


Række, række, række dine bots:Men er de synkroniserede?
Inden for robotteknologi er det en fængslende udfordring at opnå synkroniseret adfærd blandt flere autonome agenter. Forestil dig en flåde af droner, der udfører en hypnotiserende luftballet, eller en gruppe robotter, der samarbejder problemfrit i et produktionsbånd. Selvom disse scenarier kan virke futuristiske, er jagten på synkronisering allerede i gang, med betydelige implikationer for forskellige områder såsom autonom transport, kooperativ robotik og menneske-robot-interaktion. Men rejsen mod at opnå perfekt synkronisering er fyldt med forhindringer og kompleksiteter, der kræver nøje overvejelse.
Udfordringer i synkronisering
1. Kommunikation og dataforsinkelse :At muliggøre problemfri kommunikation mellem flere bots er afgørende for synkronisering. Trådløse kommunikationskanaler kan dog være upålidelige, og forsinkelser i datatransmission kan medføre uoverensstemmelser i koordineringen. Selv små variationer i kommunikationstiming kan få bots til at glide ud af synkronisering, især når de udfører opgaver, der kræver høj præcision.
2. Dynamiske miljøer :Virkelige miljøer er dynamiske og uforudsigelige. Bots, der opererer i skiftende terræn, varierende vejrforhold eller i nærværelse af forhindringer, kan opleve uventede forstyrrelser. Disse forstyrrelser kan bringe synkroniseringsbestræbelser i uorden, hvilket kræver adaptive algoritmer for at opretholde koordinationen under udfordrende omstændigheder.
3. Diverse Bot-kapaciteter :Bots i en synkroniseret gruppe kan have forskellige fysiske egenskaber, sensorkapaciteter og behandlingskapaciteter. Disse forskelle kan introducere variationer i ydeevnen, hvilket gør det udfordrende at opnå ensartet synkronisering.
Strategier til synkronisering
1. Centraliseret kontrol :I denne tilgang orkestrerer en central enhed, såsom en master-bot eller en koordinerende server, bevægelserne og handlingerne af bots på en hierarkisk måde. Dette sikrer koordinering, men kan introducere et enkelt fejlpunkt og begrænse skalerbarheden, efterhånden som antallet af bots stiger.
2. Decentral kontrol :Med decentral kontrol fungerer hver bot autonomt, afhængig af lokal kommunikation og informationsudveksling med nabobots. Denne tilgang tilbyder robusthed og tilpasningsevne, men kan være mere udfordrende at designe og implementere, idet den kræver algoritmer, der muliggør selvorganisering og konsensus blandt decentraliserede agenter.
3. Hybridkontrol :Hybrid kontroltilgange kombinerer elementer af både centraliseret og decentral kontrol, hvilket skaber en balance mellem ydeevne og skalerbarhed. For eksempel kan en centraliseret controller give koordinering på højt niveau, mens decentraliserede algoritmer tillader bots at foretage finjusterede justeringer baseret på lokale observationer.
Applikationer og fremtidige retningslinjer
1. Autonom transport :Synkronisering spiller en afgørende rolle i koordineringen af selvkørende køretøjer, hvilket giver dem mulighed for at navigere sikkert og effektivt i trafikken, mens de holder sikre afstande fra hinanden.
2. Kooperativ robotik :Synkroniserede robotter kan samarbejde effektivt om at løfte tunge genstande, udføre monteringsopgaver eller udføre komplekse fælles handlinger, hvilket øger produktiviteten og sikkerheden i industrielle omgivelser.
3. Menneske-robotinteraktion :Velsynkroniserede robotter kan interagere mere effektivt og naturligt med mennesker, hvilket gør dem til bedre partnere inden for forskellige domæner såsom sundhedspleje, personlig assistance og kundeservice.
Efterhånden som robotteknologien udvikler sig, fortsætter forskere og ingeniører med at forfine og innovere synkroniseringsteknikker og skubbe grænserne for, hvad der er opnåeligt i koordineret adfærd blandt autonome agenter. Ved at løse udfordringerne med kommunikation, dynamiske miljøer og forskellige bot-kapaciteter, vil synkronisering blive stadig vigtigere for at frigøre robotternes fulde potentiale i forskellige applikationer.
 Varme artikler
Varme artikler
-
 Teachable Machine 2.0 udvider maskinlæringsoplevelsenKredit:Google Hvad, er det så nemt at forstå det grundlæggende i maskinlæring? Gode nyheder fra Googles Teachable Machine-team. Tidligere, the Teachable Machine gav lektioner om, hvordan AI fung
Teachable Machine 2.0 udvider maskinlæringsoplevelsenKredit:Google Hvad, er det så nemt at forstå det grundlæggende i maskinlæring? Gode nyheder fra Googles Teachable Machine-team. Tidligere, the Teachable Machine gav lektioner om, hvordan AI fung -
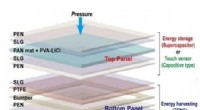 Gennemsigtigt og fleksibelt batteri til strømproduktion og opbevaringKonceptkort over gennemsigtige energienheder. Kredit:DGIST Forskellige anvendelser af elektronik og enheder, der kan tilsluttes hud, forventes med udviklingen af et gennemsigtigt batteri, der bå
Gennemsigtigt og fleksibelt batteri til strømproduktion og opbevaringKonceptkort over gennemsigtige energienheder. Kredit:DGIST Forskellige anvendelser af elektronik og enheder, der kan tilsluttes hud, forventes med udviklingen af et gennemsigtigt batteri, der bå -
 Uber genoptager tests af autonome køretøjer i PittsburghI denne 15. marts, 2017, fil foto, et skilt markerer et afhentningssted for Ubers bilservice i LaGuardia Lufthavn i New York. Uber vil genoptage testning af autonome køretøjer i et område nær Downtown
Uber genoptager tests af autonome køretøjer i PittsburghI denne 15. marts, 2017, fil foto, et skilt markerer et afhentningssted for Ubers bilservice i LaGuardia Lufthavn i New York. Uber vil genoptage testning af autonome køretøjer i et område nær Downtown -
 Kryptofirmaer siger, at amerikanske sanktioner begrænser brugen af privatlivssoftwareFinansminister Janet Yellen taler om økonomien under en pressekonference i finansministeriet den 28. juli 2022 i Washington. Finansministeriet står over for tilbageslag fra kryptovalutaindustrien på g
Kryptofirmaer siger, at amerikanske sanktioner begrænser brugen af privatlivssoftwareFinansminister Janet Yellen taler om økonomien under en pressekonference i finansministeriet den 28. juli 2022 i Washington. Finansministeriet står over for tilbageslag fra kryptovalutaindustrien på g
- Stater vokser færre træer. Skovejere siger, at det er et problem
- Volvos Polestar løfter sløret for en elbil udråbt som Tesla-rival
- Video:Overflyvning af Plutos majestætiske bjerge og iskolde sletter
- Er quantum dot tv - og deres giftige ingredienser - faktisk bedre for miljøet?
- Langlivede Mars-rover Opportunity bliver ved med at finde overraskelser
- Spontan Bose-Einstein kondensering af excitoner