


Spørgsmål og svar:Forskere satte sig for at rense havbunden for plastik

Teknologierne, der forskes i SeaClear-projektet, bliver testet i havnen i Hamborg, blandt andre. Kredit:HPA
86 millioner tons plastik ender i havene hvert år, med ødelæggende konsekvenser for livet i havet, natur og, ultimativt, for os mennesker. De store flydende plastikpletter, der dækker vandoverfladen, nogle så store som hele lande, er kun toppen af isbjerget. Omkring 90 procent af dette affald ender på havbunden. Fraunhofer Center for Maritime Logistics and Services CML og et internationalt netværk af partnere ønsker at være de første til at rydde op i dette rod med et projekt kaldet SeaClear. Et interview med projektlederne Johannes Oeffner og Cosmin Delea følger.
Du sigter mod at samle affald på havbunden i SeaClear-projektet. Hvorfor?
Oeffner:Havforurening er et af de vigtigste globale problemer. Det påvirker miljøet, økonomien, sikkerhed, sundhed og kultur. Plast nedbrydes ikke let, så de forbliver sandsynligvis i havet i hundreder af år. I betragtning af, at prognoserne forventer, at plastproduktionen vil firdobles i 2050, vi vil have et kæmpe problem, hvis vi undlader at handle. Ifølge World Economic Forum WEF, forholdet mellem plastik og fisk i 2014 var én til fem – i 2050 kunne der være lige så meget plastikaffald, som der er fisk.
Mange tilgange til at skumme plastaffald fra overfladen af havene er blevet fremsat. Hvad er dit koncept?
Oeffner:Vi koncentrerer os om at rense havbunden først, især i kystområder, hvor forureningen er særlig stor. I SeaClear-konceptet, vi gør brug af forskellige robotkøretøjer, der er forbundet med hinanden. Et autonomt eller fjernstyret moderskib (ubemandet overfladefartøj, USV) understøttes af to undervandsrobotter (fjernbetjente køretøjer, ROV) og et luftfartøj eller drone (ubemandet luftfartøj, UAV). Vi indsætter dronen og en robot til at kortlægge affaldet på overfladen og i vandsøjlen. Den anden ROV gør brug af denne information og bruger en specialdesignet griber og en sugeanordning til at indsamle det kortlagte affald på havbunden og kassere det til den kollektive beholder.

Takket være SeaClear-projektet, Dubrovniks kyst skal i fremtiden befris for undervandsaffald. Kredit:DUNEA
Hvilke teknologier ligger bag alt dette?
Delea:Vi bruger multi-agent kontrolmetoder til heterogene robotter til synkront at styre alle autonome køretøjer. Det betyder, at den ene robots positionsændring bliver anerkendt af de andre robotter. Hver robot har den indbyggede evne til at tilpasse sig disse ændringer uden menneskelig indgriben. Selvom vi udsender en kommando, det er specifikt henvendt til én robot, mens de andre robotter vil bemærke ændringen i positur og reagere, hvis det er nødvendigt. Vi bruger deep-learning algoritmer til at opdage og skelne affald fra marin fauna og flora. Specifikt, vi kombinerer forskellige sensoriske systemer såsom konventionelle og multispektrale kameraer eller akustiske sensorer for at få relevante data om vandet og, efter flere træningspas, at online opdage og klassificere havaffald.
Hvordan træner du de autonome robotter?
Delea:Detektion og klassificering kræver intensiv træning. De første skridt for begge er at bruge information fra offentligt tilgængelige kilder, såsom store onlinedatabaser, der giver optagelser af livet i havet. Derefter gennemfører vi efteruddannelse med dummy-mål. Inden de sidste demonstrationer finder sted, foreløbige forsøg afholdes for at vurdere deres præstationer.
Kystområder er meget forskellige. Hvor finder disse forsøg sted?
Oeffner:Vi tester i øjeblikket teknologierne i to forskellige scenarier på to steder i dybder på 20 til 30 meter. Vi ønsker at demonstrere processen, mens havnedriften er i gang med den eksisterende infrastruktur og faste procedurer i Hamborgs havn. Derfor fokuserer dette scenarie på havnens industriområde. Kystscenariet i Dubrovnik, Kroatien, henvender sig til turistsektoren og har specifikt til formål at rense vandet ved turist-hot-spots. De første forsøg fandt sted begge steder i foråret. Yderligere test er planlagt til Dubrovnik i sensommeren, efter at forsøgene blev suspenderet på grund af corona.
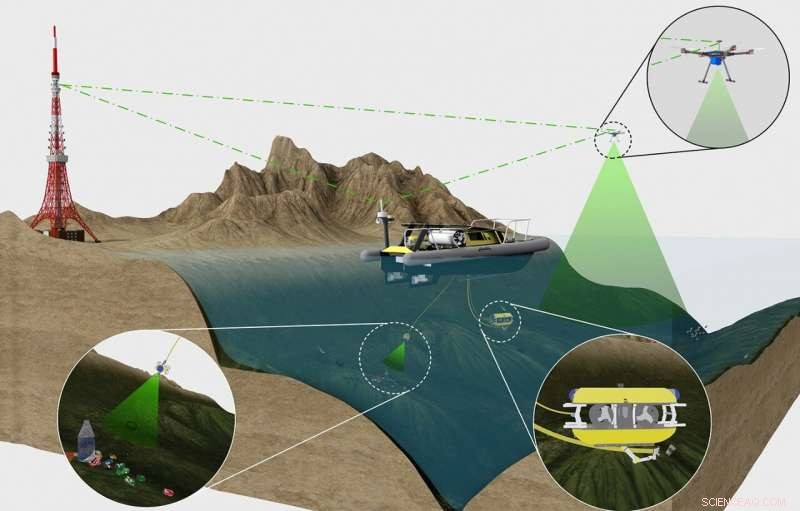
Forskellige robotkøretøjer er forbundet med hinanden i SeaClear-systemet. Et autonomt eller fjernstyret moderskib (UPS) på overfladen understøttes af to undervandsrobotter (ROV) og en flyvedrone (UAV). Kredit:TUM
Hvad er de største udfordringer i dette projekt?
Delea:Udfordringerne på de to teststeder er forskellige:Vandene i Hamborg er meget svære at analysere på grund af deres turbiditet og den lave sigtbarhed. I øvrigt, på nuværende tidspunkt er der ingen klar statistik over typen og mængden af undervandsaffald i havneområdet. Det er her, vi ønsker at videreudvikle robustheden og individuelle funktioner i SeaClear-systemet og gøre det markedsklar. Til denne ende, vi har taget interessenter fra Hamborg havn med om bord for at se på SeaClear som en fremtidig havneservice. Den store vanskelighed i Dubrovnik er, at offentlighedens adgang ikke kan begrænses. På den anden side, dette betyder, at en række yderligere sikkerhedsforanstaltninger vil være nødvendige, som skal tages, når systemet testes på stedet. Men sigtbarheden i disse farvande er tæt på ideel, så hovedformålet er at validere det overordnede system og vise dets komplette sæt funktioner.
Hvordan tackler du disse problemer?
Delea:I Hamborg, vi forsøger at sammensmelte data fra forskellige sensorer, når vi kortlægger det marine affald for at vurdere, hvilken slags undersøisk affald, der findes i disse farvande. Vi bruger primært akustiske sensorer på grund af den begrænsede synlighed. I Dubrovnik, vi skal installere yderligere sikkerhedsmekanismer på den flyvende drone, med lidt assistance fra sensorerne på moderskibet. Formålet her er at minimere sikkerhedsproblemer og forhindre kollisioner.
Og hvordan vil du sikre, at skrøbelige økosystemer som koralrev ikke bliver beskadiget?
Delea:Dette nummer er ikke til stede i Hamborg, mens det kroatiske teststed også har få koralrev. Men når det endelige SeaClear-system vil blive implementeret, det vil bruge optiske sensorer og AI til at skelne koralrevene, undgå vanskelige/farlige procedurer for at samle kun affaldet.
Hvilken del af projektet er Fraunhofer CML's ansvar, og hvem er de andre partnere i dette projekt?
Oeffner:CML er projektets tekniske koordinator og har ansvaret for at integrere det overordnede system samt designe og udvikle undervandskurven til at rumme det indsamlede affald. Hvad mere er, vi udvikler et virtuelt overvågningscenter, der sender kommandoer til robotterne og formidler deres data. Projektet omfatter også opsætning af kommunikationsnetværket og den nødvendige serverinfrastruktur til at levere SeaClear-tjenester til de forskellige klienter via webgrænseflader. Konsortiet er sammensat af de tekniske universiteter i München, Delft, Dubrovnik og Cluj-Napoca samt SubSea Tech Marseille, Hamborgs havnemyndighed og DUNEA Regional Development Agency Dubrovnik. Målet er, at de to sidstnævnte organisationer også skal operere og bruge det udviklede system, efter at projektet er afsluttet.
 Varme artikler
Varme artikler
-
 Dødstallet fra den nordvestlige hedebølge forventes at blive ved med at stigeEt Salvation Army EMS-køretøj er sat op som en kølestation, mens folk står i kø for at komme ind i en sprøjtepark, mens de prøver at slå varmen i Calgary, Alberte, Onsdag, 30. juni, 2021. Miljø Canada
Dødstallet fra den nordvestlige hedebølge forventes at blive ved med at stigeEt Salvation Army EMS-køretøj er sat op som en kølestation, mens folk står i kø for at komme ind i en sprøjtepark, mens de prøver at slå varmen i Calgary, Alberte, Onsdag, 30. juni, 2021. Miljø Canada -
 Dybe berggrundmineraler er mikrobielle kirkegårdeMikroorganismerelateret calcit fra en dyb mine ved Bergslagen, Sverige. Fra samlingerne af det svenske naturhistoriske museum. Kredit:Henrik Drake Undersøgelser i de seneste år har afsløret, at mi
Dybe berggrundmineraler er mikrobielle kirkegårdeMikroorganismerelateret calcit fra en dyb mine ved Bergslagen, Sverige. Fra samlingerne af det svenske naturhistoriske museum. Kredit:Henrik Drake Undersøgelser i de seneste år har afsløret, at mi -
 Biolog søger slim i den fjerne sydlige StillehavsøSteve Stephenson foran en fyr på Norfolk Island. Kredit:University of Arkansas Norfolk Island er en isoleret ø i det sydlige Stillehav mellem New Zealand og Australien. Øen er ret lille, med et sa
Biolog søger slim i den fjerne sydlige StillehavsøSteve Stephenson foran en fyr på Norfolk Island. Kredit:University of Arkansas Norfolk Island er en isoleret ø i det sydlige Stillehav mellem New Zealand og Australien. Øen er ret lille, med et sa -
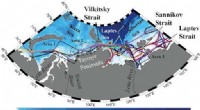 Forskere kortlægger ferskvandstransport i det arktiske havKort over studieregionen. De farvede linjer angiver skibssporene for de oceanografiske undersøgelser, hvis data blev brugt til analyse af ferskvandstransport i det arktiske hav. Kredit:Alexander Osadc
Forskere kortlægger ferskvandstransport i det arktiske havKort over studieregionen. De farvede linjer angiver skibssporene for de oceanografiske undersøgelser, hvis data blev brugt til analyse af ferskvandstransport i det arktiske hav. Kredit:Alexander Osadc
- Gen Z datingkultur defineret af seksuel fleksibilitet og komplekse kampe for intimitet
- Hvorfor Olie vil ikke blande i vand?
- Nanowire-resonatorer kan bruges til at miniaturisere energieffektiv elektronik
- Mindre jordskælv rammer Taiwan, skader 4
- Venners pelsliv hjælper med at opbygge færdigheder for livet
- Udbredt fald i vindenergiressourcer fundet på den nordlige halvkugle