


Metaloxid-halvleder nanomembran-baseret multifunktionel elektronik til bærbare-menneskelige grænseflader
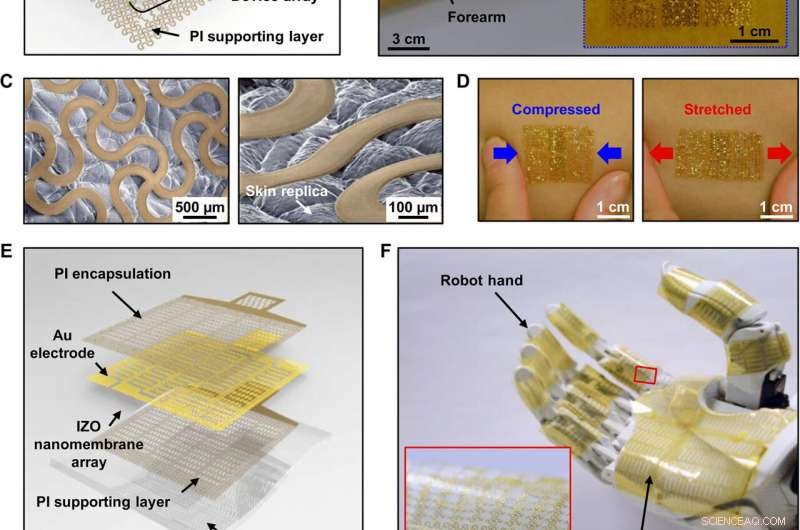
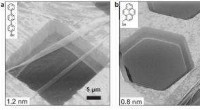
Ultra tynd, strækbart, mekanisk umærkelig, multifunktionel HMI -enhed til mennesker og robotik. (A) Skematisk eksploderet billede af en ultratynd multifunktionel HMI-enhed. (B) Optisk billede af enheden på en menneskelig underarm. Indsat er et forstørret billede. (C) SEM-billede af enheden på et stykke replikeret hud. (D) Optiske billeder af enheden på en menneskelig hud under mekanisk deformation:komprimeret (venstre) og strakt (højre). (E) Skematisk eksploderet billede af temperatursensorarrayet til robothånden. (F) Optisk billede af temperatursensormatrisen på en robothånd. Indsat er et forstørret billede. (G) SEM-billeder af temperatursensorarrayet. (H) Optiske billeder af temperatursensorarrayet på robothånden under mekanisk deformation:bøjet (venstre) og strakt (højre). Fotokredit:Kyoseung Sim, University of Houston. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Bærbare elektroniske menneske-maskine-grænseflader (HMI'er) er en ny klasse af enheder til at lette menneske- og maskininteraktioner. Fremskridt inden for elektronik, materialer og mekaniske design har tilbudt veje til kommercielle bærbare HMI-enheder. Imidlertid, eksisterende enheder er ubehagelige, da de begrænser den menneskelige krops bevægelse med langsomme responstider og udfordringer med at realisere flere funktioner. I en nylig rapport vedr Videnskabens fremskridt, Kyoseung Sim og et tværfagligt forskerhold inden for materialevidenskab og teknik, Maskiningeniør, biomedicinsk videnskab, el- og computerteknik i USA og Kina, detaljerede udviklingen af en ny polymer.
I arbejdet, de konstruerede en sol-gel-på-polymer-behandlet indium-zinkoxid-halvleder nanomembran-baseret ultratynd strækbar elektronikenhed. Fordelene omfattede multifunktionalitet, enkle fremstillingsprocesser, umærkeligt slid og robust interface. De multifunktionelle bærbare HMI-enheder spændte fra resistiv tilfældig adgangshukommelse (ReRAM) til datalagring til at danne felteffekttransistorer (FET'er), der kommunikerer med switching-kredsløb. Yderligere funktioner inkluderede sensorer til sundhed og kropsbevægelsesføling, og mikrovarmere til at levere temperatur. Efter at have testet de enkelte komponenter for deres unikke egenskaber, Sim et al. konstruerede HMI-enhederne som sømløse wearables til mennesker og også som protesehud til robotter for at tilbyde intelligent feedback og danne et lukket sløjfe HMI-system (human-machine interface).
Wearable human-machine interfaces (HMI'er) fungerer som direkte kommunikationsveje mellem mennesker og maskiner. Grænsefladerne kan registrere fysiske eller elektrofysiologiske parametre fra bærerne og gøre det lettere for maskinerne at udføre tilsvarende funktioner. Den seneste udvikling inden for elektronik, materialer og mekaniske designs har avancerede HMI -enheder. Sådanne wearables er, imidlertid, stadig halvblød og ubehagelig til problemfri integration på grund af manglende evne til at deformere og tilpasse sig en række dynamiske menneskelige bevægelser. Bløde elektroniske materialer, der perfekt matcher kravene af interesse, tilbyder et alternativ til at konstruere det strækbare, bærbare HMI-enheder. Imidlertid, de bløde gummiagtige materialer har haft langsomme responstider for at undergå væsentlig hysterese ved cyklisk deformation. Forholdsvis, uorganiske materialer kan udvise hurtige reaktionstider og gennemgå betydelig hysterese til brug som bærbar elektronik og sensorer.
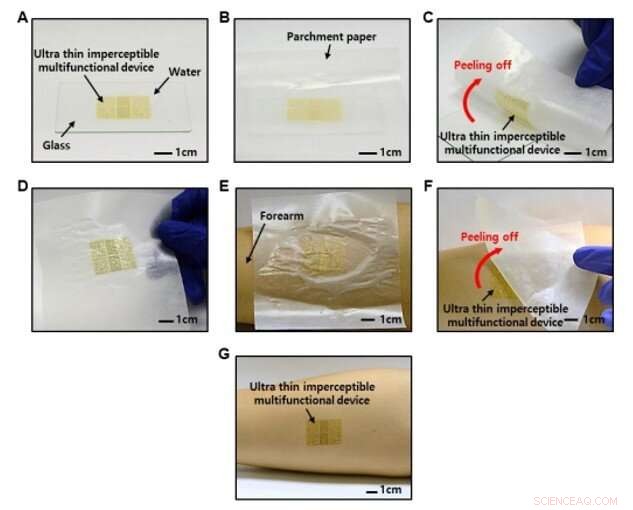
Overførsel af den ultratynde umærkelige HMI-enhed til den menneskelige underarm. (A) En fremstillet enhed på glas med påført vand. (B) Pergamentpapirlaminering oven på elektronik. (C) Hentning af HMI -enheden ved at skrælle bagepapir af. (D) Et billede af HMI-enheden på pergamentpapir. (E) Lamineringspergamentpapir med HMI-enheden på underarmen. (F) Pilning af pergamentpapiret. (G) Et billede af den overførte HMI-enhed på underarmen. (Fotokredit:Kyoseung Sim, University of Houston). Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Unikke materialeegenskaber kan lette rynker, serpentin- og kirigami-former til at fungere som nøgleaktivere for HMI-enheder med blød og strækbar karakter. For at opnå flere funktioner, herunder sansning, skifte, stimulering og datalagring, imidlertid, forskere skal stadig udvikle forskellige typer elektroniske funktionelle materialer, sideløbende med heterogene integrationsteknologier, såsom transferprint. Sådanne enheder er forbundet med komplekse fremstillingsprocedurer, inkompatibilitet af teknik, lav skalerbarhed og høje omkostninger. Derudover at teame menneske- og maskingrænseflader, materialeforskere kræver bredere forståelse af parametrene for interaktion, evaluering og kommunikation. Bærbare HMI-enheder er derfor påkrævet på både mennesker og maskiner for effektivt at danne lukkede kredsløb. Som resultat, forskning inden for robotmaterialer er rettet mod at udvikle bærbare HMI-enheder for at lukke de eksisterende huller i teknologi.
I nærværende arbejde, Sim et al. udviklet en ultratynd, mekanisk umærkelig og strækbar HMI-enhed, der skal bæres på menneskelig hud og på en robot, at fange fysiske data og tilbyde intelligent feedback hhv. at skabe et HMI-system med lukket kredsløb. De udviklede materialerne uden at kombinere flere funktionelle materialer, enheder eller overdreven heterogene integrationstrin. Enhedens design på den ultratynde, bugtende, åben mesh-konfiguration med mekanisk strækbarhed gjorde det muligt for brugeren at være fuldstændig uvidende om enheden, mens det ekstraherede nyttige signaler fra brugeren. Den bærbare enhed indsamlede signaler fra den menneskelige muskel for at lede robotten direkte for at give brugeren mulighed for at mærke de fornemmelser, som robothånden oplever. Forskerholdet studerede i fællesskab materialer og enhedsdesign, fremstilling og karakterisering for at demonstrere grundlæggende aspekter af metaloxid-nanomembranen til multifunktionelle applikationer i HMI-enheder.
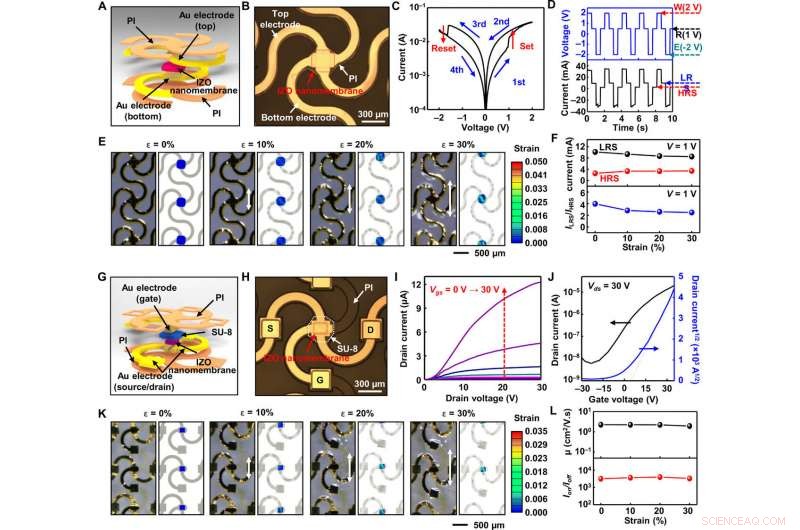
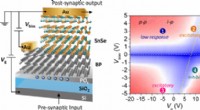
Karakteristika for ReRAM og FET'er. (A) Skematisk eksploderet billede af den IZO nanomembran-baserede ReRAM. (B) Optisk mikroskopisk billede af ReRAM. (C) IV egenskaber ved den bipolære omskiftning af ReRAM. (D) WRER-cyklus for ReRAM. (E) Sekventielle billeder af den IZO nanomembranbaserede ReRAM under belastning og tilsvarende FEA-resultater af IZO. (F) Strøm ved LRS og HRS og ILRS/IHRS under belastning. (G) Skematisk eksploderet visning af IZO FET. (H) Optisk mikroskopisk billede af FET. (I) FET'ens outputkarakteristika. (J) FET's overførselsegenskaber. (K) Sekventielle billeder af FET'erne under belastning og tilsvarende FEA-resultater af IZO. (L) Beregnet felt-effekt mobilitet af IZO og ION/IOFF for FET under belastning. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Sim et al. komponerede HMI-enheden med en indiumzinkoxid (IZO) nanomembranbaseret ReRAM (random-access memory)-array, FET (felteffektiv transistor) array, distribuerede temperaturfølere, UV sensorer, belastningssensorer og guld (Au) -baserede termiske simulatorer. De konstruerede alle enheder på et tyndt (~2 µm) polyimid (PI) lag ved spin-coating oven på et stift glasholdende substrat for at gøre det nemt at frigive enheden til at være fritstående. Efter mange indviklede tekniske trin, de afsluttede fremstillingen af enheden ved at nedsænke den i bufferoxidætsemiddel (BOE) for at frigøre enheden fra glasplatformen. Brug bagepapir, forskerne overførte derefter enheden til en menneskelig arm uden yderligere klæbemiddel. De brugte scanningselektronmikroskopi til at vise, at hudpolymeren ikke undergik delaminering ved kontakt med huden. At danne et HMI-system med lukket kredsløb mellem menneske og maskine, forskerne udviklede på samme måde en hudprotese bestående af poly(dimethylsiloxan) (PDMS) og en række sensorer til at efterligne den menneskelige huds sensoriske funktioner og implementerede den på en robothånd.
Sim et al. udført detaljeret karakterisering af den sol-gel-på-polymer-behandlede IZO nanomembranoxid-halvleder, hvilket var nøglen til at realisere flere funktionaliteter uden heterogen integration. Da datalagringsenheder såsom hukommelse var integrerede komponenter i bærbare HMI'er; forskerne konstruerede den IZO-nanomembran-baserede strækbare ReRAM med en Au/IZO/Au sandwich-struktur med PI (polyimid) indkapsling. Under tilstrækkelig spænding, de skabte iltioner og ilttomrum for at danne en ledende filament på tværs af de to elektroder til drastisk strømovergang fra høj modstandstilstand (HRS) til tilstand med lav modstand (LRS). Når de påførte en omvendt forspænding ved en bestemt spænding, ilt ledigheden blev neutraliseret, får det ledende filament til at briste og for strømmen at falde drastisk. Sim et al. udført skrive-læse-slette-skrive-cyklusser (WRER) og retentionstests for at vurdere pålideligheden af den IZO nanomembran-baserede ReRAM, hvor resultaterne viste stabil drift uden nedbrydning.
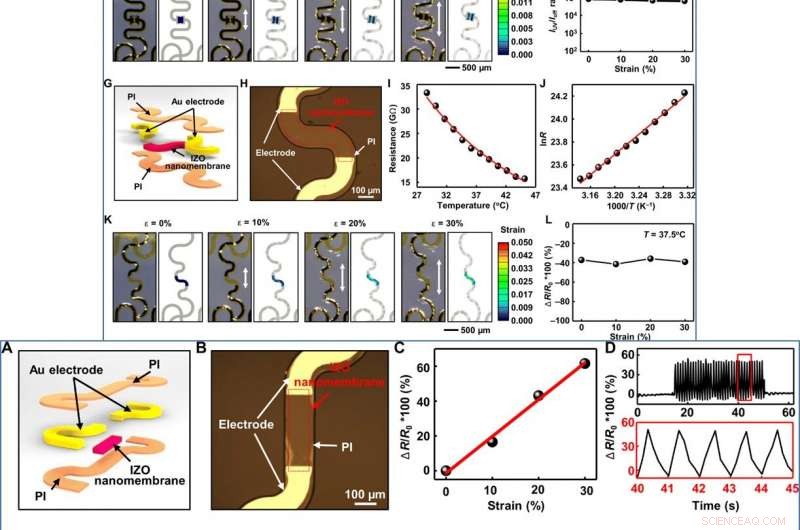
TOP:Karakteristika for UV- og temperaturfølere. (A) Skematisk eksploderet billede af den IZO nanomembranbaserede UV-sensor. (B) Optisk mikroskopisk billede af UV-sensoren. (C) I-V karakteristika for UV-sensoren. (D) Kalibreringskurve for IZO UV-sensoren. (E) Sekventielle billeder af UV-sensoren under belastning og tilsvarende FEA-resultater af IZO. (F) IUV/Idark til UV -lys under belastning. (G) Skematisk eksploderet afbildning af IZO -temperatursensoren. (H) Optisk mikroskopisk billede af temperatursensoren. (I) Kalibreringskurve for temperaturføleren. (J) Plot af lnR versus 1000/T af temperatursensoren. (K) Sekventielle billeder af IZO-temperatursensoren under belastning og tilsvarende FEA-resultater af IZO. (L) Relativ modstandsændring af temperaturføleren under belastning. BUNDT:Karakteristika for strain sensor. (A) Skematisk eksploderet visning af IZO stamme sensor. (B) Optisk mikroskopisk billede af belastningssensoren. (C) Kalibreringskurve for belastningssensoren. (D) Relativ modstandsændring af belastningssensoren under cyklisk strækning og afspænding. (E) Sekventielle billeder af belastningssensoren under belastning og tilsvarende FEA -resultater af IZO. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
De bekræftede den mekaniske belastningseffekt på enhedens ydeevne ved at teste ReRAM under forskellige niveauer af mekanisk strækning ved hjælp af en specialfremstillet båre. Resultaterne viste, at halvlederen oplevede minimal og ubetydelig belastning, når den blev strakt, afspejler enhedens rationelle design. Resultaterne indikerede ReRAM-enhedens evne til at fungere stabilt under mekanisk belastning uden væsentlig nedbrydning. FET'en, der blev brugt i enheden, dannede på samme måde en grundlæggende byggeklods til at interface og skifte elektronik til HMI'er.
Forskerne testede derefter den ultratynde UV-sensor af den hudbærbare polymer og dens evne til at overvåge UV-eksponering for applikationer for at reducere risikoen for hudsygdomme. Tilsvarende de testede virkningerne af hudtemperatur, en vigtig sundhedsindikator ved at måle modstanden af den ultratynde strækbare termistor ved forskellige temperaturer. De beregnede temperaturkoefficienten til at være sammenlignelig med kommercielt tilgængelige voluminøse termistorer. Forskerholdet udviklede også en IZO nanomembran-baseret belastningssensor til kommunikation mellem et menneske og en robot for at fremhæve IZO-materialets alsidighed. Sim et al. sammenlignede de eksperimentelle resultater med finite element analyse (FEA) for at beregne stamprofilen for IZO -sanseområdet under forskellige niveauer af mekanisk strækning. Simuleringerne stemte godt overens med de eksperimentelle resultater.
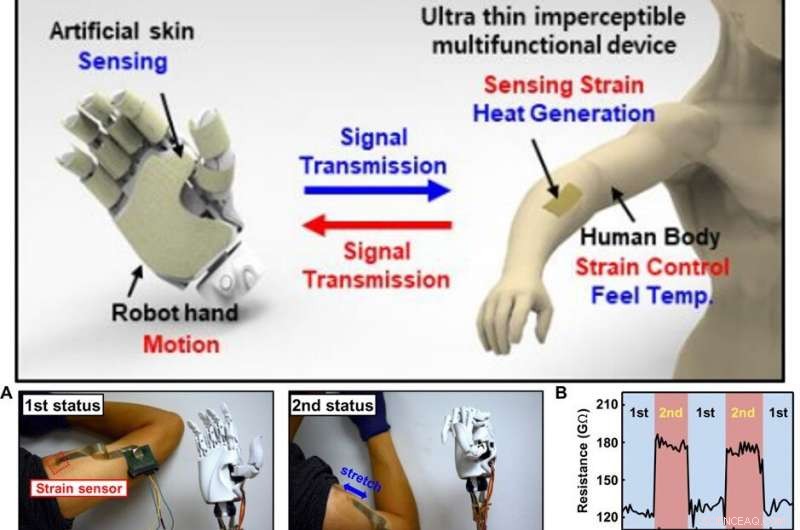
TOP:Skematisk illustration af en lukket sløjfe HMI. NEDERST:Bærbar lukket sløjfe HMI. (A) Repræsentativt billede af menneskelig bevægelse for at styre robothånden. (B) Modstandsændring af belastningssensor på den menneskelige hud under forskellige menneskelige bevægelser. (C) repræsentativt billede af menneskelig bevægelse efterligner. (D) Modstandsændring af belastningssensor på efterligning af menneskelig bevægelse. (E) Repræsentativt billede af robothånden, med temperatursensoren, der rører den menneskelige hånd. (F) Modstandsændring af temperatursensoren på robothånden, mens den menneskelige hånd holder robotten. (G) Skematisk eksploderet billede af den resistive mikrovarmer. (H) IR-temperaturkortlægning af mikrovarmeren. (I) Dynamisk temperaturændring under forskellige påførte spændinger. (J) Kalibreringskurve for mikrovarmeren. Billedkredit:Kyoseung Sim, University of Houston. Kredit:Science Advances, doi:10.1126/sciadv.aav9653
Efter at have testet multifunktionsenhedens individuelle funktioner, Sim et al. demonstreret multifunktionaliteten af de interaktive HMI'er med lukket kredsløb. Når bærbare sensorer på den menneskelige hud registrerede signaler såsom belastningsinduceret menneskelig bevægelse, de detekterede signaler kunne styre robothåndens bevægelse. For eksempel, når forskerholdet placerede IZO-belastningssensoren på den menneskelige skulder, registrerede det belastning ved bevægelse af den menneskelige arm, eller når brugeren greb om en genstand. Parallelt, protesehuden baseret på IZO-temperatursensoren på robothånden detekterede temperaturen i det ydre miljø eller på den grebne genstand for at bestemme den passende spænding, der skal påføres en blød termisk stimulator på den menneskelige hud for at overføre fornemmelsen. På grundlag af en række af sådanne koordinerede interaktioner, forskerne skabte et interaktivt HMI-system med lukket sløjfe.
På denne måde Kyoseung Sim og kolleger konstruerede en sol-gel-on-polymer forarbejdet IZO metaloxid nanomembran og udviste sin alsidighed i forhold til ultratynde bløde hukommelsesenheder, transistorer, temperaturfølere, belastningssensorer og UV-sensorer. De dannede den multifunktionelle enhed samtidigt i et enkelt trin uden nogen heterogen integration. De kombinerede ultratynde strækbare elektronikaktiverede bærbare sensorer, hudproteser og aktuatorenhed til menneske-robot-grænseflader beviste gennemførligheden af det lukkede HMI-system. Et sådant setup vil bane vejen for omkostningseffektive, skalerbar fremstilling og bærbare HMI -enheder i stand til problemfri integration med brugeren. Forskerne forestiller sig, at det bærbare HMI vil blive en vital teknologi med forbedrede muligheder, komfort og bekvemmelighed for effektivt samarbejde mellem maskiner og mennesker.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 En titanat nanotrådsmaske, der kan fjerne patogenerKredit:Swaoxid SA Filter papir lavet af titaniumoxid nanotråde er i stand til at fange patogener og ødelægge dem med lys. Denne opdagelse fra et EPFL-laboratorium kunne tages i brug i personlige v
En titanat nanotrådsmaske, der kan fjerne patogenerKredit:Swaoxid SA Filter papir lavet af titaniumoxid nanotråde er i stand til at fange patogener og ødelægge dem med lys. Denne opdagelse fra et EPFL-laboratorium kunne tages i brug i personlige v -
 Kulmineaffaldsmateriale er mere end 90 procent effektivt til at fjerne tungmetalYihan Zhaos ph.d.-forskning viser, at nano humus, et biprodukt af kulminedrift, kunne tilbyde en hurtig og effektiv måde at hjælpe med at genvinde jord og vand brugt i minedrift. Kredit:University of
Kulmineaffaldsmateriale er mere end 90 procent effektivt til at fjerne tungmetalYihan Zhaos ph.d.-forskning viser, at nano humus, et biprodukt af kulminedrift, kunne tilbyde en hurtig og effektiv måde at hjælpe med at genvinde jord og vand brugt i minedrift. Kredit:University of -
 Proces udviklet til ultratynde kulstofmembranerVed hjælp af en ny proces har teamet, der arbejder med professor Dr. Armin Gölzhäuser, produceret tolv forskellige nanomembraner. De tre billeder er lavet ved hjælp af Bielefeld Helium Ion Microscope
Proces udviklet til ultratynde kulstofmembranerVed hjælp af en ny proces har teamet, der arbejder med professor Dr. Armin Gölzhäuser, produceret tolv forskellige nanomembraner. De tre billeder er lavet ved hjælp af Bielefeld Helium Ion Microscope -
 Hacking af den menneskelige hjerne - laboratoriefremstillede synapser til kunstig intelligensKredit:American Chemical Society En af de største udfordringer for udvikling af kunstig intelligens er at forstå den menneskelige hjerne og finde ud af, hvordan man efterligner den. Nu, en gruppe
Hacking af den menneskelige hjerne - laboratoriefremstillede synapser til kunstig intelligensKredit:American Chemical Society En af de største udfordringer for udvikling af kunstig intelligens er at forstå den menneskelige hjerne og finde ud af, hvordan man efterligner den. Nu, en gruppe
- Undersøgelse af nobelium med laserlys
- Hvorfor det kan være en god ting at glemme på arbejdet
- Menneskelige aktiviteter har allerede sat gang i global jorderosion 4, 000 år siden
- Metamaterialefliser øger følsomheden for store teleskoper
- Ser man på en fremtid, hvor afisning af fly hører fortiden til
- Hvordan bruges radioaktive dating til datofossiler?