


UC Berkeley-holdet giver hoppende robot højere mål end hoppende-hoppende
"Præcisions hoppegrænser fra flyvefasekontrol i Salto-1P" er den akademisk klingende titel på et papir, der ikke desto mindre skulle glæde dem, der er interesseret i robotbevægelse.
Justin Yim og Ronald Frygt, Institut for Elektroteknik og Datalogi, University of California, Berkeley, er papirets forfattere. Deres arbejde blev præsenteret tidligere på måneden på IROS 2018 i Madrid.
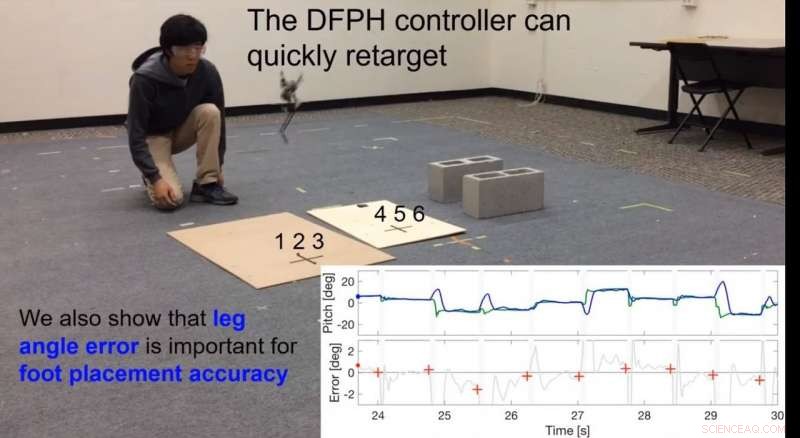
Dette er en monopedal robot, kaldet Salto-1P. Videonoter beskrev yderligere Salto-1P som en lille monopædisk springrobot, der er i stand til kontinuerlig hopping med høj effekt.
Hvorfor kalder de det Salto? James Holloway i Nyt Atlas tilfredse de nysgerrige. Saltatorisk bevægelse på terrænhindringer er svaret, uanset hvad "saltatorisk" betyder. Holloway og Google hjalp også derude.
Saltatoriske midler tilpasset til spring. Saltus er et latinsk ord for spring.
Rent faktisk, at se en enbenet robot hoppe rundt i en non-stop-vanvid, er mærkeligt medrivende. Imidlertid, forskerne ved UC Berkeley havde flere målrettede bevægelser i tankerne. Holdet er fast besluttet på at levere en robot, der kan springe, der får det rigtigt med, hvor det lander næste.
"To små propeller tillader robotten at vride i luften, men al drivkraft kommer fra det enkelte ben, " sagde Hackaday .
Man kan forstå IEEE -spektrum vælger at kalde det en "robot pogo stick" (men det er ikke historien; det handler snarere om, hvad pinden nu kan udrette). Forskerne var ikke interesserede i bare at komme med en hypermaskine, der smed sig om.
TechCrunch skrev om sine muligheder:(1) den kan se en overflade efter et mål, skrev John Biggs, og (2) "flyver i det væsentlige over til det sted, hvor det skal lande ved hjælp af indbyggede propeller."
Hvorfor deres seneste arbejde betyder noget:Det handler om controlleren, som de opgraderede for at forbedre præcisionen ved landing - "en bedrift, der var næsten umulig ved hjælp af det tidligere kontrolsystem, "sagde Biggs.
Evan Ackerman forklarede, at Salto-1Ps hardware er den samme som sidste år:et aktiveret elastisk ben til humle, "en inertial hale, der drejer for at styre tonehøjde, og en halv quadcopter til at kontrollere yaw and roll. "Men i år, det handler om controlleren.
Holdets mål for Salto-1P var en bedre controller til at gøre ting, der kræver præcis fodplacering. Ackerman sagde, at "endnu mere aggressiv adfærd, som at springe mellem vægge, involverer en hel sekvens af spring, der alle skal være præcise, da et enkelt unøjagtigt spring sandsynligvis vil få robotten til at falde og smadre sig selv i stykker. "
I deres papir, forfatterne diskuterede deres dødsbetingede fodplaceringskontrol. Hvad betyder det? Godt, de har at gøre med "en ny kontrolalgoritme, der kan lande Salto-1P's fod på bestemte steder på jorden som at hoppe på trædesten eller spille et-benet humle." De kalder dette "dødsbetinget fodplacering hopping kontrol".
Holloway fortalte Nyt Atlas læsere om holdets tilgang. "Controlleren bruger det, der er kendt i matematik, som en Taylor -serie -tilnærmelse, som kan bruges til at tilnærme svar på komplekse ligninger, herunder de styrende kræfter, der handler på et punkt. "
Slutresultat:en robot konstrueret sådan, at den ikke bare kan hoppe, men hoppe mellem udpegede steder, "som om at hoppe fra trædesten til trædesten eller spille humle." Det kan hoppe på jorden, eller mellem objekter i stigende højde, sagde Holloway.
Deres liste over det næste arbejde på denne springende robot omfatter undersøgelse af virkningerne af ikke-stift eller skrånende terræn på springpræstationer og kontrolstrategi. Også, ifølge Ackerman, "Vi talte med Justin Yim på IROS, der fortalte os, at han arbejder på at øge Salto-1Ps springpræcision endnu mere, samtidig med at den fravænnes af de eksterne lokaliserings- og computersystemer, der holder den begrænset indendørs. "
© 2018 Tech Xplore
 Varme artikler
Varme artikler
-
 Virksomheder trykker på pauseknappen, da coronavirus inficerer økonomienVirksomheder skærer ned eller stopper produktionen Fyringer, omkostningsnedskæringer og skrottede udbytter... virksomheder kæmper for at tilpasse sig, efterhånden som coronakrisen rammer efterspør
Virksomheder trykker på pauseknappen, da coronavirus inficerer økonomienVirksomheder skærer ned eller stopper produktionen Fyringer, omkostningsnedskæringer og skrottede udbytter... virksomheder kæmper for at tilpasse sig, efterhånden som coronakrisen rammer efterspør -
 Kampagner på egen hånd som cybertrusler slår midtvejsI denne 16. maj, 2012, fil foto, Facebook-logoet vises på en iPad i Philadelphia. Efterretningsembedsmænd advarer om, at udenlandske modstandere fortsætter med at føre cyberkrig mod de amerikanske val
Kampagner på egen hånd som cybertrusler slår midtvejsI denne 16. maj, 2012, fil foto, Facebook-logoet vises på en iPad i Philadelphia. Efterretningsembedsmænd advarer om, at udenlandske modstandere fortsætter med at føre cyberkrig mod de amerikanske val -
 Aktiverer internet af fotoniske ting med miniaturesensorerEt team af forskere ved Washington University i St. Louis er de første, der med succes optager miljødata ved hjælp af en trådløs fotonisk sensorresonator med en whispering-gallery-mode (WGM) arkitektu
Aktiverer internet af fotoniske ting med miniaturesensorerEt team af forskere ved Washington University i St. Louis er de første, der med succes optager miljødata ved hjælp af en trådløs fotonisk sensorresonator med en whispering-gallery-mode (WGM) arkitektu -
 Boeing forventer ikke, at Max jet bliver klareret til sommerI denne 16. december, 2019, fil foto en medarbejder kigger op under et Boeing 737 MAX jetfly i Renton, Wash. Boeing forventer ikke, at føderale tilsynsmyndigheder godkender ændringerne af den jordede
Boeing forventer ikke, at Max jet bliver klareret til sommerI denne 16. december, 2019, fil foto en medarbejder kigger op under et Boeing 737 MAX jetfly i Renton, Wash. Boeing forventer ikke, at føderale tilsynsmyndigheder godkender ændringerne af den jordede
- En dyb læringsbaseret metode til synsbaseret taktil sansning
- Hvordan vil havets kulstofkredsløb udvikle sig i fremtiden? Nyt projekt har til formål at finde ud…
- Hvorfor vi har brug for en moderne oprindelseshistorie i dag
- Hvad forårsager gastryk?
- Ride-hylder firma Lyft stiger i Wall Street premiere
- Hvordan fremtidige vulkanudbrud vil påvirke Jordens ozonlag