


Army's nye 3-D-printede formskiftende bløde robotter kravler, hoppe, tag fat
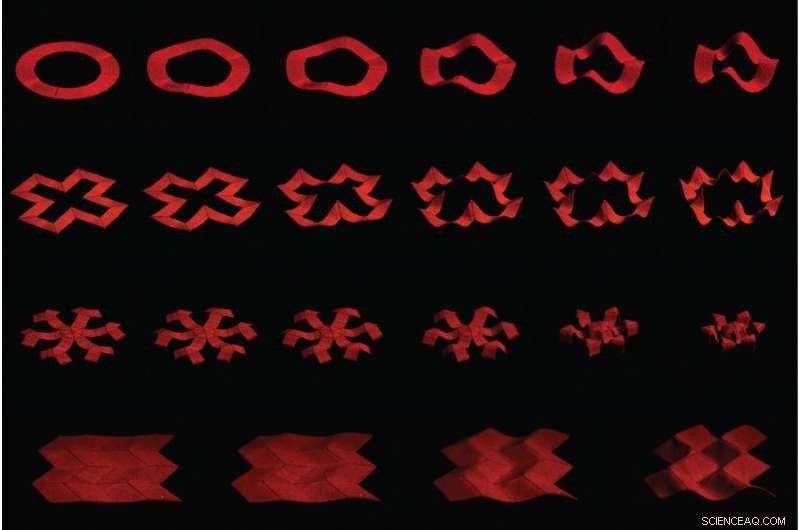
Time-lapse foto til forskellige designs af udviklet magnetisk aktivt materiale. Kredit:MIT Soft Active Materials Lab
Nye 3-D-printede robotstrukturer kan klemme sig ind i trange rum som en revne i væggen i en hule, hoppe over snubletråd eller kravle under et køretøj – alle komplekse hærrelevante funktioner, som er umulige for mennesker at udføre sikkert.
Efterforskere ved Hærens Institut for Soldier Nanoteknologier (ISN), placeret på MIT, har udviklet en 3-D printplatform, der kan muliggøre både modellering og design af komplekse magnetisk aktiverede enheder. Den nye tilgang bruger en 3-D printplatform udstyret med en elektromagnet dyse og en ny type 3-D printbar blæk infunderet med magnetiske partikler. Deres resultater kan føre til nye biomedicinske anvendelser, magnetisk blæk optimeret til at styrke blød robotfunktionalitet, og nye on-demand fleksible materialesystemer til integration i Soldier-systemer.
Bløde robotegenskaber og fremstilling på det tidspunkt, hvor der er behov, er blandt hærens topprioriteter for forskning.
Denne forskning styres gennem U.S. Army Research Laboratory's Army Research Office af Dr. Aura Gimm.
"Denne forskning gav ny indsigt i måder at forårsage hurtige ændringer i 3-dimensionelle former af dele såsom robottens lemmer. MIT-gruppen demonstrerede denne succes ved at bruge auxetic metamaterialer - syntetiske kompositmaterialer, der har en usædvanlig indre struktur og den usædvanlige egenskab, som når de eksponeres til ekstern magnetisk aktivering, de krympede i både længde- og tværretninger. Dette er forskelligt fra typiske auxetiske materialer, der kræver direkte mekanisk kontakt, og når de komprimeres, gennemgår de sammentrækning i retningerne vinkelret på den påførte kraft (dette kaldes det negative Poissons forhold). Tværtimod, almindelige materialer udvider sig i retningerne ortogonalt i forhold til trykbelastning. I et eksempel fra denne undersøgelse, gennem magnetisk fjernbetjening, de fik en metamaterialestruktur til at hoppe fremad 120 mm inden for 0,7 s, hvilket er meget hurtigt for den nuværende state of the art. Dette spring skyldtes en hurtig frigivelse af elastisk og magnetisk potentiel energi lagret i den struktur. Sådanne komplekse form-morphing strukturer kunne have et stort potentiale for hæren, fordi de kan hjælpe med at skabe bløde robotter - robotter med bøjelige lemmer, der ligner naturlige organismer. Sammenlignet med den nuværende generation af stive robotter, bløde robotter kunne bevæge sig meget mere behændigt på et komplekst slagmarksterræn, " sagde Army Research Laboratory Dr. Alex Hsieh.
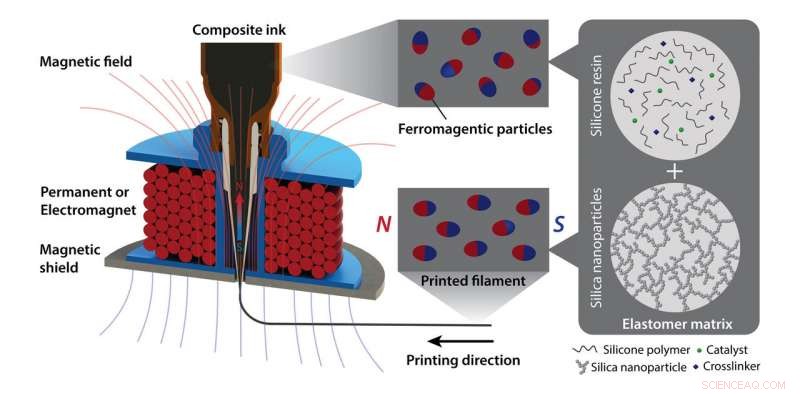
Skemaet af trykprocessen og materialesammensætningen. De ferromagnetiske partikler, der er indlejret i det sammensatte blæk, omorienteres af det påførte magnetfelt før udskrivning. Kredit:US Army
Denne teknologi kan gøre det muligt for den fremtidige hær at fremstille magnetiske 3-D-printede strukturer, der kan kravle, rulle, hop eller grab til støtte for hærens relevante behov. Denne forskningsindsats gør det muligt at kontrollere den magnetiske orientering af nyligt 3-D-printede enheder, så de hurtigt er i stand til at ændre sig til nye indviklede formationer eller bevæge sig rundt, mens forskellige sektioner reagerer på et eksternt magnetfelt. Funktioner demonstreret fra disse komplekse formændringer omfatter rekonfigurerbar blød elektronik, mekanisk metamateriale, der kan hoppe og en blød robot, der kan kravle, rulle, fange genstande i hurtig bevægelse eller levere lægemidler.
Selvom andre grupper har fremstillet magnetisk aktiverede materialer for at udføre simple bevægelser, denne nye tilgang muliggør både modellering og design af magnetisk styrede enhedssektioner til at udføre komplekse hærrelevante bløde robotopgaver.
Fremgangsmåden er baseret på direkte blækskrivning af en elastomerkomposit indeholdende ferromagnetiske mikropartikler og påføring af et magnetisk felt på dispenseringsdysen under udskrivning. Teknikken omorienterer partikler langs det påførte felt for at give mønstret magnetisk polaritet til printede filamenter. Denne metode giver forskerne mulighed for at programmere ferromagnetiske domæner i komplekse 3-D-printede bløde materialer for at muliggøre et sæt tidligere utilgængelige transformationsformer. Aktiveringshastigheden og effekttætheden af de printede bløde materialer med programmerede ferromagnetiske domæner er størrelsesordener større end eksisterende 3-D-printede aktive materialer.
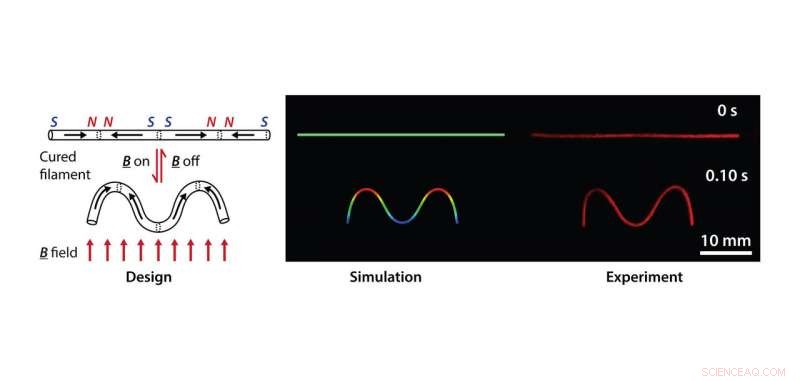
Simulering af finite-element-modellen og eksperimentelle (i rødt) resultater af en enkelt fiber kodet med skiftende magnetiske domæner designet til at danne en 'm'-form. Kredit:MIT
"Vi har udviklet en printplatform og en forudsigelsesmodel, som andre kan bruge. Folk kan designe deres egen struktur og domænemønstre, valider dem med modellen, og udskriv dem for at aktivere forskellige funktioner. Ved at programmere kompleks information af struktur, domæne, og magnetfelt, man kan endda printe intelligente maskiner såsom robotter, " sagde MIT professor Xuanhe Zhao, en efterforsker ved Hærens ISN.
 Varme artikler
Varme artikler
-
 Kan robotter nogensinde have en sand selvfølelse? Forskere gør fremskridtKredit:YAKOBCHUK VIACHESLAV/Shutterstock At have en følelse af selv er kernen i, hvad det vil sige at være menneske. Uden det, vi kunne ikke navigere, interagere, empati eller i sidste ende overle
Kan robotter nogensinde have en sand selvfølelse? Forskere gør fremskridtKredit:YAKOBCHUK VIACHESLAV/Shutterstock At have en følelse af selv er kernen i, hvad det vil sige at være menneske. Uden det, vi kunne ikke navigere, interagere, empati eller i sidste ende overle -
 New York flytter til cap Uber, app-ride køretøjerLejere og deres tilhængere samles til fordel for nu vedtaget lovgivning i New York, der sætter et loft på app-ride-biler New Yorks byråd gav onsdag et slag mod Uber og andre biludlejningsfirmaer,
New York flytter til cap Uber, app-ride køretøjerLejere og deres tilhængere samles til fordel for nu vedtaget lovgivning i New York, der sætter et loft på app-ride-biler New Yorks byråd gav onsdag et slag mod Uber og andre biludlejningsfirmaer, -
 Beijing Auto Show fremhæver e-biler designet til KinaNissan embedsmænd poserer til fotos med den nyligt afslørede Sylphy Zero Emission under starten af Auto China 2018 i Beijing, Kina, Onsdag, 25. april, 2018. Volkswagen og Nissan har afsløret elbiler
Beijing Auto Show fremhæver e-biler designet til KinaNissan embedsmænd poserer til fotos med den nyligt afslørede Sylphy Zero Emission under starten af Auto China 2018 i Beijing, Kina, Onsdag, 25. april, 2018. Volkswagen og Nissan har afsløret elbiler -
 Japan opgraderer regnvejrsprognoser inden Tokyo 2020Japan er tilbøjeligt til ekstreme regnskyl Med et øje på OL i Tokyo 2020, Japanske forskere er ved at udvikle et nyt system til nøjagtigt at forudsige voldsomme regnskyl - kendt i Japan som gueril
Japan opgraderer regnvejrsprognoser inden Tokyo 2020Japan er tilbøjeligt til ekstreme regnskyl Med et øje på OL i Tokyo 2020, Japanske forskere er ved at udvikle et nyt system til nøjagtigt at forudsige voldsomme regnskyl - kendt i Japan som gueril
- Video:European Robotic Arm klar til rummet
- At finde liv hinsides Jorden, tage blinkene af, siger U fra Ts Barbara Sherwood Lollar
- Forskere afslører hemmeligheder ved at designe hjernelignende enheder
- Fiskerivirksomhedens formål
- Ingredienser i sammenføjning Sand
- Hvordan fungerer centrifugal switches?