


Ny billedbehandlingsmetode gør små robotter synlige i kroppen
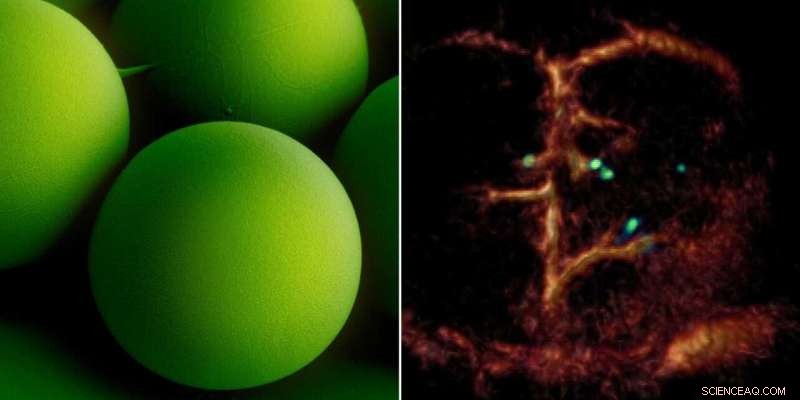
Et gennembrud:Små cirkulerende mikrorobotter, der er så små som røde blodlegemer (venstre billede), blev visualiseret én efter én i blodkarrene hos mus med optoakustisk billeddannelse (højre billede). Kredit:ETH Zürich / Max Planck Institute for Intelligent Systems
Mikrorobotter har potentialet til at revolutionere medicin. Forskere ved Max Planck ETH Center for Learning Systems har nu udviklet en billedbehandlingsteknik, der for første gang genkender cellestore mikrorobotter individuelt og i høj opløsning i en levende organisme.
Hvordan kan en blodprop fjernes fra hjernen uden større kirurgisk indgreb? Hvordan kan et lægemiddel afgives præcist til et sygt organ, som er svært at nå? Det er blot to eksempler på de utallige innovationer, som forskerne forestiller sig inden for medicinsk mikrorobotik. Små robotter lover fundamentalt at ændre fremtidige medicinske behandlinger:En dag kan de bevæge sig gennem patientens vaskulatur for at eliminere maligniteter, bekæmpe infektioner eller give præcis diagnostisk information fuldstændigt non-invasivt. I princippet, så hævder forskerne, kan kredsløbssystemet fungere som en ideel leveringsvej for mikrorobotterne, da det når alle organer og væv i kroppen.
For at sådanne mikrorobotter kan udføre de tilsigtede medicinske indgreb sikkert og pålideligt, må de ikke være større end en biologisk celle. Hos mennesker har en celle en gennemsnitlig diameter på 25 mikrometer - en mikrometer er en milliontedel af en meter. De mindste blodkar hos mennesker, kapillærerne, er endnu tyndere:deres gennemsnitlige diameter er kun 8 mikrometer. Mikrorobotterne skal være tilsvarende små, hvis de uhindret skal passere gennem de mindste blodkar. Men så lille en størrelse gør dem også usynlige for det blotte øje - og videnskaben har heller ikke endnu fundet en teknisk løsning til at opdage og spore robotterne i mikronstørrelse individuelt, mens de cirkulerer i kroppen.
Sporing af cirkulerende mikrorobotter for første gang
"Før dette fremtidsscenarie bliver til virkelighed, og mikrorobotter faktisk bruges i mennesker, er den præcise visualisering og sporing af disse bittesmå maskiner absolut nødvendig," siger Paul Wrede, der er doktorgradsstipendiat ved Max Planck ETH Center for Learnings Systems (CLS) .
"Uden billeddannelse er mikrorobotik i det væsentlige blind," tilføjer Daniel Razansky, professor i biomedicinsk billeddannelse ved ETH Zürich og Zürich Universitet og medlem af CLS. "I realtid, høj opløsning billeddannelse er således afgørende for at detektere og kontrollere cellestørrelse mikrorobotter i en levende organisme." Ydermere er billeddannelse også en forudsætning for at overvåge terapeutiske interventioner udført af robotterne og verificere, at de har udført deres opgave efter hensigten. "Den manglende evne til at give feedback i realtid på mikrorobotterne var derfor en stor hindring på vejen til klinisk anvendelse."
Sammen med Metin Sitti, en verdensførende mikrorobotikekspert, der også er CLS-medlem som direktør ved Max Planck Institute for Intelligent Systems (MPI-IS) og ETH professor i fysisk intelligens, og andre forskere, har holdet nu opnået en vigtig gennembrud i effektiv sammensmeltning af mikrorobotik og billedbehandling. I en undersøgelse, der netop er offentliggjort i det videnskabelige tidsskrift Science Advances , formåede de for første gang tydeligt at detektere og spore bittesmå robotter så små som fem mikrometer i realtid i muses hjernekar ved hjælp af en ikke-invasiv billeddannelsesteknik.
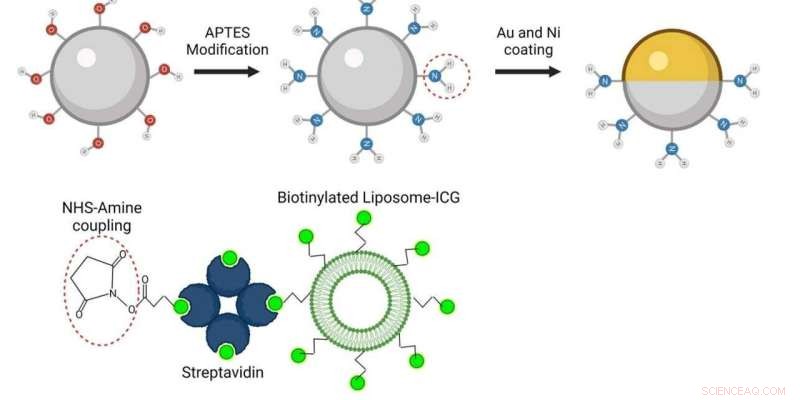
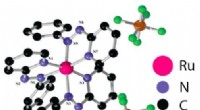
De sfæriske mikrorobotter består af silicabaserede partikler og er blevet belagt halvdelen med nikkel (Ni) og halvdelen med guld (Au) og fyldt med grønfarvede nanobobler (liposomer). På denne måde kan de detekteres individuelt med den nye optoakustiske billedbehandlingsteknik. Kredit:ETH Zürich / MPI-IS
Forskerne brugte mikrorobotter med størrelser fra 5 til 20 mikrometer. De mindste robotter er på størrelse med røde blodlegemer, som er 7 til 8 mikrometer i diameter. Denne størrelse gør det muligt for de intravenøst injicerede mikrorobotter at rejse selv gennem de tyndeste mikrokapillærer i musehjernen.
Forskerne udviklede også en dedikeret optoakustisk tomografiteknologi for rent faktisk at detektere de små robotter én efter én, i høj opløsning og i realtid. Denne unikke billeddannelsesmetode gør det muligt at opdage de bittesmå robotter i dybe og svært tilgængelige områder af kroppen og hjernen, hvilket ikke ville have været muligt med optisk mikroskopi eller nogen anden billedbehandlingsteknik. Metoden kaldes optoakustisk, fordi lys først udsendes og absorberes af det respektive væv. Absorptionen producerer derefter bittesmå ultralydsbølger, der kan detekteres og analyseres for at resultere i volumetriske billeder i høj opløsning.
Janus-ansigtede robotter med guldlag
For at gøre mikrorobotterne meget synlige på billederne havde forskerne brug for et passende kontrastmateriale. Til deres undersøgelse brugte de derfor sfæriske, silicapartikelbaserede mikrorobotter med en såkaldt Janus-type belægning. Denne type robot har et meget robust design og er meget velkvalificeret til komplekse medicinske opgaver. Den er opkaldt efter den romerske gud Janus, som havde to ansigter. I robotterne er de to halvdele af kuglen belagt forskelligt. I den aktuelle undersøgelse har forskerne belagt den ene halvdel af robotten med nikkel og den anden halvdel med guld.
"Guld er et meget godt kontrastmiddel til optoakustisk billeddannelse," forklarer Razansky, "uden det gyldne lag er signalet, der genereres af mikrorobotterne, bare for svagt til at blive opdaget." Ud over guld testede forskerne også brugen af små bobler kaldet nanoliposomer, som indeholdt et fluorescerende grønt farvestof, der også fungerede som kontrastmiddel. "Liposomer har også den fordel, at du kan fylde dem med potente lægemidler, hvilket er vigtigt for fremtidige tilgange til målrettet lægemiddellevering," siger Wrede, den første forfatter til undersøgelsen. De potentielle anvendelser af liposomer vil blive undersøgt i en opfølgende undersøgelse.
Ydermere giver guldet også mulighed for at minimere den cytotoksiske effekt af nikkelbelægningen – hvis mikrorobotter i fremtiden skal operere i levende dyr eller mennesker, skal de trods alt gøres biokompatible og ikke-toksiske, hvilket er en del af en igangværende forskning . I denne undersøgelse brugte forskerne nikkel som et magnetisk drivmedium og en simpel permanent magnet til at trække robotterne. I opfølgende undersøgelser ønsker de at teste den optoakustiske billeddannelse med mere komplekse manipulationer ved hjælp af roterende magnetfelter.
"Dette ville give os mulighed for præcist at kontrollere og flytte mikrorobotterne selv i stærkt strømmende blod," siger Metin Sitti. "I denne undersøgelse fokuserede vi på at visualisere mikrorobotterne. Projektet var enormt vellykket takket være det fremragende samarbejdsmiljø på CLS, der gjorde det muligt at kombinere ekspertisen fra de to forskergrupper på MPI-IS i Stuttgart for robotdelen og ETH Zürich for billeddannelsesdelen," slutter Sitti. + Udforsk yderligere
Små biohybride robotter til intelligent medicinafgivelse
 Varme artikler
Varme artikler
-
 Forskere opdager en ny metode til at sprede varme i elektroniske enhederFariborz Kargar, en kandidatstuderende forsker, måler den akustiske fononspredning i halvleder -nanotråde i UCRs Phonon Optimized Engineered Materials (POEM) Center, instrueret af Alexander Balandin.
Forskere opdager en ny metode til at sprede varme i elektroniske enhederFariborz Kargar, en kandidatstuderende forsker, måler den akustiske fononspredning i halvleder -nanotråde i UCRs Phonon Optimized Engineered Materials (POEM) Center, instrueret af Alexander Balandin. -
 Jern nanorobotter går undercover for at foretage overvågning af levende celler i realtidMærkede celler kunne spores enten i cellekulturer eller en gang injiceret i et levende dyr. Kredit:KAUST Levende celler inde i kroppen kunne placeres under overvågning - deres placering og migrati
Jern nanorobotter går undercover for at foretage overvågning af levende celler i realtidMærkede celler kunne spores enten i cellekulturer eller en gang injiceret i et levende dyr. Kredit:KAUST Levende celler inde i kroppen kunne placeres under overvågning - deres placering og migrati -
 Gas giver laser-induceret grafen super egenskaberLaser-induceret grafen skabt i nærvær af argongas er superhydrofob, hvilket betyder at den undgår vand. Processen udviklet på Rice University laver materialer, der kan være superhydrofile eller superh
Gas giver laser-induceret grafen super egenskaberLaser-induceret grafen skabt i nærvær af argongas er superhydrofob, hvilket betyder at den undgår vand. Processen udviklet på Rice University laver materialer, der kan være superhydrofile eller superh -
 Resistive hukommelseskomponenter computerindustrien kan ikke modståForskere ved Yale, det nationale universitet i Singapore, og den indiske sammenslutning for dyrkning af videnskab har produceret nye memsistor -enheder, der holder i 1 billion cyklusser. Kredit:Yale U
Resistive hukommelseskomponenter computerindustrien kan ikke modståForskere ved Yale, det nationale universitet i Singapore, og den indiske sammenslutning for dyrkning af videnskab har produceret nye memsistor -enheder, der holder i 1 billion cyklusser. Kredit:Yale U
- CES Gadget Show:Overvågning er i gang - og i stor stil
- Positive effekter af oversvømmelser
- Flere patruljer, færre sejlere til SpaceX splashdown lørdag
- Hvordan efterlod dinosaurer spor i fast sten?
- Ny rapport om klimaændringer i Sierra Nevada viser behovet for menneskelig tilpasning
- Holland afgraver romersk kanal, vej nær UNESCO kulturarvssteder