


Forskning i dynamik og FNTSM-kontrol af rumfartøjer med et filmoptagelseslommesystem
I de senere år, med den betydelige stigning i rumopsendelsesaktiviteter, er antallet af deorbiterede rumfartøjer steget kraftigt, hvilket har haft en alvorlig indvirkning på både aktive kredsende rumfartøjer og fremtidige rumaktiviteter. Traditionelle rebnetfangstsystemer, der tjener som en teknologi til aktivt at deorbitere rumfartøjer, rummer et stort potentiale til at afbøde og rydde rumaffald.
Rebsystemer står dog over for udfordringer såsom vanskeligheder med at bevare formen over længere perioder, modtagelighed for selvsammenfiltring, energitab og en reduktion af det effektive fangstområde. I modsætning hertil kan tynde film foldes og udfoldes langs almindelige former, hvilket giver større fleksibilitet og pålidelighed sammenlignet med tøjringer. De fremstår som en effektiv løsning på sammenfiltringsproblemet og præsenterer en lovende metode til afbødning og fjernelse af rumaffald.
I en oversigtsartikel for nylig offentliggjort i Space:Science &Technology , Professor Wei Chengs team ved Harbin Institute of Technology har i samarbejde med forskere fra Beijing Institute of Control Engineering og Benha University designet et tyndt filmoptagelseslommesystem.
Imidlertid er den fleksible struktur af dette system tilbøjelig til betydelig deformation og vibrationer under bevægelse, hvilket resulterer i betydelig interferens med rumfartøjsoperationer. For kvantitativt at analysere disse forstyrrelser fokuserer denne undersøgelse på dynamisk modellering og holdningskontrol af tyndfilmslommefangstsystemet.
Forskningen involverer udviklingen af en hurtig nonsingular terminal sliding mode controller (FNTSM) og en fast tidsudvidelsesobservatør (FxESO) integreret i en attitude-tracking kontrollov. Styringens effektivitet valideres gennem etablering af en virtuel prototype. Denne forskning giver teoretisk støtte til den fremtidige anvendelse af systemet i kredsløb.
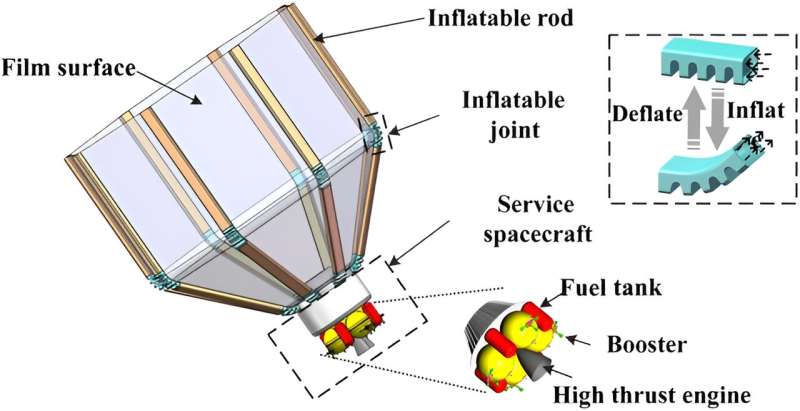
Først skal du etablere modellen for opsamlingslommesystemet. Ved at bruge en stor fleksibel membranstruktur understøttet af oppustelige stænger danner den øvre del et ottekantet prisme, der giver en stor indhylling til indfangningsmekanismen, mens den nederste del antager en cylindrisk form.
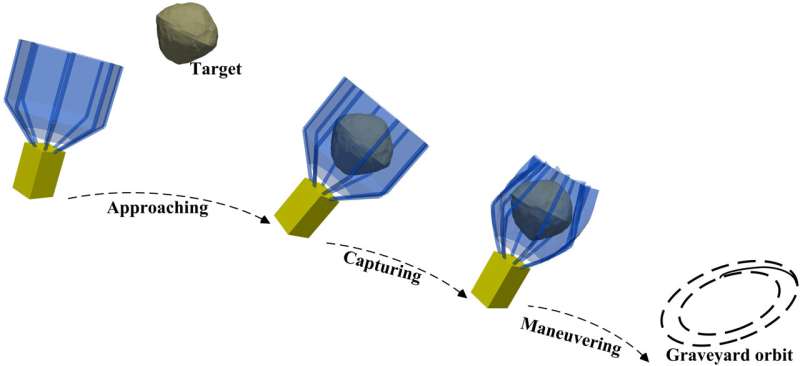
Systemets udfoldelse og tilbagetrækning opnås gennem justering af oppustning og tømning ved hjælp af oppustelige fleksible led. Systemets arbejdsproces er hovedsageligt i 3 faser. For det første bliver rumfartøjssystemet drevet af højtryksmotoren for at nærme sig det erobrede mål. Derefter pustes oppustelige fleksible led op for at omslutte målet. Endelig manøvrer servicerumfartøjet aktivt for at trække det fangede mål ind i kirkegårdens kredsløb.
Brug derefter Absolute Nodal Coordinate Formulation (ANCF) til at etablere den dynamiske model af tyndfilmslommefangstsystemet. Anvend højordens ANCF-elementer med 8 noder til at beskrive filmoverfladens bevægelse, der repræsenterer den globale positionsvektor gennem interpolationspolynomier Φi (xi , yi ).
Beskriv deformationen af materialepunkter ved hjælp af Green-Lagrange-tøjningstensoren og indsæt den i den globale positionsvektorgradienttensor J i at udlede elementets bevægelsesligninger. Anvend princippet om virtuelt arbejde til at udlede elementets kinematiske ligninger. Desuden introducer du controlleren u , vinkelhastighed ω( ω) , og unit quaternion q .
Udled derivaterne af holdningssporingsfejl, inklusive vinkelhastighedsfejl ω e og holdningsrotationsmatrix A qe . Endelig inkorporerer virkningerne af rumfartøjets inertimoment J R og ekstern forstyrrelse d , udled rumfartøjets attitude dynamiske ligninger.
-
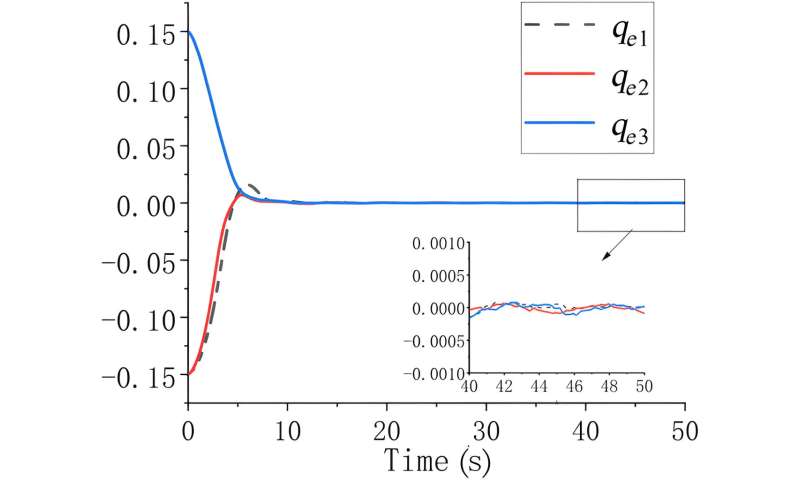
Holdningsfejl qe kurver. Kredit:Rum:Videnskab og teknologi -
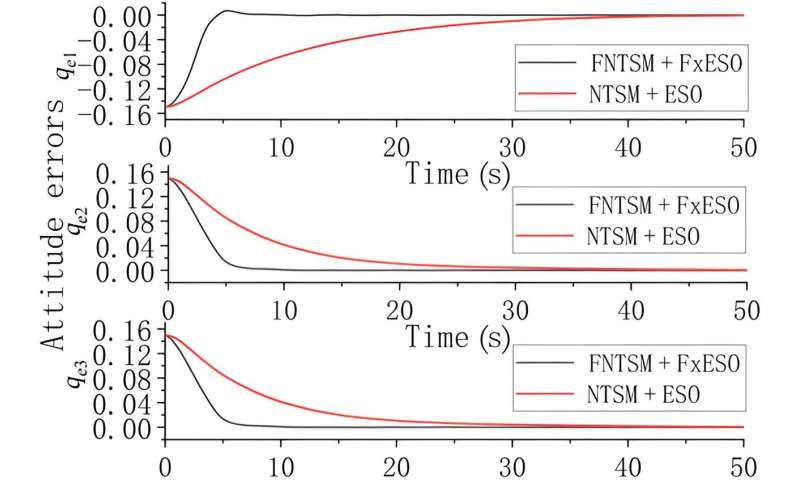
Sammenligning mellem FNSMC + FxESO og NTSM + ESO. Kredit:Rum:Videnskab og teknologi
Efterfølgende har forfatteren, der bygger på ikke-lineær glidende tilstandskontrol, udtænkt en Fast Terminal Sliding Mode (FTSM) overflade F . For at forhindre singularitetsproblemer i FTSM er en Fast Nonsingular Terminal Sliding Mode (FNTSM) overflade F designet, når |q ei | <ψ .
Introduktionen af en FxESO (Fixed-Time Extended State Observer) involverer design af de dynamiske ligninger for observationsfejl, hvilket muliggør estimering af usikkerheder. Endelig, baseret på FTNSM og FxESO, er en rumfartøjscontroller designet til at opnå konvergens og stabilitet inden for en begrænset tid.
Herefter etablerede forfatteren en virtuel prototype og udførte numeriske simuleringsanalyser af den relevante dynamik og kontrolteorier. Undersøgelsen afslørede, at systemet efter rumfartøjets holdningsmanøvrer gradvist stabiliserede sig.
Der var dog stadig vibrationer i de fleksible stænger, hvilket forhindrede membranen i at blive helt strammet, hvilket resulterede i kontinuerlige rynker på membranoverfladen. Derudover blev FNTSM + FxESO controlleren sammenlignet med Nonsingular Terminal Sliding Mode (NTSM) + Expansion Observer (ESO) controlleren, og holdningsfejlene under denne controller blev analyseret.
Resultaterne indikerer, at FNTSM + FxESO-controlleren bringer rumfartøjet til den ønskede stilling efter 10 sekunder, hvilket er cirka 25 sekunder hurtigere sammenlignet med NTSM + ESO-controlleren. Dette forbedrer konvergenshastigheden for systemets holdningsfejl betydeligt.
Desuden kan denne controller effektivt undertrykke vibrationer med høj amplitude og holde steady-state holdningsfejlen på størrelsesordenen 10 -4 . Dette demonstrerer den foreslåede controllers høje effektivitet, præcision og stabilitet.
Flere oplysninger: Zhuoran Huang et al., Dynamics and FNTSM Control of Spacecraft with a Film Capture Pocket System, Space:Science &Technology (2023). DOI:10.34133/space.0079
Leveret af Beijing Institute of Technology Press Co., Ltd
 Varme artikler
Varme artikler
-
 Forskere udpeger placeringen af ekstremt energirige partikler i en rumsøkoKredit:SAMAR SAFI-HARB ET AL. (2022) Et internationalt hold af astrofysikere har identificeret stedet, hvor kraftfulde og meget energiske røntgenstråler bliver skudt ud i rummet inde fra en region
Forskere udpeger placeringen af ekstremt energirige partikler i en rumsøkoKredit:SAMAR SAFI-HARB ET AL. (2022) Et internationalt hold af astrofysikere har identificeret stedet, hvor kraftfulde og meget energiske røntgenstråler bliver skudt ud i rummet inde fra en region -
 Fem ting skulle lære af Europas Solar Orbiter-missionSolar Orbiter vil lade os se solen i hidtil usete detaljer, potentielt inkluderet den første nogensinde udsigt til solens poler. Kredit:ESA/ATG medialab Klokken 23.03 (lokal tid) søndag den 9. feb
Fem ting skulle lære af Europas Solar Orbiter-missionSolar Orbiter vil lade os se solen i hidtil usete detaljer, potentielt inkluderet den første nogensinde udsigt til solens poler. Kredit:ESA/ATG medialab Klokken 23.03 (lokal tid) søndag den 9. feb -
 Dråbestjerne afslører skjult supernova-domKunstnerens indtryk af HD265435-systemet omkring 30 millioner år fra nu, med den mindre hvide dværg, der forvrænger den varme underdværg til en tydelig dråbeform. Kredit:University of Warwick/Mark Gar
Dråbestjerne afslører skjult supernova-domKunstnerens indtryk af HD265435-systemet omkring 30 millioner år fra nu, med den mindre hvide dværg, der forvrænger den varme underdværg til en tydelig dråbeform. Kredit:University of Warwick/Mark Gar -
 ALMA kortlægger Europas temperaturKredit:ALMA (ESO/NAOJ/NRAO), S. Trumbo et al .; NRAO/AUI NSF, S. Dagnello; NASA/Hubble Jupiters iskolde måne Europa har et kaotisk overfladeterræn, der er brudt og revnet, tyder på en mangeårig hi
ALMA kortlægger Europas temperaturKredit:ALMA (ESO/NAOJ/NRAO), S. Trumbo et al .; NRAO/AUI NSF, S. Dagnello; NASA/Hubble Jupiters iskolde måne Europa har et kaotisk overfladeterræn, der er brudt og revnet, tyder på en mangeårig hi
- Sjældne jordelementer og gamle miner giver problemer for de vestlige amerikanske vandforsyninger
- Sådan konverteres omdrejningstal til fødder per minut
- Et problem på 3 milliarder dollars:Miami-Dades septiktanke svigter allerede på grund af havstignin…
- Klimaændringer og habitatkonvertering kombineres for at homogenisere naturen
- Great Barrier Reef-undersøgelse viser, hvordan revet kan klare en hurtig stigning i havniveauet
- Tværfagligt samarbejde giver sværest, tyndeste belægninger endnu opdaget