


En algoritme hjælper med at beskytte Mars Curiositys hjul

En "skræmsel"-rover på NASA's JPL kører over en sensor, mens den tester en ny kørealgoritme. Ingeniører skabte algoritmen til at reducere hjulslid på Mars Curiosity-roveren. Kredit:NASA/JPL-Caltech
Der er ingen mekanik på Mars, så det næstbedste for NASAs Curiosity-rover er forsigtig kørsel.
En ny algoritme hjælper roveren med at gøre netop det. Softwaren, kaldet traction control, justerer hastigheden på Curiositys hjul afhængigt af de klipper, den klatrer op på. Efter 18 måneders test på NASA's Jet Propulsion Laboratory i Pasadena, Californien, softwaren blev uploadet til roveren på Mars i marts. Mars Science Laboratorys missionsledelse godkendte det til brug den 8. juni, efter omfattende test på JPL og flere test på Mars.
Allerede før 2013, da hjulene begyndte at vise tegn på slid, JPL-ingeniører havde undersøgt, hvordan man kunne reducere virkningerne af den robuste Mars-overflade. På jævnt terræn, alle roverens hjul drejer med samme hastighed. Men når et hjul kører over ujævnt terræn, hældningen får hjulene bag eller foran den til at begynde at glide.
Denne ændring i trækkraft er især problematisk, når man går over spidse, indlejrede sten. Når dette sker, hjulene foran trækker baghjulene ind i sten; hjulene bagved skubber de forreste hjul ind i sten.
I begge tilfælde, klatrehjulet kan ende med at opleve højere kræfter, fører til revner og punkteringer. Slidbanerne på hvert af Curiositys seks hjul, kaldet grouser, er designet til at klatre på klipper. Men mellemrummene mellem dem er mere udsatte.
"Hvis det er en spids sten, det er mere tilbøjeligt til at trænge ind i huden mellem hjulryperne, " sagde Art Rankin fra JPL, testteamlederen for traction control softwaren. "Hjulslidet har givet anledning til bekymring, og selvom vi vurderer, at de stadig har leveår i sig, vi ønsker at reducere det slid, når det er muligt for at forlænge hjulenes levetid."
Traction control-algoritmen bruger realtidsdata til at justere hvert hjuls hastighed, reducere trykket fra klipperne. Softwaren måler ændringer i affjedringssystemet for at finde ud af kontaktpunkterne for hvert hjul. Derefter, den beregner den korrekte hastighed for at undgå glidning, forbedring af roverens trækkraft.
Under test hos JPL, hjulene blev drevet over en seks-tommer (15-centimeter) kraftmomentsensor på fladt terræn. Førende hjul oplevede en belastningsreduktion på 20 procent, mens mellemhjul oplevede en belastningsreduktion på 11 procent, sagde Rankin.
Traction control løser også problemet med wheelies. Lejlighedsvis, et klatrehjul vil blive ved med at stige, løfter den faktiske overflade af en sten, indtil den er frit-snurrende. Det øger kræfterne på de hjul, der stadig er i kontakt med terræn. Når algoritmen registrerer en wheelie, den justerer hastighederne på de andre hjul, indtil det stigende hjul er tilbage i kontakt med jorden.
Rankin sagde, at traktionskontrolsoftwaren i øjeblikket er slået til som standard, men kan slukkes efter behov, såsom til regelmæssigt planlagt hjulbillede, når holdet vurderer hjulslid.
Softwaren er udviklet hos JPL af Jeff Biesiadecki og Olivier Toupet. JPL, en afdeling af Caltech i Pasadena, styrer Curiosity-missionen for NASA.
Sidste artikelKepler har lært os, at klippeplaneter er almindelige
Næste artikelBillede:3-D-printede planetmodeller
 Varme artikler
Varme artikler
-
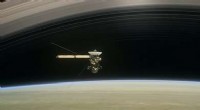 Sidste eventyr forude for NASAs Cassini -rumfartøj ved SaturnDette billede, der blev stillet til rådighed af NASA i april 2017, viser et stillbillede fra kortfilmen Cassinis Grand Finale, med rumfartøjet, der dykker mellem Saturn og planetens inderste ring. La
Sidste eventyr forude for NASAs Cassini -rumfartøj ved SaturnDette billede, der blev stillet til rådighed af NASA i april 2017, viser et stillbillede fra kortfilmen Cassinis Grand Finale, med rumfartøjet, der dykker mellem Saturn og planetens inderste ring. La -
 Sorte hul-film kommer snart, siger førende astronomKredit:NSF På det tidspunkt, hvor en international gruppe af videnskabsmænd bedøvede verden med det første billede nogensinde af et sort hul, de planlagde allerede en efterfølger:en film, der vise
Sorte hul-film kommer snart, siger førende astronomKredit:NSF På det tidspunkt, hvor en international gruppe af videnskabsmænd bedøvede verden med det første billede nogensinde af et sort hul, de planlagde allerede en efterfølger:en film, der vise -
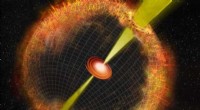 VLA himmelundersøgelse afslører første forældreløse gammastråleudbrudKunstnerens opfattelse af et gammastråleudbrud. Jet af hurtigt bevægende materiale drives udad gennem en sfærisk skal af udstødt materiale fra den første eksplosion af en massiv stjerne og dens kollap
VLA himmelundersøgelse afslører første forældreløse gammastråleudbrudKunstnerens opfattelse af et gammastråleudbrud. Jet af hurtigt bevægende materiale drives udad gennem en sfærisk skal af udstødt materiale fra den første eksplosion af en massiv stjerne og dens kollap -
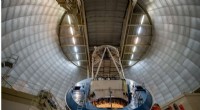 5000 øjne på himlen:Forskere koreograferer robotter for at observere fjerne galakserForskere er begyndt at betjene Dark Energy Spectroscopic Instrument, eller DESI, at skabe et 3D-kort over over 30 millioner galakser og kvasarer, der vil hjælpe dem med at forstå naturen af mørk ene
5000 øjne på himlen:Forskere koreograferer robotter for at observere fjerne galakserForskere er begyndt at betjene Dark Energy Spectroscopic Instrument, eller DESI, at skabe et 3D-kort over over 30 millioner galakser og kvasarer, der vil hjælpe dem med at forstå naturen af mørk ene
- En cyklisk fosfatbaseret elektrolyt til sikre og højspændings lithium-ion-batterier
- Mindre vand, samme Texas bomuld:Undersøgelse isolerer de bedste kunstvandingsmønstre for at spare …
- Påvirker private shuttles pålideligheden af offentlig transport?
- Microsoft-patch afventede for nul-dages sårbarhed
- Hvordan kommunikerer fugle?
- Nanopartikler forbedrer tumorbehandling hos mus