


Vil stærk og hurtigt skiftende kunstig muskel være mulig?
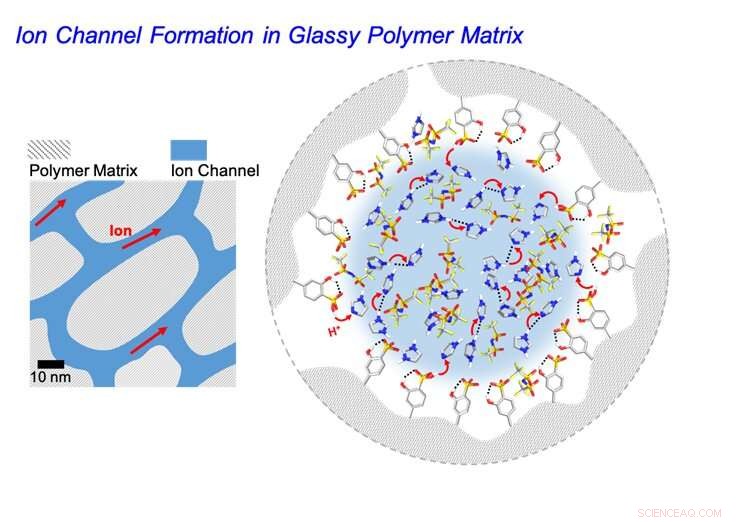
Skematisk diagram af ionkanaldannelse inde i polymerelektrolytten. Kredit:POSTECH
I den amerikanske actionfilm "Pacific Rim" kæmper gigantiske robotter kaldet "Jaegers" mod ukendte monstre for at redde menneskeheden. Disse robotter er udstyret med kunstige muskler, der efterligner ægte levende kroppe og besejrer monstre med kraft og hurtighed. Der bliver forsket i at udstyre rigtige robotter med kunstige muskler som dem, der vises i filmen. Imidlertid kan den kraftige styrke og høje hastighed i kunstige muskler ikke aktualiseres, da den mekaniske styrke (kraft) og ledningsevne (hastighed) af polymerelektrolyt - nøglematerialerne, der driver aktuatoren - har modstridende egenskaber.
Et POSTECH-forskerhold ledet af professor Moon Jeong Park, professor Chang Yun Son og forskningsprofessor Rui-Yang Wang fra Institut for Kemi har udviklet et nyt koncept for polymerelektrolyt med forskellige funktionelle grupper placeret i en afstand af 2Å. Denne polymerelektrolyt er i stand til både ion- og hydrogenbindingsinteraktioner og åbner derved muligheden for at løse disse modsætninger. Resultaterne fra denne undersøgelse er for nylig blevet offentliggjort i Advanced Materials .
Kunstige muskler bruges til at få robotter til at bevæge deres lemmer naturligt, som mennesker kan. For at drive disse kunstige muskler kræves en aktuator, der udviser mekanisk transformation under lavspændingsforhold. På grund af beskaffenheden af den polymerelektrolyt, der anvendes i aktuatoren, kunne styrke og hastighed imidlertid ikke opnås samtidigt, fordi øget muskelstyrke sænker omskiftningshastigheden og øget hastighed reducerer styrken.
For at overvinde de hidtil præsenterede begrænsninger introducerede forskningen det innovative koncept med bifunktionel polymer. Ved at danne en endimensionel ionkanal, der er flere nanometer bred inde i polymermatrixen, der er hård som glas, blev der opnået en superionisk polymerelektrolyt med både høj ionisk ledningsevne og mekanisk styrke.
-
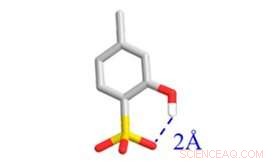
Den kemiske struktur af en bifunktionel polymerenhed. Kredit:POSTECH
-
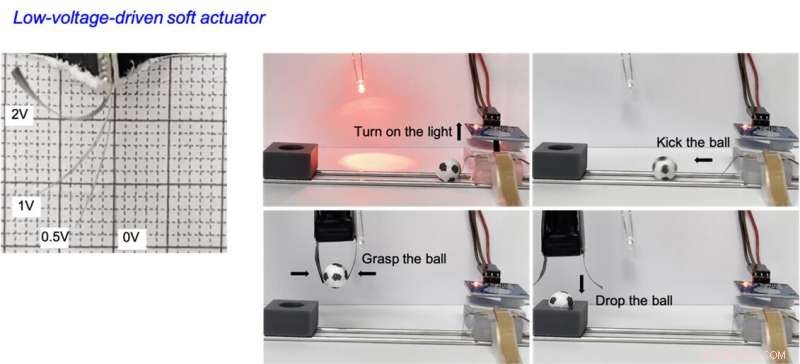
Forskellige aktiveringsbevægelser af lavspændingsaktuator. Kredit:POSTECH
Resultaterne fra denne undersøgelse har potentiale til at skabe innovationer inden for blød robotteknologi og bærbar teknologi, da de kan anvendes til udvikling af en hidtil uset kunstig muskel, der forbinder et bærbart batteri (1,5 V), producerer hurtig skift på flere millisekunder (tusindedele af et sekund) ), og stor styrke. Desuden forventes disse resultater at blive anvendt i næste generation af elektrokemiske enheder i fast tilstand og meget stabile lithiummetalbatterier. + Udforsk yderligere
Ny vej til næste generation af polymerbaseret batteridesign
Sidste artikelKonkret syntese af pleurotin udviklet
Næste artikelVideo:Hvordan kinin forårsagede Første Verdenskrig
 Varme artikler
Varme artikler
-
 Mod 4D-print med strukturelle farverFarven på den blå tarantel (Poecilotheria metallica) kommer fra præcist arrangerede nanokrystaller. Det krystallinske array fungerer som et spejl, der kun reflekterer en bestemt bølgelængde af indkomm
Mod 4D-print med strukturelle farverFarven på den blå tarantel (Poecilotheria metallica) kommer fra præcist arrangerede nanokrystaller. Det krystallinske array fungerer som et spejl, der kun reflekterer en bestemt bølgelængde af indkomm -
 Bare at klikke et molekyle til et biomolekyle for en anden funktionEt desthiobiotin molekyle, inklusive antistof og et antigen, gør plads til biotin. Kredit:University of Twente Forskere har rapporteret et materiale, der styrer cellers adfærd på en dynamisk måde,
Bare at klikke et molekyle til et biomolekyle for en anden funktionEt desthiobiotin molekyle, inklusive antistof og et antigen, gør plads til biotin. Kredit:University of Twente Forskere har rapporteret et materiale, der styrer cellers adfærd på en dynamisk måde, -
 Mikrober, der arbejder sammen, formerer biomasseomdannelsesmulighederSvampebiofilm vokser på en oxygenpermeabel, spiralformet rørformet membran i en ellers anaerob bioreaktor. Biofilmen fjernes fra reaktoren ved afslutningen af en fermenteringskørsel. Kredit:M. Stude
Mikrober, der arbejder sammen, formerer biomasseomdannelsesmulighederSvampebiofilm vokser på en oxygenpermeabel, spiralformet rørformet membran i en ellers anaerob bioreaktor. Biofilmen fjernes fra reaktoren ved afslutningen af en fermenteringskørsel. Kredit:M. Stude -
 Tilpasset polymer giver plantebaseret beskyttelse mod solens skadelige strålerEn ligninlignende kortkædet oligomer (højre) absorberer UV-lys langt mere effektivt end dens komponentmonomerer (venstre). Kredit:Wiley-VCH Verlag GmbH &Co. KGaA, Weinheim Lignin, den naturlige po
Tilpasset polymer giver plantebaseret beskyttelse mod solens skadelige strålerEn ligninlignende kortkædet oligomer (højre) absorberer UV-lys langt mere effektivt end dens komponentmonomerer (venstre). Kredit:Wiley-VCH Verlag GmbH &Co. KGaA, Weinheim Lignin, den naturlige po
- Astronomer udgiver kort, der viser 25, 000 supermassive sorte huller
- Neandertalere døde for 40.000 år siden, men der har aldrig været mere af deres DNA på Jorden
- Kan forureningens virkninger vendes?
- Sådan beregnes kritisk hastighed
- Super stålprojekt får et stort gennembrud
- Tysk konkurrencevagthund kræver mere kontrol til Facebook-brugere