en tilstand x ∈ X løftes til et rum L∞X og g(x) giver systemets fysiske egenskaber. Mange systemer er defineret af data, der udviser komplekse mønstre, såsom to indlejrede ringe, strømme i oceaner, taxibaner og biologisk adfærd. Kernelmetoder transformerer disse data til et alternativt rum med brug af kernefunktioner. Data er så lettere at fortolke, f.eks. ved at adskille to indlejrede ringe eller ved at oprette en Gram-matrix til brug i en kernealgoritme. Overførselsoperatører er repræsenteret gennem kernemetoder ved at indlejre dynamiske systemer i et kernerum, R. Kernelalgoritmer udvinder miljøegenskaber fra overførselsoperatører, såsom hvor mennesker har tendens til at samles i menneskemængder, områder med gyres i havene eller mønstre af blodgennemstrømning i hjerter . Kredit:Salam, Edwards og Hsieh.
I de seneste år har robotikere skabt en række systemer, der med tiden kunne fungere i virkelige miljøer. Da de fleste omgivelser i den virkelige verden, især offentlige rum, er dynamiske og uforudsigelige, bør robotter kunne opnå en god forståelse af deres omgivelser for effektivt at navigere i disse miljøer.
Forskere ved University of Pennsylvanias GRASP Laboratory har for nylig udført en undersøgelse, der undersøger, hvordan funktioner relateret til et givet miljø kan forbedre en robots bevidsthed og dens evne til at navigere i deres omgivelser. Deres papir, der var forududgivet på arXiv, var baseret på to af deres tidligere forskningsindsats.
Den første af disse tidligere undersøgelser introducerede en række strategier, der brugte miljøinformation til at forbedre en robots autonomi i at konkurrere med en specifik opgave, nemlig lokalisering af kilden til et kemikalieudslip i turbulente strømme. Som en del af den anden undersøgelse introducerede holdet på den anden side nye kontrolpolitikker på agentniveau, der udnyttede miljøegenskaber eller støj til at opretholde en ønsket rumlig fordeling af detsende robotagent i et geofysisk flowmiljø.
"Vores tidligere værker fokuserede på lagrangiske sammenhængende strukturer, et vigtigt træk ved dynamiske systemer i mange applikationer såsom oceanografi og vejrudsigelse, og hvordan de kan bruges i robotteknologi," fortalte Tahiya Salam, en af forskerne, der udførte undersøgelsen, TechXplore. "Vores nye arbejde fokuserer på, hvordan en lignende funktion, sammenhængende sæt, kan læres online og nye tilgange til, hvordan disse funktioner kan bruges i robotapplikationer, såsom crowd monitoring i bymiljøer og energieffektiv navigation i vand."
I deres nye undersøgelse brugte Salam og de andre forskere ved GRASP Laboratory en række teknikker, der kombinerer globale dynamiktilgange med maskinlæring. I denne sammenhæng refererer udtrykket "global dynamik" til den overordnede dynamik i et givet miljø og de træk, der karakteriserer denne dynamik.
"Den teknik, vi brugte, gjorde det muligt for os at lære globale funktioner fra data, der blev indsamlet fra de miljøer, robotter opererer i," forklarede Salam. "De globale funktioner, kaldet kohærente sæt, har interessante egenskaber; de repræsenterer nemlig regioner, der spredes meget langsomt. Ved at bruge disse oplysninger om regioner, der spredes meget langsomt, kan robotter udnytte disse funktioner til beslutningstagning."
Salam og hendes kolleger beregnede disse såkaldte 'kohærente sæt' online ved hjælp af maskinlæringsteknikker. Efterfølgende designede de en ramme, der kunne styre en robots adfærd baseret på de miljømæssige egenskaber, de beregnede.
"Vi fandt en måde at beregne sammenhængende sæt i realtid uden at have detaljerede oplysninger om en model, der beskriver miljøet," forklarede Salam. "Derudover var vi i stand til at bruge disse sammenhængende sæt på smarte måder til at opnå smart robotadfærd."
Salam og hendes kolleger evaluerede den ramme, de udviklede i en række eksperimenter og fandt ud af, at den klarede sig betydeligt bedre end offline metoder til beregning af miljøegenskaber. Holdet demonstrerede specifikt effektiviteten af den model, de udviklede, i to scenarier, hvor robotter overvågede bymiljøer og navigerede på vandet.
I fremtiden vil rammen introduceret af dette team af forskere i sidste ende kunne hjælpe med at forbedre både eksisterende og nye robotters evne til at navigere i ukendte og dynamiske miljøer. I mellemtiden planlægger Salam yderligere at udforske potentialet ved at bruge miljøfunktioner til at forbedre robotnavigation.
"I mine næste studier vil jeg fortsætte med at undersøge teknikker, der forbinder global dynamik og maskinlæring i mere generelle rammer," tilføjede Salam. "For eksempel vil jeg gerne repræsentere den globale dynamik i vilkårlige miljøer fra sensormålinger indsamlet af robotter."
 Varme artikler
Varme artikler
-
 Ready Player One – vi er overraskende tæt på at realisere netop et sådant VR-miljøKredit:Samtalen Jeg var så heldig at se en forhåndsvisning af Klar Player One , Steven Spielbergs tilpasning af Ernest Clines futuristiske roman. Det blæste mig væk. Det, der virkelig fangede mi
Ready Player One – vi er overraskende tæt på at realisere netop et sådant VR-miljøKredit:Samtalen Jeg var så heldig at se en forhåndsvisning af Klar Player One , Steven Spielbergs tilpasning af Ernest Clines futuristiske roman. Det blæste mig væk. Det, der virkelig fangede mi -
 DNA-origami går sammen med molekylære motorer for at bygge maskiner i nanoskalaKredit:Harvard University Hvert år, robotter bliver mere og mere livagtige. Soldrevne bier flyver på smidige vinger, humanoider stikker baglæns, og hold af fodboldbots planlægger, hvordan man drib
DNA-origami går sammen med molekylære motorer for at bygge maskiner i nanoskalaKredit:Harvard University Hvert år, robotter bliver mere og mere livagtige. Soldrevne bier flyver på smidige vinger, humanoider stikker baglæns, og hold af fodboldbots planlægger, hvordan man drib -
 Uber opgiver autonome køretøjstestrettigheder i Californien.Uber vil ikke forny sin tilladelse til at teste autonome køretøjer på Californiens offentlige veje, når den udløber lørdag. Og virksomheden vil have nogle forklaringer at gøre, hvis det ønsker at få e
Uber opgiver autonome køretøjstestrettigheder i Californien.Uber vil ikke forny sin tilladelse til at teste autonome køretøjer på Californiens offentlige veje, når den udløber lørdag. Og virksomheden vil have nogle forklaringer at gøre, hvis det ønsker at få e -
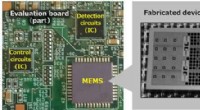 Højfølsomt MEMS-accelerometer med lav effekt til at detektere ekstremt svagt underlag og bygningsv…Figur 1. Kontrol IC, detektion IC og MEMS enhed i accelerometeret (venstre), bevægende masse inde i MEMS-enheden (højre). Kredit:Hitachi Hitachi Ltd. annoncerede i dag udviklingen af et højfølso
Højfølsomt MEMS-accelerometer med lav effekt til at detektere ekstremt svagt underlag og bygningsv…Figur 1. Kontrol IC, detektion IC og MEMS enhed i accelerometeret (venstre), bevægende masse inde i MEMS-enheden (højre). Kredit:Hitachi Hitachi Ltd. annoncerede i dag udviklingen af et højfølso
- Et nyt antibiotisk bindingssted fundet i ribosomet
- Hvordan kan Jordens Rotation & Tilt påvirke det globale klima?
- Fyrværkeri i rummet:NASAs tvillingeundersøgelse udforsker genekspression
- New Zealand siger, at Huawei forbyder ikke, fordi det er kinesisk
- Turbulens og tilgængelighed af næringsstoffer driver ændringer i Rødehavets mikrober
- Uber medicin levering til kræftpatienter