


Sådan fungerer Kilobots
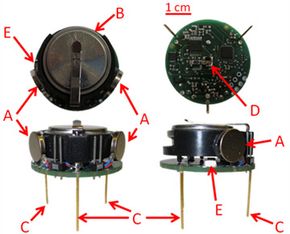 Mød Kilobot. Med uret fra øverste venstre hjørne, du kigger på toppen, bund, set fra siden og forfra, henholdsvis. Du kan også se de forskellige dele af en Kilobot:A) vibrationsmotorer, B) litiumionbatteri, C) støtteben, D) infrarød sender/modtager og E) LED. Se flere robotbilleder. Billede høflighed Michael Rubenstein, Nicholas Hoff og Radhika Nagpal
Mød Kilobot. Med uret fra øverste venstre hjørne, du kigger på toppen, bund, set fra siden og forfra, henholdsvis. Du kan også se de forskellige dele af en Kilobot:A) vibrationsmotorer, B) litiumionbatteri, C) støtteben, D) infrarød sender/modtager og E) LED. Se flere robotbilleder. Billede høflighed Michael Rubenstein, Nicholas Hoff og Radhika Nagpal Efter at have været vært for en yderst sjov madlavning i baghaven med venner, du starter den mindre sjove oprydningsproces. På trods af din beslutsomhed, du vil sandsynligvis efterlade et par krummer - og resterne af din baghavekogning vil sandsynligvis trække et af naturens fineste hold.
Det starter med en sværm af sultne myrer, der går frem mod bunken med knuste kartoffelchips på cementen. Stykke for stykke, myrerne samler krummerne til at bære tilbage til reden. De små insekter arbejder sammen, hjælper med at løfte småkager flere gange deres størrelse. Handler kollektivt, de opnår, hvad et individ ikke kan gøre på egen hånd.
Hvad hvis vi kunne designe robotter som disse myrer, i stand til at arbejde både selvstændigt og som en større helhed? For det meste, Det har været dyrt og tidskrævende at skabe små hære af robotter får forskere til at holde sig til computersimuleringer over den ægte vare.
Gå ind Kilobots . Forskere ved Harvard University skabte de små bots i håb om at skabe en let og billig måde at teste på algoritmer - eller programmerede trin til at løse problemer- på tværs af en gruppe af mange robotter. Fra marts 2012, gruppen havde skabt små sværme af Kilobots, med et større mål om at bygge en "kilobit" Kilobots:et kollektiv på 1, 024 personer (og hvor projektet får sit navn) [kilde:Rubenstein].
Disse enkle maskiner kan hjælpe med at teste og udvikle kompleks adfærd i andre typer robotter. Kilobot-tilhængere siger, at systemet kunne finjustere robotter, der finder og redder mennesker fra kollapsede bygninger eller muligvis hjælper med at rydde op i klæbrige oliekugler fra forurenede miljøer.
Tænk på Kilobots som en testflåde:De vil ikke nødvendigvis besidde de kvaliteter - som hjul - som andre maskiner vil have. Hellere, de er legepladsen, hvor forskere kan eksperimentere og ordne eventuelle problemer med deres programmering, før de sænker deres forskningskroner til større, mere komplekse robotter.
Indhold
- Lav en sværm
- Kilobots i aktion
- Lille bot, Stor indflydelse
- Forfatterens note
Lav en sværm
At kommandere en robot til handling kan være en knibe, men at få en hel gruppe til at operere med samme præcision er ikke så let - eller billigt.
En af de største træk ved Kilobots er deres enkle design og lave pris. Michael Rubenstein, der hjalp med at udvikle robotterne sammen med andre forskere ved Harvard University, siger at holde omkostninger og monteringstid nede var en prioritet.
Hver komponent har en grundlæggende anvendelse, om det bevæger sig rundt eller signalerer til sine mekaniske venner i nærheden. Kilobots er unikke ved, at de forbliver i "dvaletilstand", indtil de indkaldes af overhead -controlleren. En person kan tænde en hel sværm Kilobots "ved" ved at sende et signal - i modsætning til manuelt at tænde hver robot.
Hvis en 1,3 tommer (33 millimeter) Kilobot er, hvad dit hjerte begærer, her er en grundlæggende liste over, hvad du skal bruge for at bringe en til live [kilder:Rubenstein et al., K-Team Corp.]:
- Rundt om, printkort (PCB), der fungerer som bunden af robotten
- Et genopladeligt litiumionbatteri, med et liv mellem tre og 10 timer
- To vibrerende motorer, der skifter robotten i cirkler og i en lige linje (det samme princip, der får en mobiltelefon til at bevæge sig hen over et bord, når den vibrerer)
- Tre stive ben til støtte, der løfter robotten cirka fire femtedele af en tomme (2 centimeter) over en given overflade
- En infrarød lyssender og modtager i flere retninger, placeret på bunden af robotten
- Et LED -lys, i stand til at signalere rødt, grøn og blå
- En overheadcontroller til at sende meddelelser via infrarøde signaler inden for en diameter på cirka 1 meter under enheden
- En kontrolstation - en computer til indtastning af kommandoer
- En ladestation
- Et stort set fladt område ideelt til at reflektere infrarødt lys (normalt en hvid overflade)
Udført med den DIY? Lad os dykke ned i, hvad Kilobots rent faktisk kan.
Bits og BotsDele for hver Kilobot koster mindre end $ 15 - cirka 10 gange billigere end de billigste kollektive robotter fra 2012 [kilde:Rubenstein et al.]. En robot tager cirka fem minutter at samle. Og for programmerings- og roboteksperterne derude, blueprint for disse grundlæggende robotter er open-source, hvilket betyder, at trinene er tilgængelige for alle at bruge. Et firma kaldet K-Team Corporation sælger også samlede Kilobots.
Kilobots i aktion
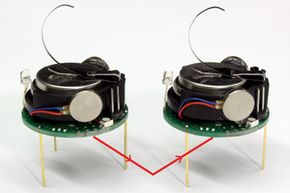 Kiloboten til venstre sender et signal ved at hoppe det af bordet til Kilobot til højre, som modtager det. Billede høflighed Michael Rubenstein, Nicholas Hoff og Radhika Nagpal
Kiloboten til venstre sender et signal ved at hoppe det af bordet til Kilobot til højre, som modtager det. Billede høflighed Michael Rubenstein, Nicholas Hoff og Radhika Nagpal Vi sagde det før. Vi siger det igen:Kilobots er designet til at være de ultimative algoritmetestere.
Lad os sige, at beredskabspersonale ønsker at bringe robotter til stedet for en søge-og-redningsmission. De skulle vide, hvor godt maskinerne kunne kommunikere med hinanden. Det er her, Kilobots er særligt nyttige som testdummier.
Hver robot kan afvise et infrarødt signal fra jorden til en anden bot ved siden af det, giver den mulighed for at fornemme, hvor den er i forhold til andre i sværmen (se billede). At afvise det signal kan også sikre, at ens robot naboer er på samme side for hvornår og hvordan en opgave skal udføres. At vide, hvor andre robotter er, er vigtigt, når det kommer til at lokalisere objekter i et givet miljø og bringe dem tilbage til hjemmebasen.
Indtil nu, der er tre grundlæggende sværmadfærd, Kilobots har mestret:fouragering, dannelseskontrol og synkronisering.
Foraging sådan lyder det:kommanderer flere robotter til at sprede sig og udforske området omkring dem. Med Kilobots, tanken er at fjerne den tid, det tager at fodre på et bestemt sted. Her er det, hvor signalering til andre i sværmen er praktisk. Michael Rubenstein, en forsker, der hjalp med at designe robotterne, siger, at fouragering som en gruppe er langt mere effektiv end individuelt, især i hastende situationer.
"Hvis der er en kollapset bygning fra et jordskælv, og der er en person, der sidder fast i den bygning - hvis du sender en enkelt robot, kan det tage meget længere tid at finde den person, end hvis du sender en stor gruppe robotter for at finde den person, "siger han. Selvom en kollapset bygning og en lejlighed, white board er helt forskellige miljøer, algoritmerne, der bruges til at navigere begge er ens.
En anden vigtig del af effektive sværme er dannelseskontrol , evnen til at opføre sig samlet eller i en bestemt del af sværmen. Ved at opretholde kommunikationen med hinanden, Kilobots besidder en virtuel lejesensor, der giver hver enkelt en realistisk fornemmelse af sin position i gruppen. I stedet for at bruge hardware til at opnå dette, Kilobots nøjes med grundlæggende software og mere avancerede algoritmer. Udførelse af kompleks adfærd med så lidt hardware som muligt omfatter kilobots ånd.
I et system, hvor hver robot forventes at være på den samme side, synkronisering spørgsmål. Hvis en del af sværmen skal udføre en opgave i et bestemt stykke tid og derefter skifte til yderligere sekunder senere, hele gruppen skal have det samme interne ur. En måde at visualisere dette på er at forestille sig en sværm på 1, 000 kilobots, med hver deres LED -lys til at repræsentere en pixel i en større video, der kan ses ovenfra. For at vide hvilken farve der skal signaleres til enhver tid, hver Kilobot skal bruge det samme ur.
Lille bot, Stor indflydelse
Selvom de er akademikere, Kilobots viser løfte i den virkelige verden, også. De er tegnebrætter af slagsen. Sig, at nogle inspirerede forskere drømmer om at bygge en sværm af insektrobotter for at bestøve afgrøder. Han eller hun ville have fordel af at teste Kilobots først.
De små bots kan også kaste lys over sværm intelligens , eller en gruppes kollektive adfærd, og hvordan man bedre kan styre store bander af robotter.
Tag kollektiv transport, for eksempel. Myrer anvender adfærden til at transportere madvarer (som disse kartoffelchips) til deres rede. Forskere har lært, at visse individer - myre og robotter - spiller en særlig rolle i processen. Nogle kan skabe en kædelignende vej, der leder finsnittere tilbage til reden, mens andre har ansvaret for at arbejde sammen om at transportere objektet fra det ene sted til det næste. I Kilobot -arenaen, test af det samme princip kunne hjælpe skolens robotter med at opdage og rydde op i rod i et givet miljø - som olieudslip, for eksempel.
De kan også være nyttige til at lave bedre kort eller snapshots af miljøer. Robotterne kunne gøre dette ved at udforske et område og oprette et rumligt kort til reference. Andre opgaver kan omfatte bestøvning af afgrøder eller ledende søg-og-redningsoperationer [kilde:Rutter].
Michael Rubenstein, en af forskerne, der skabte Kilobots, siger, at fremtidig forskning vil fokusere på at komme med nye algoritmer, der gør det lettere at kontrollere sværmen. Programmering af robotterne til at udføre kollektive transportaktiviteter og finde måder til at skabe nyttige former fra robotterne (som den kollapsede del af en bygning, for eksempel) forbliver prioriteter. Hvem ved, måske vil Kilobots inspirere robotter, der ligner science fiction -favoritterne Transformers. Tanken er at have smart, mindre robotter, der kan oprette forbindelse til en større, mere kraftfuld.
Stadig, Rubenstein siger, at der er masser af plads til forbedringer. Konstruktion af en 1, 000 robot sværm har taget tid. Og selvom Kilobots selvkorrigerer, de mangler præcision, når de rejser på længere afstande.
Forfatterens note
Myrer sværmer til et objekt flere gange deres størrelse og tager det ubesværet op (eller det ser sådan ud). Men der er et helt lag af kommunikation, vi mangler, hvis vi ikke ser nærmere på. Hvis vi vil have intelligente maskiner med lignende muligheder, vi skal tage nogle tip fra naturen. Det, der overraskede mig mest, da jeg skrev om Kilobots, var ikke robotterne selv, men det detaljeringsniveau, der kræves for at få programmer og algoritmer til at fungere. Kilobots skummer kun overfladen, når det kommer til de fascinerende ideer, forskere tester. Disse små, mekaniske hære tjener som en påmindelse om, hvor pæn og kompleks verden er, og det er halvt sjovt at prøve at forstå det.
relaterede artikler
- 10 robotter med beskidte job
- Hvordan har robotter ændret produktion?
- Sådan fungerer militære robotter
- Sådan fungerer politirobotter
- Sådan fungerer robothærerne
- Sådan fungerer robotkirurgi
- Sådan fungerer robotter
- Sådan fungerer Rumble Robots
- Top 5 grønne robotter
- Vil robotter ændre os?
- Bliver robotter gift?
Kilder
- K-Team Mobile Robotics. "Kilobot." (Marts 10, 2012) http://www.k-team.com/mobile-robotics-products/kilobot/introduction
- Rubenstein, Michael. "Sådan fungerer kilobotter." Personligt interview. Marts 13, 2012.
- Rubenstein, Michael, et al. "Kilobot:Et billigt skalerbart robotsystem til kollektiv adfærd." Teknisk rapport. 2011. (10. marts, 2012) .ftp://ftp.deas.harvard.edu/techreports/tr-06-11.pdf
- Rutter, Michael Patrick. "Kilobots forlader reden!" Harvard School of Engineering and Applied Sciences. 21. november kl. 2011. (10. marts, 2012). Http://www.seas.harvard.edu/news-events/press-releases/kilobots-are-leaving-the-nest
Sidste artikel10 robotter med beskidte job
Næste artikel10 mest kopierede arkitekter
 Varme artikler
Varme artikler
-
 Hvordan bifald starter og spredes er underligt videnskabeligtDen franske justitsminister Christiane Taubira klapper under et kampagnemøde i 2015. Jeff Pachoud/AFP/Getty Images Publikum rundt om i verden bryder ud i bifald ved afslutningen af et scenespil ell
Hvordan bifald starter og spredes er underligt videnskabeligtDen franske justitsminister Christiane Taubira klapper under et kampagnemøde i 2015. Jeff Pachoud/AFP/Getty Images Publikum rundt om i verden bryder ud i bifald ved afslutningen af et scenespil ell -
 Sådan beregnes gennemsnitsalderBeregning af gennemsnitsalderen for en gruppe fortæller dig, hvilken alder de fleste af mennesker falder tættest på. Denne statistik har applikationer til flere forskellige felter. For eksempel kan du
Sådan beregnes gennemsnitsalderBeregning af gennemsnitsalderen for en gruppe fortæller dig, hvilken alder de fleste af mennesker falder tættest på. Denne statistik har applikationer til flere forskellige felter. For eksempel kan du -
 Distributiv egenskab med tilføjelse og multiplikation (med eksempler)Når du lærer algebra og ser på komplekse matematiske ligninger, kan du muligvis ridse på hovedet. Det hjælper meget med at nedbryde ligningerne i mindre dele for at løse ligningen. Lov om distribut
Distributiv egenskab med tilføjelse og multiplikation (med eksempler)Når du lærer algebra og ser på komplekse matematiske ligninger, kan du muligvis ridse på hovedet. Det hjælper meget med at nedbryde ligningerne i mindre dele for at løse ligningen. Lov om distribut -
 Droner Opdag Nye Gamle Nazca -linjerEt dronebillede af de nye Nazca -linjer fundet i december 2017 uden for Lima, Peru. Skærmbillede fra YouTube/HowStuffWorks To hundrede fod (60 meter) over den peruvianske ørken, en drone bevæger sig
Droner Opdag Nye Gamle Nazca -linjerEt dronebillede af de nye Nazca -linjer fundet i december 2017 uden for Lima, Peru. Skærmbillede fra YouTube/HowStuffWorks To hundrede fod (60 meter) over den peruvianske ørken, en drone bevæger sig