


Firebenede springrobotter til at udforske månen

LEAP-roveren er baseret på den benede robot, ANYmal, udviklet på ETH Zürich og dens spin-off ANYbotics. Kredit:ETH Zürich/RSL Robotics Labs
En firbenet robot trænet gennem kunstig intelligens har lært den samme lektie som Apollo-astronauterne - at hop kan være den bedste måde at bevæge sig rundt på månens overflade. En opdatering om LEAP (Legged Exploration of the Aristarchus Plateau), en missionskonceptundersøgelse støttet af ESA for at udforske nogle af de mest udfordrende måneterræner, er blevet præsenteret i dag på Europlanet Science Congress (EPSC) 2022 i Granada af Patrick Bambach.
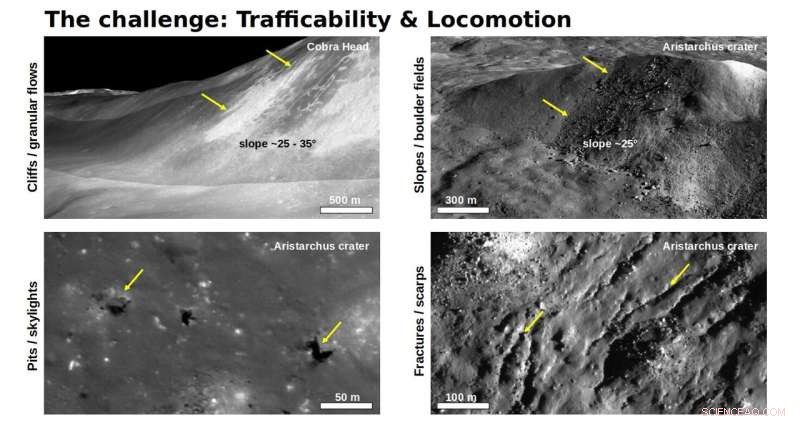
"LEAPs mål er Aristarchus-plateauet, en region på månen, der er særlig rig på geologiske træk, men meget udfordrende at få adgang til," sagde Patrick Bambach fra Max Planck Institute for Solar System Research i Tyskland. "Med robotten kan vi undersøge nøglefunktioner for at studere månens geologiske historie og udvikling, såsom udkastet omkring kratere, friske nedslagssteder og kollapsede lavarør, hvor materialet muligvis ikke er blevet ændret af rumforvitring og andre processer. "
LEAP-teamet arbejder på, at robotten bliver integreret på ESA's European Large Logistic Lander (EL3), som er planlagt til at lande på månen flere gange fra slutningen af 2020'erne til begyndelsen af 2030'erne. LEAP er baseret på den benede robot, ANYmal, udviklet på ETH Zürich og dens spin-off ANYbotics. Den er i øjeblikket tilpasset månemiljøet af et konsortium fra ETH Zürich, Max Planck Institute for Solar System Research, OHB, University of Münster og Open University.

Forskellige versioner af den benede robot, ANYmal, udviklet på ETH Zürich og dens spin-off ANYbotics. Kredit:ETH Zürich/RSL Robotics Labs
"Traditionelle rovere har muliggjort store opdagelser på månen og Mars, men har begrænsninger," sagde Bambach. "At udforske terræn med løs jord, store kampesten eller skråninger over 15 grader er særligt udfordrende med hjul. For eksempel fik Mars-roveren, Spirit, sin mission afsluttet, da den sad fast i sandet."
ANYmal kan bevæge sig i forskellige gangarter, hvilket gør den i stand til at tilbagelægge store afstande på kort tid, klatre op ad stejle skråninger, indsætte videnskabelige instrumenter og endda komme sig i det usandsynlige tilfælde af et fald. Robotten kan også bruge sine ben til at grave kanaler i jorden, vende kampesten eller mindre sten til yderligere inspektion og tage prøver.
I første omgang er robotten blevet trænet ved hjælp af en Reinforcement Learning-tilgang i et virtuelt miljø for at simulere månens terræn, tyngdekraft og støvegenskaber. Den er også blevet indsat i marken til en udendørs vandretur.
-
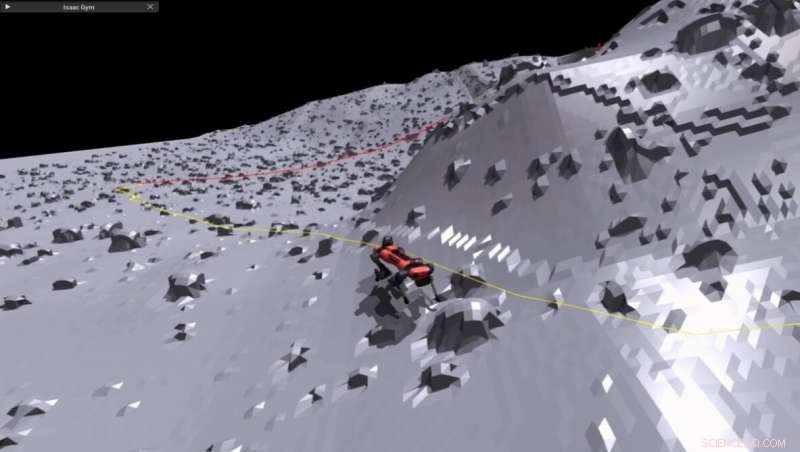
LEAP-roveren trænes ved at bruge en Reinforcement Learning-tilgang i et virtuelt miljø for at simulere månens terræn, tyngdekraft og støvegenskaber. Kredit:ETH Zürich/RSL Robotics Labs
-

LEAP (Legged Exploration of the Aristarchus Plateau) er en missionskonceptundersøgelse finansieret af ESA for at udforske nogle af de mest udfordrende måneterræner. Kredit:ETH Zürich/RSL Robotics Labs
-
LEAPs mål er Aristarchus-plateauet, en region på Månen, der er særligt rig på geologiske træk, men meget udfordrende at få adgang til. Kredit:NASA/ESA
"Interessant nok begyndte ANYmal at bruge en springlignende bevægelsesmåde, ligesom Apollo Astronauts gjorde - og indså, at spring kan være mere energieffektivt end at gå," sagde Bambach.
Det nuværende design forbliver under 100 kg og inkluderer 10 kg videnskabelig nyttelastmasse, der teoretisk er i stand til at bære multispektrale sensorer, jordgennemtrængende radar, massespektrometre, gravimetre og anden instrumentering.
"LEAPs evne til at indsamle udvalgte prøver og bringe dem til et lander- eller opstigningskøretøj giver yderligere spændende muligheder for at prøve en returmission i meget udfordrende miljøer på månen eller Mars," sagde Bambach. + Udforsk yderligere
Ved at bruge C-formede hjul kan denne rover klatre over mere udfordrende måneterræn
 Varme artikler
Varme artikler
-
 To kosmiske påfugle viser magellanske skyers voldelige historieALMA billeder af to molekylære skyer:N159E-Papillon Nebula (venstre) og N159W South (højre). Rød og grøn viser fordelingen af molekylær gas med forskellige hastigheder kortlagt af 13CO-emissioner. D
To kosmiske påfugle viser magellanske skyers voldelige historieALMA billeder af to molekylære skyer:N159E-Papillon Nebula (venstre) og N159W South (højre). Rød og grøn viser fordelingen af molekylær gas med forskellige hastigheder kortlagt af 13CO-emissioner. D -
 NOAA deler det første billede fra GOES-18 SUVI-instrumentKredit:NOAA Solar Ultraviolet Imager, eller SUVI, ombord på NOAAs GOES-18-satellit, som blev opsendt den 1. marts 2022, begyndte at observere solen den 24. juni 2022. SUVI overvåger solen i den eks
NOAA deler det første billede fra GOES-18 SUVI-instrumentKredit:NOAA Solar Ultraviolet Imager, eller SUVI, ombord på NOAAs GOES-18-satellit, som blev opsendt den 1. marts 2022, begyndte at observere solen den 24. juni 2022. SUVI overvåger solen i den eks -
 Blodmåneformørkelse glæder unge kenyanereEn mand kigger gennem et teleskop, der var opsat for at lade lokalsamfundet ved Magadi -søen i Kenya se måneformørkelsen fredag Mars, Pluto, Saturn, Jupiter, Venus - Merkur, det var den jeg virkel
Blodmåneformørkelse glæder unge kenyanereEn mand kigger gennem et teleskop, der var opsat for at lade lokalsamfundet ved Magadi -søen i Kenya se måneformørkelsen fredag Mars, Pluto, Saturn, Jupiter, Venus - Merkur, det var den jeg virkel -
 Hubbles majestætiske spiral i PegasusKredit:NASA Dette NASA/ESA Hubble-rumteleskopbillede viser en spiralgalakse kendt som NGC 7331. Først opdaget af den produktive galaksejæger William Herschel i 1784, NGC 7331 er placeret omkring 4
Hubbles majestætiske spiral i PegasusKredit:NASA Dette NASA/ESA Hubble-rumteleskopbillede viser en spiralgalakse kendt som NGC 7331. Først opdaget af den produktive galaksejæger William Herschel i 1784, NGC 7331 er placeret omkring 4
- Coronavirus:Udledningen af nitrogendioxid falder over Italien
- Dataforskere og seismologer bruger dyb tremor til at forudsige kraftige jordskælv
- Kan tranebær erobre verden? En amerikansk industri afhænger af det
- Deep learning-gentænkning overvinder en stor hindring i AI-industrien
- En speciel elementær magi
- Slå DNA og RNA til og fra