


Sådan træner du din robot:Forskning giver nye tilgange
Forstærkningslæring er en type maskinlæring, hvor en agent lærer ved at interagere med sit miljø og modtage belønninger for sine handlinger. I forbindelse med robottræning kan forstærkningslæringsalgoritmer give robotten mulighed for at lære at udføre en opgave, såsom at navigere gennem en forhindringsbane, ved at prøve og fejle. Robotten modtager positive belønninger for vellykkede handlinger og negative belønninger for handlinger, der fører til fiasko, hvilket får den til at lære, hvilke handlinger den skal tage i forskellige situationer.
2. Imitationslæring
Imitationslæring er en metode til at træne robotter ved at give dem mulighed for at observere og efterligne adfærd hos mennesker eller andre robotter. Robotten kan trænes ved hjælp af teknikker som omvendt forstærkningslæring, hvor den lærer belønningsfunktionen, der styrer den adfærd, den observerer, og derefter bruger forstærkningslæring til at optimere sin politik for at maksimere belønningen. Denne tilgang kan være særlig effektiv til opgaver, der kræver menneskelignende fingerfærdighed og hånd-øje-koordination, såsom at gribe genstande eller spille musikinstrumenter.
3. Uovervåget læring
Uovervåget læring er en teknik, hvor en robot lærer fra umærkede data uden eksplicit at blive forsynet med de rigtige svar. Denne tilgang er velegnet til opgaver, hvor mærkede data er begrænset, og gør det muligt for robotten at opdage vigtige mønstre og relationer i dataene. Et eksempel er at bruge uovervåget læring til at lære robotten at genkende og lokalisere et objekt i forskellige miljøer ved at give mange billeder af objektet og lade det lære at identificere karakteristiske træk.
4. Overfør læring
Overførselslæring er en metode, hvor en robot udnytter viden, som tidligere er erhvervet til én opgave, til at lære en anden relateret opgave. Dette kan betydeligt reducere mængden af tid og indsats, der kræves til træning. For eksempel kan en robot, der er uddannet til at navigere gennem et simuleret indendørs miljø, tilpasse sig en virkelig verden udendørs ved at overføre sin tidligere læring.
5. Metalæring
Metalæring, også kaldet at lære at lære, giver robotter mulighed for at lære, hvordan man lærer mere effektivt på tværs af forskellige opgaver. Det er en form for højere ordens læring, hvor robotten i stedet for at lære en enkelt opgave lærer at tilegne sig nye opgaver hurtigere og mere effektivt. Denne evne kan være særlig værdifuld i dynamiske og skiftende miljøer.
Dette er blot nogle få af de forskningsdrevne tilgange, der former måden, vi træner robotter på, og som hver tilbyder unikke fordele afhængigt af opgaven og de tilgængelige ressourcer. Efterhånden som forskningen udvikler sig og nye teknikker dukker op, vil robotteknologien fortsætte med at skubbe grænserne for, hvad der er muligt inden for robotindlæring og -tilpasning.
 Varme artikler
Varme artikler
-
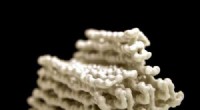 Virkelighedskontrol for DNA-nanoteknologi:Sænkning af barrierer for DNA-baseret nanofremstillingDette 3D-print viser en DNA-baseret struktur designet til at teste en kritisk antagelse-at sådanne objekter kunne realiseres, som designet, med subnanometer præcision. Dette objekt er et relativt stor
Virkelighedskontrol for DNA-nanoteknologi:Sænkning af barrierer for DNA-baseret nanofremstillingDette 3D-print viser en DNA-baseret struktur designet til at teste en kritisk antagelse-at sådanne objekter kunne realiseres, som designet, med subnanometer præcision. Dette objekt er et relativt stor -
 Forskning viser, at celleforstyrrelsessystem kan have medicinske anvendelserDette billede viser leverings-/prøveudtagningssystemet. Kredit:Northwestern McCormick School of Engineering Cellelinjer injiceret med fri nukleinsyre anvendes i vid udstrækning til lægemiddelopdag
Forskning viser, at celleforstyrrelsessystem kan have medicinske anvendelserDette billede viser leverings-/prøveudtagningssystemet. Kredit:Northwestern McCormick School of Engineering Cellelinjer injiceret med fri nukleinsyre anvendes i vid udstrækning til lægemiddelopdag -
 Forskere skaber meget velordnet kunstig spin-is ved hjælp af nanoteknologi(PhysOrg.com) - Et internationalt team af forskere er lykkedes med at skabe kunstig spin-is i en tilstand af termisk ligevægt for første gang, giver dem mulighed for at undersøge den præcise konfigura
Forskere skaber meget velordnet kunstig spin-is ved hjælp af nanoteknologi(PhysOrg.com) - Et internationalt team af forskere er lykkedes med at skabe kunstig spin-is i en tilstand af termisk ligevægt for første gang, giver dem mulighed for at undersøge den præcise konfigura -
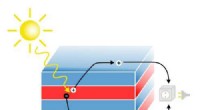 Nyt materiale lover bedre solcellerSollys omdannes til elektrisk strøm i en lagdelt struktur. Forskere ved Wiens teknologiske universitet viser, at en nyligt opdaget klasse af materialer kan bruges til at skabe en ny slags solcelle
Nyt materiale lover bedre solcellerSollys omdannes til elektrisk strøm i en lagdelt struktur. Forskere ved Wiens teknologiske universitet viser, at en nyligt opdaget klasse af materialer kan bruges til at skabe en ny slags solcelle
- Effekter af finansiel uddannelse på kollegiums finansieringsadfærd fremhævet i politisk kort
- Tilføjelse af en polymer stabiliserer sammenfaldende metal-organiske rammer
- Domes, hvordan geodætisk arbejde
- Hvordan planter videregiver genetiske minder
- Hvordan hybride plantesorter kunne løse udfordringerne med fødevaresikkerhed og klimaændringer
- Astronaut Buzz Aldrin ruller den røde løber ud til Mars (opdatering)