


Hummingbird næb viser vejen til fremtidens mikromaskinedesign
Et Cornell-forskerhold har udviklet en ny måde at designe komplekse mikroskalamaskiner på, en der henter inspiration fra driften af proteiner og kolibri-næb.
Gruppens papir, "Bifurcation Instructed Design of Multistate Machines," offentliggjort i Proceedings of the National Academy of Sciences . Hovedforfatteren er Itay Griniasty, en Schmidt AI postdoc-stipendiat i laboratoriet hos Itai Cohen, professor i fysik ved College of Arts and Sciences.
At bygge mindre og mindre maskiner er ikke blot et spørgsmål om at krympe komponenterne. Mens makroskopiske maskiner typisk er designet til at være opdelt i sektioner, opdele en opgave i små bidder og tildele hver til en anden del af maskinen, har proteiner - de essentielle mikroskopiske maskiner, der er ansvarlige for meget af biologi - et andet design. Opgaver opnås ofte ved koordineret bevægelse af alle proteinets komponenter, hvilket gør dem mere robuste over for kaoset i den mikroskopiske verden.
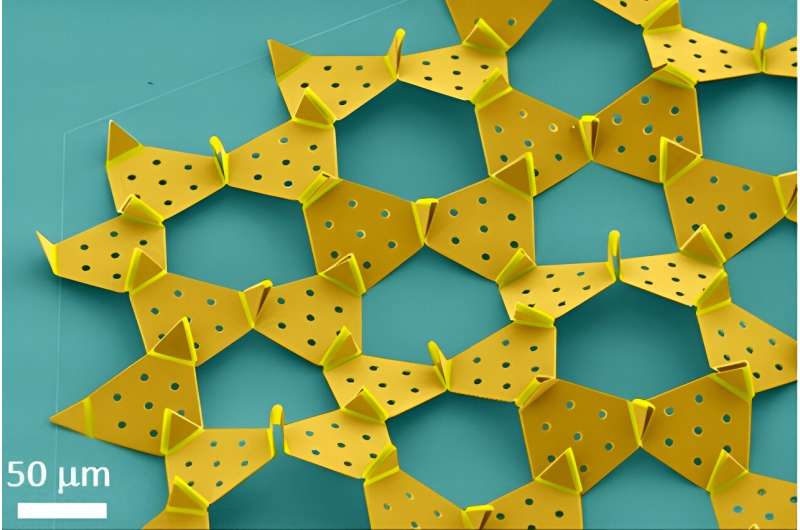
Tidligere har Cohens gruppe brugt origami-principper til at fremstille en stabil af mikroskala-enheder, fra selvfoldende strukturer til gående mikrorobotter, der er innovative for deres størrelse, men relativt grundlæggende i funktion. Tilføjelse af funktionalitet i origami-ark viser sig at være en udfordrende opgave.
"De maskiner, vi har lavet indtil videre, er meget, meget enkle. Men når vi begynder at tænke på, hvordan vi kan øge funktionaliteten i systemer, der er stærkt koblede, begyndte vi at indse, at hver gang du flytter en del af maskinen, andre dele bevæger sig," sagde Cohen. "Det er sindssygt, for du kan ikke isolere noget, det hele hænger sammen i disse ark. Så begyndte vi at spørge, hvordan det bliver gjort i den mikroskopiske verden."
Et protein, sagde de, kunne opfattes som en maskine, der hopper mellem stater som reaktion på små ændringer af nogle få parametre. Forskerne blev inspireret af et eksempel på denne type funktionalitet på makroskala:kolibrien.
En undersøgelse fra 2010 af Andy Ruina, John F. Carr-professor i maskinteknik, viste, hvordan en kolibriens næb kan "blødt åbnes og derefter snappes sammen gennem en passende sekvens af bøjnings- og vridningshandlinger af musklerne i underkæben."
Dette system forklares af en matematisk idé kaldet en spidsbifurkation, hvor næbbet, afhængigt af de kræfter, der udøves af kæbemusklerne, kan have en enkelt stabil tilstand, dvs. lukket, eller to stabile tilstande, både åbne og lukkede. Det punkt, hvor den enkelte stabile tilstand opdeles i to stabile tilstande, er cusp-bifurkationen.
Fordelen ved at arbejde omkring en spidsbifurkation er, at den giver et par vigtige designfunktioner. Den første er topologisk beskyttelse - som sikrer ensartethed i en enheds ydeevne, så hvis kæbemusklerne trækker lidt anderledes, kan næbbet stadig åbne sig og lukkes. Det andet er en løftestangsfordel, som sikrer, at musklerne kun skal bevæge sig en lille smule for at aktivere en stor ændring i næbbet. Det er præcis de komponenter, der er nødvendige for at opnå funktion på mikroskala.
Cohen, Griniasty og deres samarbejdspartnere spekulerede på, om de kunne øge antallet af stater organiseret omkring en bifurkation fra to – dvs. åbne og lukkede – til snesevis eller muligvis hundredvis. Denne udvidelse ville tillade design af maskiner, der udfører komplekse funktioner.
"I stedet for at sammensætte opdelt funktion, ville disse egenskaber dukke op fra hele objektet," sagde Griniasty. "Det er at danse sammen."
Forskerne rekrutterede Teaya Yang '22 og Yuchao Chen '19, begge medforfattere, for at skabe en proof-of-concept makroskala magneto-elastisk model med en sommerfugl-bifurkation, der gjorde det muligt for systemet at snappe eller glide overgangen mellem tre stabile tilstande. Modellen bestod af to paneler, hvoraf det ene bevægede sig i et plan, mens det andet var frit til at dreje rundt om et fast hængsel. Hvert panel var dekoreret med ni magneter, der interagerede med hinanden, hvilket skabte komplekse interaktioner, der minder om dem, der findes i proteiner.
En central udfordring var imidlertid at finde en metode til at designe magnetiske mønstre, der ville anspore den ønskede bifurkation. Griniasty og David Hathcock, Ph.D. '22 overvandt problemet ved at udvikle en algoritme, der byggede på det dynamiske systemarbejde fra John Guckenheimer, A.R. Bullis professor emeritus i matematik (A&S).
"Hvis vi prøvede bare at gætte disse magnetiske mønstre for at generere flere ligevægte, ville vi løbe tør for computerkraft," sagde Cohen. "Så Itay designede en meget flot algoritme, der forenkler søgningen."
Næste skridt bliver at demonstrere konceptet på mikroskala.
"For en 100 mikron maskine, som de typiske robotter, vi laver, beregnede Itay, at vi kunne opnå 20 separate tilstande," sagde Cohen. "Det er sådan set, hvad vi forestiller os kunne laves på mikroskala, en maskine, hvor jeg bruger en aktuator til at flytte et af panelerne, og konfigurationen af hele maskinen kan skifte mellem 20 forskellige konfigurationer. Man kunne have en maskine, der kunne, lad os sige, køre gennem væske, eller måske udføre en kompliceret gribehandling."
Flere oplysninger: Teaya Yang et al, Bifurcation instruerede design af multistate maskiner, Proceedings of the National Academy of Sciences (2023). DOI:10.1073/pnas.2300081120
Journaloplysninger: Proceedings of the National Academy of Sciences
Leveret af Cornell University
 Varme artikler
Varme artikler
-
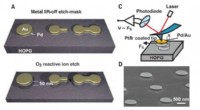 En ny måde at måle friktion mellem højt ordnede pyrolytiske grafitmaterialerEksperimentelle procedurer. (A) Metalmasker bestående af Pd (10 nm) og Au (15 nm) fremstilles på den friskspaltede overflade af en HOPG-prøve ved elektronstrålelitografi og liftoff-teknikker. Mesa-str
En ny måde at måle friktion mellem højt ordnede pyrolytiske grafitmaterialerEksperimentelle procedurer. (A) Metalmasker bestående af Pd (10 nm) og Au (15 nm) fremstilles på den friskspaltede overflade af en HOPG-prøve ved elektronstrålelitografi og liftoff-teknikker. Mesa-str -
 DNA-strenge, der udvælger nanorør, er første skridt til en praktisk kvantetrådPakket ind i deres arbejde:denne molekylære model viser et enkeltstrenget DNA-molekyle (gult bånd) viklet rundt om et lænestol carbon nanorør. Kredit:Roxbury, Jagota/NIST DNA, et molekyle berømt f
DNA-strenge, der udvælger nanorør, er første skridt til en praktisk kvantetrådPakket ind i deres arbejde:denne molekylære model viser et enkeltstrenget DNA-molekyle (gult bånd) viklet rundt om et lænestol carbon nanorør. Kredit:Roxbury, Jagota/NIST DNA, et molekyle berømt f -
 Ny undersøgelse er et skridt i retning af at skabe fly, der rejser med hypersonisk hastighedBinghamton University lektor i maskinteknik Changhong Ke. Kredit:Binghamton University, State University of New York En gennemsnitlig flyvning fra Miami til Seattle tager omkring seks timer og 40
Ny undersøgelse er et skridt i retning af at skabe fly, der rejser med hypersonisk hastighedBinghamton University lektor i maskinteknik Changhong Ke. Kredit:Binghamton University, State University of New York En gennemsnitlig flyvning fra Miami til Seattle tager omkring seks timer og 40 -
 Elektronik spiller efter et nyt sæt regler på molekylær skalaVisualisering af atomare skala af de enkelte molekyleforbindelser dannet med to ækvivalente veje (venstre) og en vej (højre), inklusive bindingen til spidserne af to guldelektroder og et skema over de
Elektronik spiller efter et nyt sæt regler på molekylær skalaVisualisering af atomare skala af de enkelte molekyleforbindelser dannet med to ækvivalente veje (venstre) og en vej (højre), inklusive bindingen til spidserne af to guldelektroder og et skema over de
- Stjernekiggeri ved højlys dag:Hvordan et multi-linse teleskop ændrer astronomi
- Hvordan kan et telt bruge solenergi?
- Identifikation af patogener, der forårsager sojastængelkræft
- Hvordan tv-kameraer påvirker kandidater debatterer succes
- Bioinformatikere slipper af med et unødvendigt trin i proteinstabilitetsanalyse
- Forskere udvikler en reflekterende displayteknik baseret på elektro-mikrofluidisk samling af partik…