


Adaptiv mikroelektronik omformer uafhængigt og registrerer miljøet for første gang
Takket være sensorer og kunstige muskler på mikroskalaen, fremtidens mikroelektronik vil være i stand til at antage komplekse former og skabe bioneurale grænseflader med følsomt biologisk væv uden at forårsage skade. Kredit:IFW Dresden/Chemnitz University of Technology
Fleksibel og adaptiv mikroelektronik betragtes som en innovationsdriver for nye og mere effektive biomedicinske applikationer. Disse omfatter, for eksempel, behandling af beskadigede nervebundter, kronisk smerte, eller kontrol af kunstige lemmer. For at dette skal virke, tæt kontakt mellem elektronik og neuralt væv er afgørende for effektiv elektrisk og mekanisk kobling. Ud over, potentielle anvendelser opstår fra produktionen af små og fleksible kirurgiske værktøjer.
Et internationalt team ledet af Prof. Dr. Oliver G. Schmidt, leder af Institute for Integrative Nanosciences ved Leibniz Institute for Solid State and Materials Research (IFW) Dresden og indehaver af professoratet i materialer til nanoelektronik ved Chemnitz University of Technology og initiativtager til Center for Materialer, Arkitekturer og integration af nanomembraner (MAIN), samt Boris Rivkin, en ph.d. studerende i Prof. Schmidts gruppe, har nu for første gang demonstreret, at sådan adaptiv mikroelektronik er i stand til at positionere sig selv på en kontrolleret måde, manipulere biologisk væv, og reagere på deres omgivelser ved at analysere sensorsignaler. Resultaterne, med Rivkin som første forfatter, er optrådt i journalen Avancerede intelligente systemer . Forskellige egenskaber for dynamiske processer kombineret for første gang i adaptiv mikroelektronik
Indtil nu, det har ikke været muligt for mikroelektroniske strukturer at både sanse og tilpasse sig deres omgivelser. Selvom der er strukturer med en belastningssensor, der overvåger deres egen form, mikroelektronik med magnetiske sensorer, der orienterer sig i rummet, eller enheder, hvis bevægelse kan styres af elektroaktive polymerstrukturer, en kombination af disse egenskaber til anvendelse i en dynamisk skiftende organisme på mikrometerskalaen, altså et godt stykke under en millimeter, er ikke blevet rapporteret indtil videre.Adaptiv og intelligent mikroelektronik
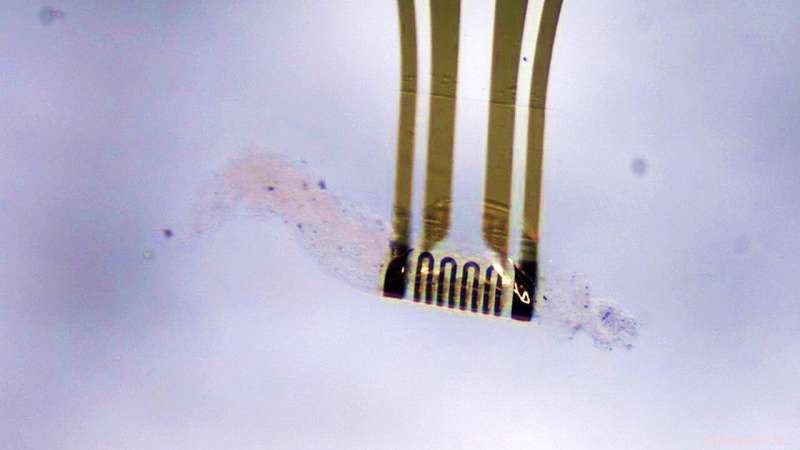
Kernen i disse applikationer er en polymerfilm, kun 0,5 mm bred og 0,35 mm lang, som fungerer som en bærer for de mikroelektroniske komponenter. Til sammenligning, et 1-cent-stykke har en diameter på omkring 16 mm. I deres udgivelse, holdet fra Chemnitz University of Technology og Leibniz IFW i Dresden præsenterer nu adaptiv og intelligent mikroelektronik, der bruger mikroskopiske kunstige muskler til at omforme og tilpasse sig dynamiske miljøer takket være feedback fra passende sensorer.
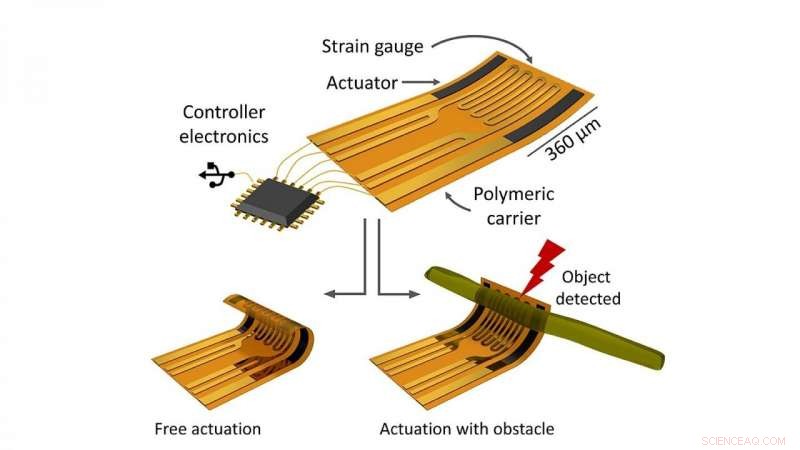
Sensorsignalerne føres gennem elektriske forbindelser til en mikrocontroller, hvor de evalueres og bruges til at generere kontrolsignaler til de kunstige muskler. Dette gør det muligt for disse miniatureværktøjer at tilpasse sig komplekse og uforudsigelige anatomiske former. For eksempel, nervebundter har altid forskellige størrelser. Adaptiv mikroelektronik kan forsigtigt omslutte disse nervebundter for at etablere en passende bioneural grænseflade.
Væsentligt for dette er integrationen af form- eller positionssensorer i kombination med mikroaktuatorer. Adaptiv mikroelektronik fremstilles derfor i en såkaldt 'monolitisk wafer-skala proces.' 'Wafers' er flade substrater lavet af silicium eller glas, hvorpå kredsløbene er fremstillet. Monolitisk produktion gør det muligt at fremstille mange komponenter samtidigt parallelt på et substrat. Dette muliggør hurtig og samtidig mere omkostningseffektiv produktion. Kunstige muskler genererer bevægelse - brug i organiske omgivelser mulig
Polymerfilmen udviklet af forskerholdet fra Chemnitz og Dresden er kun 0,5 mm bred og 0,35 mm lang. Den fungerer som en bærer for de mikroelektroniske komponenter og er udstyret med kunstige muskler samt sensorer. Dette sætter den i stand til at opfatte sine omgivelser, genkende objekter, og tilpasse sig forskellige former. Kredit:IFW Dresden/Chemnitz University of Technology
Bevægelsen og omformningen af adaptiv mikroelektronik opnås ved hjælp af kunstige muskler, de såkaldte 'aktuatorer'. Disse genererer bevægelse ved at udstøde eller absorbere ioner og kan således omforme polymerfilmen.
Denne proces er baseret på anvendelsen af polymeren polypyrrol (PPy). Fordelen ved denne metode er, at manipulation af formen kan udføres målrettet og med allerede meget lav elektrisk forspænding (mindre end én volt). Det faktum, at kunstige muskler også er sikre til brug i organiske miljøer, er allerede blevet påvist af andre grupper tidligere. Dette involverede testning af mikromaskinernes ydeevne i forskellige miljøer, der er relevante for medicinske applikationer, herunder cerebrospinalvæske, blod, plasma, og urin.
Går efter endnu mere komplekse mikroelektroniske robotter i fremtiden
Holdet fra Dresden og Chemnitz forventer, at adaptiv og intelligent mikroelektronik vil blive udviklet til komplekse robotmikrosystemer på mellemlang sigt. Boris Rivkin siger:"Det afgørende næste skridt er overgangen fra den tidligere flade arkitektur til tredimensionelle mikrorobotter. Tidligere arbejde har vist, hvordan flade polymerfilm kan omformes til tredimensionelle strukturer gennem selvorganiseret foldning eller rulning. Vi vil tilføje adaptiv elektronik til sådanne materialer for at udvikle systemer såsom robotmikrokatetre, små robotarme, og formbare neurale implantater, der virker semi-autonomt efter en digital instruktion."
Dr. Daniil Karnaushenko, gruppeleder i prof. Oliver Schmidts team, tilføjer, "Sådan komplekse mikrorobotter vil kræve et stort antal individuelle aktuatorer og sensorer. At effektivt rumme og bruge elektroniske komponenter i en sådan tæthed er en udfordring, fordi der er behov for flere elektriske forbindelser, end der er plads til rådighed. Dette vil blive løst af komplekse elektroniske kredsløb, der vil integreres i adaptiv mikroelektronik i fremtiden for at videregive de relevante instruktioner til de rigtige komponenter."
Dette arbejde bidrager også til det nye område inden for robotassisteret kirurgi, som kunne muliggøre mindre invasive men mere præcise procedurer. Smarte kirurgiske værktøjer, der genererer pålidelig feedback om deres form og position, kan blive uundværlige ved behandling af sart væv.
 Varme artikler
Varme artikler
-
 En ny platform til at studere grafenes elektroniske egenskaber(Venstre) Nanoenhedsstruktur til at måle grafens elektroniske egenskaber. Grafen er klemt mellem to hBTN-lag og de to elektroder (grafit og silicium). (Højre) Konduktans af enkeltlags grafen ved forsk
En ny platform til at studere grafenes elektroniske egenskaber(Venstre) Nanoenhedsstruktur til at måle grafens elektroniske egenskaber. Grafen er klemt mellem to hBTN-lag og de to elektroder (grafit og silicium). (Højre) Konduktans af enkeltlags grafen ved forsk -
 Selvsamlede supergitter skaber molekylære maskiner med hængsler og tandhjulDenne figur viser arrangementet af nanopartikler i to tilstødende lag af supergitteret, med konfigurationer til venstre svarende til supergitterets ligevægtstilstand ved omgivelsesbetingelser, og dem
Selvsamlede supergitter skaber molekylære maskiner med hængsler og tandhjulDenne figur viser arrangementet af nanopartikler i to tilstødende lag af supergitteret, med konfigurationer til venstre svarende til supergitterets ligevægtstilstand ved omgivelsesbetingelser, og dem -
 Picosecond magnetiseringsdynamik af spin-tilstande afsløret af diffraktiv ferromagnetisk resonansFigur 1:(a) Illustration af opsætningen af diffraktiv ferromagnetisk resonans (DFMR). Prøven placeres på en koplanar bølgeleder, som er monteret inde i det bløde røntgendiffraktometer RASOR på beaml
Picosecond magnetiseringsdynamik af spin-tilstande afsløret af diffraktiv ferromagnetisk resonansFigur 1:(a) Illustration af opsætningen af diffraktiv ferromagnetisk resonans (DFMR). Prøven placeres på en koplanar bølgeleder, som er monteret inde i det bløde røntgendiffraktometer RASOR på beaml -
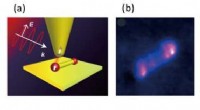 Visualisering af strukturer i atomskala med den optiske kraftFig. 1 (a) Skematisk billede af fotoinduceret kraftmikroskopi. (b)(c) Foto-inducerede kraftmikroskopibilleder af en kvanteprik målt ved hjælp af forskellige bølgelængder (600 nm, 520 nm). (d) Fotoindu
Visualisering af strukturer i atomskala med den optiske kraftFig. 1 (a) Skematisk billede af fotoinduceret kraftmikroskopi. (b)(c) Foto-inducerede kraftmikroskopibilleder af en kvanteprik målt ved hjælp af forskellige bølgelængder (600 nm, 520 nm). (d) Fotoindu
- Svømmende mikrobots kan fjerne sygdomsfremkaldende bakterier fra vand
- Et nærmere kig på, hvad der forårsagede Flint-vandkrisen
- Tweaks bag genfødslen af næsten kasserede organiske solteknologier
- Minimering af eksponering for skadelige flammehæmmende kemikalier i affaldsskum og plast
- Markedsrapport:Stigende aktieformue øger forbruget, beskæftigelse
- Lovende ny teknik bringer skarpere fokus på hjernens mikroskopiske detaljer