


En ny korthåndteringsproces til visuel lokalisering i udendørsmiljøer
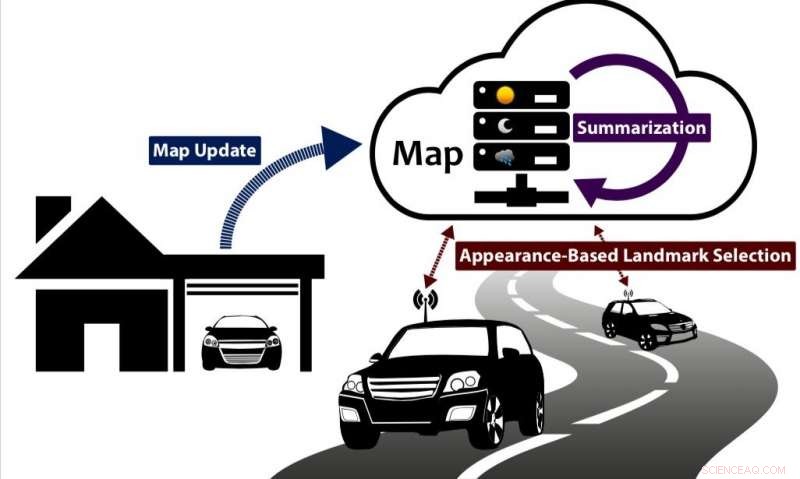
En skematisk oversigt over vores "komplette" visuelle lokaliserings- og kortlægningssystem. Kredit:Bürki et al.
Forskere ved ETH Zürichs Autonomous Systems Lab har for nylig udviklet en korthåndteringsproces for visuelle lokaliseringssystemer, specielt designet til drift i udendørs miljøer, der involverer flere køretøjer. Deres studie, præsenteret på dette års Intelligent Vehicles Symposium (IV) og tilgængelig på arXiv, løser hovedudfordringen med at inkorporere store mængder visuelle lokaliseringsdata i et livslangt visuelt kort, for konsekvent at give effektiv lokalisering under alle udseendeforhold.
"Selvlokalisering er afgørende for enhver form for mobil robot, herunder selvkørende køretøjer, " Mathias Bürki, en af de forskere, der har udført undersøgelsen, fortalte Tech Xplore. "Mens de fleste autonome forskningskøretøjer er udstyret med 3D LiDAR-sensorer, disse er stadig dyre, og deres egnethed til fremtidig masseproduktion er derfor tvivlsom. På den anden side, kamerasensorer er meget billige, og har allerede fundet vej til de nuværende bilflåder (f.eks. til parkeringsassistentsystemer). Derfor, vi har undersøgt potentialet ved at bruge kameraer som en hovedsensor til præcis lokalisering af autonome køretøjer."
En af de primære udfordringer, man støder på, når man udvikler visuelle lokaliseringssystemer til udendørsmiljøer, er at sikre, at disse systemer klarer udseendesændringer godt. Disse omfatter både ændringer, der sker på kort sigt (f.eks. belysning, skygger, osv.) og langsigtede (f.eks. sæsonbestemte ændringer, løv, etc.).
Tidligere forskning viste, at kort, der er skabt til visuel lokalisering, teoretisk set kunne tilpasses til at fungere under forskellige udendørs udseendeforhold. Ikke desto mindre, at tilpasse disse kort kan være meget dyrt, kræver betydelige ressourcer brugt på serverne til at vedligeholde kortene og på selve de selvkørende køretøjer. Selvom der er en række løsninger, der kan hjælpe med at reducere omkostningerne og løse kompleksiteten af dette problem, indtil nu, disse er kun blevet undersøgt isoleret.
"Målet med vores seneste forskning var at kombinere forskellige komponenter og tilgange, der forbedrer skalerbarheden, såsom offline kort opsummering, og online-udseendebaseret skelsættende valg, for at opbygge et fuldstændigt skalerbart og ressourceeffektivt lokaliserings- og kortlægningssystem, " Bürki forklarer. "Vi ønskede også at undersøge i detaljer, hvor godt dette system fungerer i den virkelige verden, langsigtede forhold, hvor lang tid det tager for de visuelle kort at konvergere til en stabil tilstand, hvor godt de forskellige komponenter, der beskæftiger sig med skalerbarhed, arbejder sammen, og om den ene forstyrrer den anden på en uønsket måde."
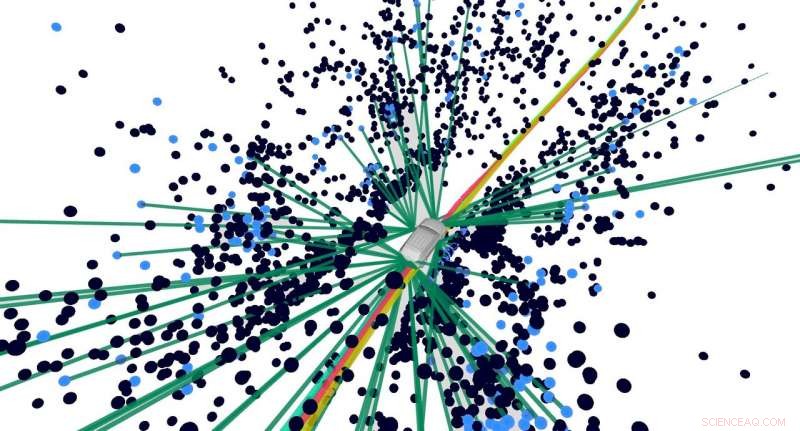
Et skærmbillede fra forskernes visuelle lokaliseringssystem. De mørke og lyseblå kugler angiver 3D-positionen af de visuelle vartegn, der bruges til lokalisering. Den lyseblå indikerer dem, der bliver valgt ved udseendebaseret vartegn, mens de mørke er dem, der kasseres. De grønlige linjer angiver match mellem de levende kamerabilleder i bilen (forfra-, venstre-, bag- og højrekamera), og 3D-vartegnene på kortet. Gennem disse kampe, placeringen (position, retning) af bilen udledes. De tykke farvede linjer illustrerer de baner, hvor bilen kørte under optagelsen af de datasæt, der blev brugt til at bygge multisessionskortet. Kredit:Bürki et al.
Korthåndteringsprocessen udviklet af Bürki og hans kolleger fungerer ved at tilføje nye datasæt til kortet over tid, løbende opdatere det for bedre at kunne klare nye udseendeforhold. Hver gang et nyt datasæt tilføjes til kortet, et efterfølgende kortopsummeringstrin sikrer, at dets størrelse ikke overstiger en vis grænse.
"Hvis det nye datasæt er blevet optaget under udseendeforhold, der allerede er godt dækket af kortet, datasættet er ikke føjet til kortet, men statistikker om skelsættende observationer er forbedret, hvilket til gengæld gør udseendebaseret skelsættende udvælgelse i fremtidige udflugter mere effektivt, " forklarer Bürki.
Forskerne testede den nye korthåndteringsproces i den virkelige verden under udfordrende udendørsforhold. Resultaterne af deres evalueringer var meget lovende, tyder på, at deres lette kortstyringsmekanisme kunne hjælpe med at udvikle visuelle lokaliseringssystemer til autonome køretøjer, der fungerer godt under forskellige udseendeforhold, samtidig med at de præsterer bedre ved valg af vartegn.
"Vores mest meningsfulde konstatering var, at det faktisk er muligt og praktisk gennemførligt at bygge et sådant visuelt lokaliserings- og kortlægningssystem, som a) er, og forbliver effektiv, b) er, og forbliver skalerbar, og c) leverer nøjagtig lokalisering i udendørs miljøer på lang sigt, " sagde Bürki. "En anden konstatering var, at online-udseendebaseret skelsættende udvælgelse og offline kortopsummering fungerer godt sammen og supplerer hinanden."
I fremtiden, mest højtydende autonome køretøjer vil højst sandsynligt være udstyret med 3D LiDAR-sensorer, da disse i øjeblikket forekommer væsentlige for at garantere sikkerheden og sikre, at køretøjet effektivt opfatter forhindringer i sine omgivelser, herunder fodgængere. For nylig, prisen på disse sensorer er faldet betydeligt, hvilket også kunne lette deres udbredte adoption i de kommende år.
"Vi vil nu fokusere vores forskning mere mod spørgsmålet om, hvordan LiDAR-sensorer kan bruges til at understøtte visuel lokalisering, " sagde Bürki. "Især under dårlige lysforhold, kameraer når uundgåeligt deres grænser, mens LiDAR'er også er velegnede til mørke forhold."
© 2018 Tech Xplore
Sidste artikelFalske nyhedsdetektoralgoritme fungerer bedre end et menneske
Næste artikelEdmunds afrunder dagens bedste hybrider
 Varme artikler
Varme artikler
-
 Brintmobilitet fra ren energi tager fart i EuropaKredit:Mona Makela, Shutterstock Selvom masseudrulningen af brændselscelle-elbiler stadig er år væk, indsatsen for at gøre brintdrevne biler mainstream er intensiveret i de senere år. Med Europa
Brintmobilitet fra ren energi tager fart i EuropaKredit:Mona Makela, Shutterstock Selvom masseudrulningen af brændselscelle-elbiler stadig er år væk, indsatsen for at gøre brintdrevne biler mainstream er intensiveret i de senere år. Med Europa -
 Verdens største telefonshow åbner under catalansk løsrivelsesskyPro-uafhængighedsdemonstranter samledes i Barcelona for at protestere mod et besøg af Spaniens konge til den ceremoni, der indviede Mobile World Congress Verdens største telefonshow åbnede i Barce
Verdens største telefonshow åbner under catalansk løsrivelsesskyPro-uafhængighedsdemonstranter samledes i Barcelona for at protestere mod et besøg af Spaniens konge til den ceremoni, der indviede Mobile World Congress Verdens største telefonshow åbnede i Barce -
 Oppos kamerasystem med 10x optisk zoom vinder opmærksomhed ved Barcelona-arrangementetKredit:Oppo Skift mellem tre kameraer. Kom så tæt på eller gå så bredt, som du vil. Få dine professionelle komplimenter uden at skulle slæbe tilbehør, da din tryllestav var den slanke enhed lige i
Oppos kamerasystem med 10x optisk zoom vinder opmærksomhed ved Barcelona-arrangementetKredit:Oppo Skift mellem tre kameraer. Kom så tæt på eller gå så bredt, som du vil. Få dine professionelle komplimenter uden at skulle slæbe tilbehør, da din tryllestav var den slanke enhed lige i -
 Twitter bringer valgmærker for 2020 amerikanske kandidater tilbageDenne 9. juli, 2019, filbillede viser et skilt uden for Twitter-kontorbygningen i San Francisco. Twitter bringer særlige mærker tilbage for at hjælpe brugere med at identificere konti og tweets fra am
Twitter bringer valgmærker for 2020 amerikanske kandidater tilbageDenne 9. juli, 2019, filbillede viser et skilt uden for Twitter-kontorbygningen i San Francisco. Twitter bringer særlige mærker tilbage for at hjælpe brugere med at identificere konti og tweets fra am
- Hvordan digitale teknologier kan hjælpe Afrikas småbønder
- I mediernes dækning af klimaændringer, hvor er fakta?
- Hvad er miljøbelastningen fra minedrift og boring?
- Kemiske ingeniører udvikler ny teori til at bygge forbedrede nanomaterialer
- Forværrede forhold i fængslerne under COVID-19 marginaliserer yderligere kriminaliserede kvinder
- Antennereaktorkatalysatorer tilbyder det bedste fra begge verdener