


Bivirkningerne af kvantefejlkorrektion og hvordan man håndterer dem
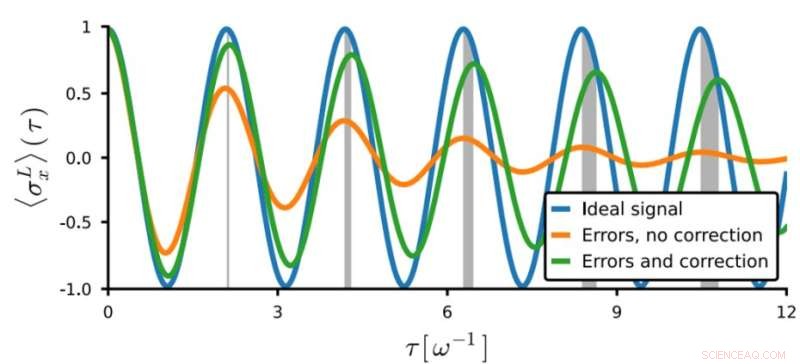
Dynamikken af en kvantesensor. Fejl som støj forårsager en dæmpning af signalet i forhold til det ideelle tilfælde. Kvantefejlkorrektion genopretter væsentlige dele af den tabte signalstyrke, men forskyder også registreringsfrekvensen, hvilket fører til den progressive opbygning af en bias (vist som grå søjler). Tilpasset fra Rojkov et al. Fys. Rev. Lett . 128, 140503 (2022).
Det er veletableret, at kvantefejlkorrektion kan forbedre ydeevnen af kvantesensorer. Men nyt teoriarbejde advarer om, at tilgangen uventet også kan give anledning til unøjagtige og vildledende resultater - og viser, hvordan man kan rette op på disse mangler.
Kvantesystemer kan interagere med hinanden og med deres omgivelser på måder, der er fundamentalt forskellige fra deres klassiske modstykker. I en kvantesensor udnyttes de særlige forhold ved disse interaktioner til at opnå karakteristisk information om miljøet i kvantesystemet - for eksempel styrken af et magnetisk og elektrisk felt, som det er nedsænket i. Det er afgørende, når en sådan enhed på passende måde udnytter kvantemekanikkens love, så kan dens følsomhed overgå, hvad der er muligt, selv i princippet, med konventionelle, klassiske teknologier.
Desværre er kvantesensorer udsøgt følsomme ikke kun over for de fysiske mængder af interesse, men også over for støj. En måde at undertrykke disse uønskede bidrag på er at anvende ordninger, der kollektivt er kendt som kvantefejlkorrektion (QEC). Denne tilgang tiltrækker betydelig og stigende opmærksomhed, da den kan muliggøre praktiske højpræcisions kvantesensorer i en bredere række af applikationer, end det er muligt i dag. Men fordelene ved fejlkorrigeret kvanteregistrering kommer med store potentielle bivirkninger, som et team ledet af Florentin Reiter, en Ambizione-stipendiat fra Swiss National Science Foundation, der arbejder i gruppen af Jonathan Home på Institute for Quantum Electronics, nu har fundet ud af. . Skrivning i Physical Review Letters , rapporterer de teoretisk arbejde, hvor de viser, at QEC i realistiske omgivelser kan forvrænge outputtet af kvantesensorer og måske endda føre til ufysiske resultater. Men ikke alt er tabt; forskerne beskriver også procedurer for, hvordan man genskaber de korrekte resultater.
Kører af sporet
Ved anvendelse af QEC til kvanteregistrering korrigeres fejl gentagne gange, efterhånden som sensoren indhenter information om målmængden. Som en analogi kan du forestille dig en bil, der bliver ved med at afvige fra midten af den vognbane, den kører i. I det ideelle tilfælde korrigeres afdriften ved konstant modstyring. I det tilsvarende scenarie for kvanteregistrering har det vist sig, at ved konstant - eller meget hyppig - fejlkorrektion kan de skadelige virkninger af støj undertrykkes fuldstændigt, i det mindste i princippet. Historien er noget anderledes, når føreren af praktiske årsager kun kan udføre korrigerende indgreb med rattet på bestemte tidspunkter. Så, som erfaringen fortæller os, skal rækkefølgen af at køre fremad og foretage korrigerende bevægelser finjusteres. Hvis rækkefølgen ikke betød noget, så kunne bilisten simpelthen udføre alle styremanøvrer hjemme i garagen og derefter trygt sætte foden ned på speederen. Grunden til, at dette ikke virker, er, at rotation og translation ikke er kommutative - rækkefølgen, hvori handlingerne af den ene eller den anden type udføres, ændrer resultatet.
For kvantesensorer kan der opstå noget af en lignende situation med ikke-pendlende handlinger, specifikt for "følehandlingen" og "fejlhandlingen". Førstnævnte beskrives af den Hamiltonske operatør af sensoren, sidstnævnte af fejloperatører. Nu har Ivan Rojkov, en doktorgradsforsker, der arbejder ved ETH med Reiter og med samarbejdspartnere ved Massachusetts Institute of Technology (MIT), fundet ud af, at sensoroutputtet oplever en systematisk bias - eller "drift" - når der er en forsinkelse mellem en fejl og den efterfølgende korrektion. Afhængigt af længden af denne forsinkelsestid bliver dynamikken i kvantesystemet, som ideelt set burde være styret af Hamilton-operatoren alene, forurenet af interferens fra fejloperatorerne. Resultatet er, at sensoren under forsinkelsen typisk opnår mindre information om mængden af interesse, såsom et magnetisk eller elektrisk felt, sammenlignet med en situation, hvor der ikke er opstået fejl. Disse forskellige hastigheder i informationsopsamlingen resulterer så i en forvrængning af outputtet.
Sansisk sansning
Denne QEC-inducerede skævhed har betydning. Hvis der ikke tages højde for, kan estimater for det minimumssignal, som kvantesensoren kan detektere, ende med at blive alt for optimistiske, som Rojkov et al. at vise. For eksperimenter, der skubber grænserne for præcision, er sådanne forkerte skøn særligt vildledende. Men holdet giver også en flugtvej for at overvinde skævheden. Mængden af bias introduceret af finite-rate QEC kan beregnes, og gennem passende foranstaltninger kan korrigeres i efterbehandlingen, så sensoroutputtet igen giver perfekt mening. At tage højde for, at QEC kan give anledning til systematiske skift, kan også hjælpe med at udtænke den ideelle sensingsprotokol forud for målingen.
I betragtning af, at effekten identificeret i dette arbejde er til stede i forskellige almindelige fejlkorrigerede kvantesensorer, er disse resultater sat til at give et importbidrag til at finjustere den højeste præcision fra en bred vifte af kvantesensorer og holde dem på sporet til at levere på deres løfte om at føre os til regimer, der ikke kan udforskes med klassiske sensorer. + Udforsk yderligere
Kvantesystemer retter sig selv
Sidste artikelForskere finder en ny måde at måle flyvende baseballs på
Næste artikelAstrofysikere teoretiserer en ny type neutronstjerne
 Varme artikler
Varme artikler
-
 Hollow-core fiber skaber udsigt til næste generations videnskabelige instrumenterNANF polarisering holder. Kredit:University of Southampton De nye fibres seneste fremskridt, udgivet i denne uge i Natur fotonik , har understreget teknologiens potentiale for næste generations
Hollow-core fiber skaber udsigt til næste generations videnskabelige instrumenterNANF polarisering holder. Kredit:University of Southampton De nye fibres seneste fremskridt, udgivet i denne uge i Natur fotonik , har understreget teknologiens potentiale for næste generations -
 Neutronklyngeeffekt i atomreaktorer demonstreret for første gangReaktoroperatør Nicholas Thompson fra Los Alamos National Laboratory hjælper med at opsætte neutronklyngemålingerne på Walthousen Reactor Critical Facility på Rensselaer Polytechnic Institute i Schene
Neutronklyngeeffekt i atomreaktorer demonstreret for første gangReaktoroperatør Nicholas Thompson fra Los Alamos National Laboratory hjælper med at opsætte neutronklyngemålingerne på Walthousen Reactor Critical Facility på Rensselaer Polytechnic Institute i Schene -
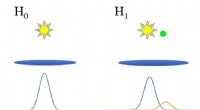 En ny teori til at teste hypoteser og metoder til exoplanetdetektionEt optisk billeddannelsessystem (modelleret som en tynd linse) bruges til at skelne mellem to hypoteser. Hypotese H0:kun stjernen er til stede. Hypotese H1:der er et stjerne-planet system til stede, h
En ny teori til at teste hypoteser og metoder til exoplanetdetektionEt optisk billeddannelsessystem (modelleret som en tynd linse) bruges til at skelne mellem to hypoteser. Hypotese H0:kun stjernen er til stede. Hypotese H1:der er et stjerne-planet system til stede, h -
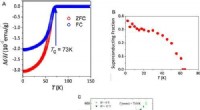 Ny cuprate superleder kan udfordre klassisk visdomFig.1. Den superledende overgang af prøven, der viser Tc ved 73K (A) Meissner -effekterne; (B) Superledende volumenfraktion i form af supervæsketæthed anslået ud fra μSR; (C) Specifik varmemåling. Kre
Ny cuprate superleder kan udfordre klassisk visdomFig.1. Den superledende overgang af prøven, der viser Tc ved 73K (A) Meissner -effekterne; (B) Superledende volumenfraktion i form af supervæsketæthed anslået ud fra μSR; (C) Specifik varmemåling. Kre
- Hvordan mennesker lærer AI at blive bedre til at gætte
- Mange europæere er relativt utilfredse med deres beskæftigelsesstatus
- Sådan beregnes radius af et kvadrat
- Saturns ringe skinner i Hubbles seneste portræt
- Besøg vandområder til en værdi af 800 milliarder dollars til økonomier, undersøgelse finder
- Dødbringende californisk brand affødte ødelæggende ildtornado