


Robot fanger bolden uden kodning
Dette forskningsresultat viser, at robotter intuitivt kan læres at være fleksible af mennesker, da det ikke blev opnået gennem numerisk beregning eller programmering af robottens bevægelser. Kredit:Korea Institute of Science and Technology (KIST)
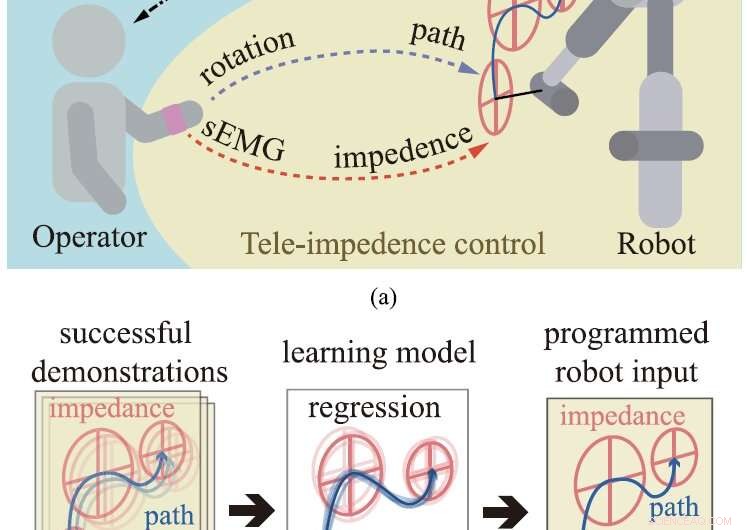
Dr. Kee-hoon Kims team ved Center for Intelligent &Interactive Robotics ved Korea Institute of Science and Technology (KIST) udviklede en måde at undervise i "impedanskontrollerede robotter" gennem menneskelige demonstrationer ved hjælp af overfladeelektromyogrammer (sEMG) af muskler, og det lykkedes at lære en robot at fange en tabt bold som en fodboldspiller. Et overfladeelektromyogram er et elektrisk signal produceret under muskelaktivering, som kan opfanges på hudens overflade.
Nyligt udviklede impedanskontrollerede robotter har åbnet op for en ny æra af robotteknologi baseret på den naturlige elasticitet af menneskelige muskler og led, som konventionelle stive robotter mangler. Robotter med fleksible led forventes at kunne køre, hoppe forhindringer og dyrke sport som mennesker. Imidlertid, den teknologi, der kræves for at lære sådanne robotter at bevæge sig på denne måde, har været utilgængelig indtil for nylig.
KIST-forskerholdet blev det første i verden til at udvikle en måde at lære nye bevægelser til impedanskontrollerede robotter ved hjælp af menneskelige muskelsignaler. Med denne teknologi, som registrerer ikke kun menneskelige bevægelser, men også muskelsammentrækninger gennem sEMG, det er nu blevet muligt for robotter at efterligne bevægelser baseret på menneskelige demonstrationer.
Dr. Kee-hoon Kims team har haft held med at bruge sEMG til at lære en robot hurtigt og behændigt at fange en hurtigt faldende bold, før den kommer i kontakt med en fast overflade eller hopper for langt til at nå - svarende til de færdigheder, som fodboldspillere bruger.
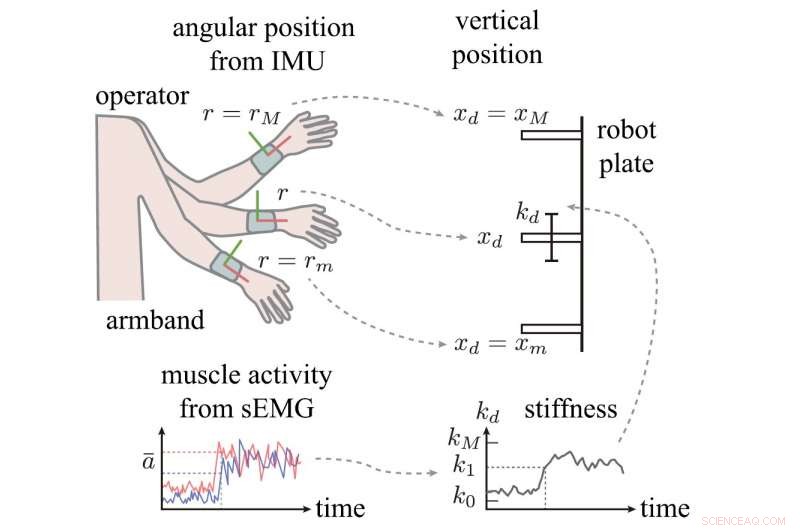
SEMG-sensorer var fastgjort til en mands arm, giver ham mulighed for samtidig at kontrollere placeringen og fleksibiliteten af robottens hurtige op- og nedadgående bevægelser. Kredit:Korea Institute of Science and Technology (KIST)
SEMG-sensorer var fastgjort til en mands arm, giver ham mulighed for samtidig at kontrollere placeringen og fleksibiliteten af robottens hurtige op- og nedadgående bevægelser. Manden "lærte" derefter robotten, hvordan man fange en hurtigt faldende bold ved at give en personlig demonstration. Efter at have lært bevægelsen, robotten var dygtigt i stand til at fange en tabt bold uden ekstern assistance.
Dette forskningsresultat, som viser, at robotter intuitivt kan læres at være fleksible af mennesker, har tiltrukket sig stor opmærksomhed, da det ikke blev opnået gennem numerisk beregning eller programmering af robottens bevægelser. Denne undersøgelse forventes at hjælpe med at fremme studiet af interaktioner mellem mennesker og robotter, bringer os et skridt tættere på en verden, hvor robotter er en integreret del af vores daglige liv.
Kim sagde, "Resultatet af denne undersøgelse, som fokuserer på at lære menneskelige færdigheder til robotter, er en vigtig bedrift i studiet af interaktioner mellem mennesker og robotter."
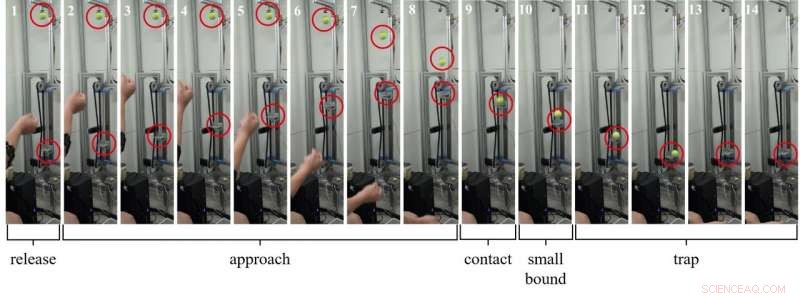
Demonstration af en robot til at fange bold uden kodning. Kredit:Korea Institute of Science and Technology (KIST)
 Varme artikler
Varme artikler
-
 Den digitale tidsalder har desperat brug for etiske og juridiske retningslinjerEt af de presserende spørgsmål, der opstår med kunstig intelligens, er, hvordan man skal redegøre for handlingerne fra maskiner, der selv træffer beslutninger. Kredit:ITU Pictures, licenseret under CC
Den digitale tidsalder har desperat brug for etiske og juridiske retningslinjerEt af de presserende spørgsmål, der opstår med kunstig intelligens, er, hvordan man skal redegøre for handlingerne fra maskiner, der selv træffer beslutninger. Kredit:ITU Pictures, licenseret under CC -
 EU-parlamentet kræver, at Zuckerberg besvarer spørgsmål personligtEU-lovgivere vil have Zuckerberg til at besvare deres spørgsmål personligt, ligesom han gjorde før den amerikanske kongres Europa-Parlamentet krævede onsdag Facebook-chef Mark Zuckerberg at møde o
EU-parlamentet kræver, at Zuckerberg besvarer spørgsmål personligtEU-lovgivere vil have Zuckerberg til at besvare deres spørgsmål personligt, ligesom han gjorde før den amerikanske kongres Europa-Parlamentet krævede onsdag Facebook-chef Mark Zuckerberg at møde o -
 Forskere bruger luftstrømmenes fysik til at lokalisere gaslækager hurtigere i komplekse scenarierDenne robot kan finde ud af kilden til et ethanollækage på en smart måde. I stedet for bare at følge den stærkeste duft, robotten plugger målinger af koncentration og luftstrøm ind i en kompleks parti
Forskere bruger luftstrømmenes fysik til at lokalisere gaslækager hurtigere i komplekse scenarierDenne robot kan finde ud af kilden til et ethanollækage på en smart måde. I stedet for bare at følge den stærkeste duft, robotten plugger målinger af koncentration og luftstrøm ind i en kompleks parti -
 Den meget realistiske ingen:Forskere tager falske billeder til et andet niveauKredit:thispersondoesnotexist.com Vi får masser af information om kunstig intelligens og de baner, den kan væve til at levere falske nyheder. Efterlad lidt plads til flere nyheder, denne gang for
Den meget realistiske ingen:Forskere tager falske billeder til et andet niveauKredit:thispersondoesnotexist.com Vi får masser af information om kunstig intelligens og de baner, den kan væve til at levere falske nyheder. Efterlad lidt plads til flere nyheder, denne gang for
- Special ved solopgang:Solformørkelse begejstrer verdens nordlige lag
- Kina Huawei sagsøger USA for forbundsforbud mod sine produkter
- Påvirkninger af olieudslip kan forstyrre hele madbaner
- Dækafgrøder, kompost og kulstof
- Texas-astronomer genopliver idéen til Ultimately Large Telescope on the Moon
- Ny undersøgelse sætter fokus på den mørke side af venturekapitalistisk finansiering