


Gør computeranimation mere smidig, akrobatisk - og realistisk
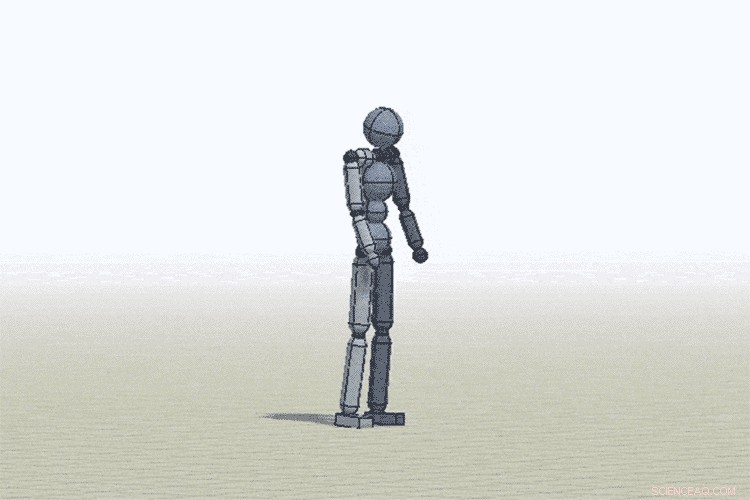
UC Berkeley computerforskere udviklede en algoritme, der bruger forstærkningslæring til at generere realistiske simuleringer af mennesker og dyrs bevægelse, såsom denne tilbagefald i realtid. Den samme algoritme fungerer til 25 akrobatiske og danse -tricks, med en måneds læring påkrævet pr. færdighed. Kredit:Jason Peng, UC Berkeley
Det er stadig let at fortælle computersimulerede bevægelser fra den ægte vare - på storskærm eller i videospil, simulerede mennesker og dyr bevæger sig ofte klodset, uden rytme og flydende af deres virkelige modstykker.
Men det ændrer sig. University of California, Berkeley -forskere har nu gjort et stort fremskridt inden for realistisk computeranimation, ved hjælp af dyb forstærkningslæring til at genskabe naturlige bevægelser, selv for akrobatiske bedrifter som breakdance og kampsport. De simulerede tegn kan også reagere naturligt på ændringer i miljøet, såsom at komme sig efter at snuble eller blive pellet af projektiler.
"Dette er faktisk et ret stort spring fra det, der er blevet gjort med dyb læring og animation. Tidligere har meget arbejde er gået i at simulere naturlige bevægelser, men disse fysikbaserede metoder har en tendens til at være meget specialiserede; de er ikke generelle metoder, der kan håndtere en lang række færdigheder, "sagde UC Berkeley kandidatstuderende Xue Bin" Jason "Peng. Hver aktivitet eller opgave kræver typisk sin egen specialdesignede controller.
"Vi udviklede mere dygtige agenter, der opfører sig på en naturlig måde, "sagde han." Hvis du sammenligner vores resultater med motion-capture optaget fra mennesker, vi er ved at nå det punkt, hvor det er ret svært at skelne de to, at fortælle, hvad der er simulering, og hvad der er reelt. Vi bevæger os mod en virtuel stuntman. "
Arbejdet kan også inspirere til udvikling af mere dynamiske motoriske færdigheder til robotter.
Et papir, der beskriver udviklingen, er betinget accepteret til præsentation på SIGGRAPH -konferencen 2018 i Vancouver i august, Canada, og blev lagt online 10. april. Pengs kolleger i Institut for Elektroteknik og Computer Science er professor Pieter Abbeel og adjunkt Sergey Levine, sammen med Michiel van de Panne fra University of British Columbia.
Mocap til DeepMimic
Traditionelle teknikker inden for animation kræver typisk, at man designer specialtilpassede controllere for hver færdighed:en controller til at gå, for eksempel, og en anden til løb, vendinger og andre bevægelser. Disse hånddesignede controllere kan se godt ud, Sagde Peng.
Alternativt kan dybe forstærkningsmetoder, såsom GAIL, kan simulere en række forskellige færdigheder ved hjælp af en enkelt generel algoritme, men deres resultater ser ofte meget unaturlige ud.
"Fordelen ved vores arbejde, "Sagde Peng, "er, at vi kan få det bedste fra begge verdener. Vi har en enkelt algoritme, der kan lære en række forskellige færdigheder, og frembringe bevægelser, der konkurrerer, hvis de ikke overgår den nyeste teknik i animation med håndlavede controllere. "
For at opnå dette, Peng hentede referencedata fra motion-capture (mocap) klip, der demonstrerede mere end 25 forskellige akrobatiske bedrifter, såsom backflips, vognhjul, kip-ups og hvælvinger, samt enkel løb, kaster og hopper. Efter at have leveret mocap -data til computeren, holdet tillod derefter systemet - kaldet DeepMimic - at "øve" hver færdighed i cirka en måneds simuleret tid, lidt længere tid end et menneske kan tage for at lære den samme færdighed.
Computeren øvede døgnet rundt, gennemgå millioner af forsøg for at lære at realistisk simulere hver færdighed. Det lærte gennem forsøg og fejl:at sammenligne dets ydeevne efter hvert forsøg med mocap -data, og tilpasning af dens adfærd for mere tæt at matche den menneskelige bevægelse.
"Maskinen lærer disse færdigheder helt fra bunden, før den overhovedet ved, hvordan man går eller løber, så en måned er måske ikke for urimelig, " han sagde.
Nøglen var at lade maskinen lære på måder, som mennesker ikke gør. For eksempel, en tilbagefald indebærer så mange individuelle kropsbevægelser, at en maskine kan blive ved med at falde og aldrig komme forbi de første trin. I stedet, algoritmen begynder at lære på forskellige stadier af backflipen - herunder i luften - for at lære hvert trin i bevægelsen separat og derefter sy dem sammen.
Overraskende, engang trænet, de simulerede figurer er i stand til at håndtere og komme sig efter aldrig før sete forhold:at køre over uregelmæssigt terræn og lave spin-spark, mens de bliver pælt af projektiler.
"Gendannelserne kommer gratis fra læreprocessen, "Sagde Peng.
Og den samme enkle metode fungerede for alle de mere end 25 færdigheder.
"Da vi først startede, vi troede, vi ville prøve noget simpelt, som udgangspunkt for senere metoder, ikke forventet at det skulle fungere. Men den meget enkle metode fungerer faktisk rigtig godt. Dette viser, at en simpel tilgang faktisk kan lære et meget rigt repertoire af stærkt dynamiske og akrobatiske færdigheder. "
 Varme artikler
Varme artikler
-
 Ford skal skære over 5, 000 tyske job i europæisk eftersynNedskæring af arbejdspladser på den mest socialt ansvarlige måde Ford sagde fredag, at den planlagde at skære mere end 5, 000 job i Tyskland som led i en større omstrukturering for at øge rentabil
Ford skal skære over 5, 000 tyske job i europæisk eftersynNedskæring af arbejdspladser på den mest socialt ansvarlige måde Ford sagde fredag, at den planlagde at skære mere end 5, 000 job i Tyskland som led i en større omstrukturering for at øge rentabil -
 En ny teknik til billigt at gøre papir berøringsfølsomtKredit:Yang Zhang og Chris Harrison Et par forskere ved Carnegie Mellon University har udviklet en måde at gøre almindeligt papir berøringsfølsomt på. Yang Zhang og Chris Harrison har skrevet et p
En ny teknik til billigt at gøre papir berøringsfølsomtKredit:Yang Zhang og Chris Harrison Et par forskere ved Carnegie Mellon University har udviklet en måde at gøre almindeligt papir berøringsfølsomt på. Yang Zhang og Chris Harrison har skrevet et p -
 Huawei forsvarer globale ambitioner midt i vestlig frygt for sikkerhedHuawei har haft et hårdt år, med nogle af dets tjenester afvist i USA, Australien, New Zealand, Storbritannien, Japan, Frankrig og Tyskland over sikkerhedsproblemer Huawei forsvarede tirsdag sine
Huawei forsvarer globale ambitioner midt i vestlig frygt for sikkerhedHuawei har haft et hårdt år, med nogle af dets tjenester afvist i USA, Australien, New Zealand, Storbritannien, Japan, Frankrig og Tyskland over sikkerhedsproblemer Huawei forsvarede tirsdag sine -
 3-D-strikkede skaller sparer på byggematerialer og tidKredit:Lex Reiter Med blot et tryk på en knap, ETH-forskere strikker et tekstil, der fungerer som det primære formelement for buede betonskaller. Nu har de brugt den nye teknologi til at skabe en
3-D-strikkede skaller sparer på byggematerialer og tidKredit:Lex Reiter Med blot et tryk på en knap, ETH-forskere strikker et tekstil, der fungerer som det primære formelement for buede betonskaller. Nu har de brugt den nye teknologi til at skabe en
- Luftforurening i New York City er forbundet med skovbrande hundreder af kilometer væk
- Udtryk dig selv:Forskere bruger genetisk algoritme til at designe selvsamlende ssDNA-podede partikle…
- Muslingerev øger risikoen for mikroplastik eksponering og forbrug
- Mere opmærksomhed på idiomer hjælper andresprogselever
- Eksotisk tilstand af stof - en tilfældig solid løsning - påvirker, hvordan ioner bevæger sig gen…
- Grafen på vej til at erobre Silicon Valley