


Robot DE NIRO:En robotplatform til menneskecentrerede interaktioner
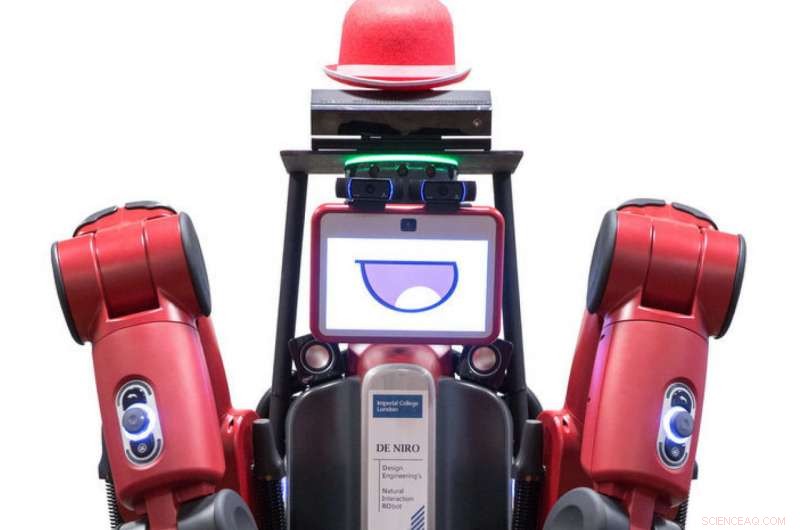
Robot DE NIRO. Kredit:Robot Intelligence Lab, Imperial College London.
I fremtiden, robotter kunne spille en nøglerolle i sundhedsmiljøer, lette livet for ældre og hjælpe udsatte personer. Forskere ved Imperial College London har for nylig skabt Robot DE NIRO, en robotforskningsplatform, der kunne støtte omsorgspersoner, samtidig med at de interagerer direkte med plejemodtageren.
"Målene med vores projekt var overraskende enkle:at bygge noget, der kunne demonstrere social nytte og bidrage til Dr. Kormushevs Robot Intelligence Lab, "Fabian Falck, fortalte en af forskerne, der udviklede Robot DE NIRO TechXplore . "Vi havde en håndfuld store ideer, men i sidste ende, besluttede at lære en robot at spille apport. Vi anså genfinding af objekter for at være utrolig værdifuld og anvendelig i mange situationer, for eksempel at hente medicin til svage patienter, der har svært ved at bevæge sig. Vores projekt udstyrede også DE NIRO med funktioner som navigation, ansigtsgenkendelse og objektmanipulation."
Robotten udviklet af Falck og hans kolleger kan effektivt tackle avancerede og komplekse manipulationsopgaver. DE NIRO interagerer med mennesker og pålideligt, samtidig med at man selvstændigt bevæger sig rundt i dynamisk skiftende miljøer.
"Robot DE NIRO kombinerer Rethink Robotics' Baxter-robot med en mobil platform på hjul, der gør den i stand til at bevæge sig rundt, Falck forklarede. DE NIRO blev forbedret med en række forskellige sensorer såsom en Microsoft Kinect og laserscannere, der gør den i stand til at opfatte omgivelserne."

Robot DE NIRO. Kredit:Robot Intelligence Lab, Imperial College London.
DE NIROs sikkerhedsfunktioner adskiller den fra mange eksisterende robotter, sikre, at dens interaktioner er menneskecentreret, og at robotten reagerer tilstrækkeligt på sine brugere. Da det er designet til brug omkring sårbare eller ældre mennesker, forskerne prioriterede sikkerhed både i robottens hardware og software.
"Allerede i sit hardwaredesign, DE NIRO er bygget i en menneskecentreret, samarbejdsmetode, " sagde Falck. "F.eks. passiv compliance i robottens arme absorberer fysisk påvirkning af en person. Når man udvikler sin software, vi lagde særlig vægt på at undgå kollisioner under manipulation og navigation af robotten, så den fungerer sikkert uanset brugerens handling. Vi tror på, at det vil være et afgørende kendetegn ved fremtidige socialhjælpsrobotter."
Forskningsprojektet udført af Falck og hans kolleger førte til bemærkelsesværdige resultater. En primær bedrift var den vellykkede integration af forskellige state-of-the-art maskinlæring (ML) og kontrolalgoritmer i en enkelt robot.

Robot DE NIRO spiller ishockey. Kredit:Robot Intelligence Lab, Imperial College London.
"Vi fokuserede på det holistiske design i stedet for at perfektionere en enkelt opgave, med håb om, at vi kan bruge denne platform til at udforske yderligere use cases i fremtiden, " sagde Falck. "Vores projekt demonstrerede også den betydelige værdi af open source-software. Robottens software var jordet på ROS, open source robotoperativsystem, der kommer med utallige fordele, såsom at styre en række operationer samtidigt."
Den endelige version af Robot DE NIRO inkorporerer ROS og en række andre open source-projekter. Ved at bruge åben kildekode, forskerne var i stand til at bygge deres robot på relativt kort tid, drage fuld fordel af ressourcer, der er let tilgængelige online.
"Da det robotiserede open source-fællesskab stadig er ungt, vi blev ofte efterladt frustrerede over manglen på online vejledning, Falck forklarede. vi producerede og udgav detaljeret dokumentation, der skulle hjælpe andre, der står over for lignende problemer eller ønsker at udvide vores arbejde."

Robot DE NIRO ved Imperial Fest 2018. Kredit:Robot Intelligence Lab, Imperial College London.
I foreløbige test og eksperimenter, Robot DE NIRO klarede sig bemærkelsesværdigt godt, viser store løfter som et værktøj til at hjælpe pårørende og plejemodtagere i sundhedsvæsenet. På trods af sine snesevis af sensorer, imidlertid, DE NIRO er stadig meget begrænset i sin bevidsthed om verden. Forskerne skal derfor udvide deres forskning yderligere, før robotten er klar til at komme ind i rigtige plejemiljøer.
"Vi sigter mod at implementere yderligere sikkerhedsforbedringer ved at øge DE NIROs bevidsthed, såsom en 360-graders kamerarig eller anvendelse af en 3D LIDAR, Falck sagde. vi vil forbedre de point-cloud-baserede manipulationsteknikker for at tillade en mere generisk gribeevne og forbedre de i øjeblikket ret rudimentære autonome muligheder for navigation til at fungere problemfrit i ukendte miljøer."
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Undersøgelse kaster lys over plage af falske nyheder i AfrikaKredit:CC0 Public Domain Bekymringer om falske nyheder har domineret diskussioner om forholdet mellem medier og politik i den udviklede verden i de senere år. Den ekstraordinære opmærksomhed, der
Undersøgelse kaster lys over plage af falske nyheder i AfrikaKredit:CC0 Public Domain Bekymringer om falske nyheder har domineret diskussioner om forholdet mellem medier og politik i den udviklede verden i de senere år. Den ekstraordinære opmærksomhed, der -
 2K genforenes med NFL for at lave fodboldvideospilKredit:CC0 Public Domain Videospilsudgiveren 2K er tilbage til at arbejde med NFL, selvom det kommer med en betydelig fangst. På tirsdag, 2K annoncerede et partnerskab med National Football Leagu
2K genforenes med NFL for at lave fodboldvideospilKredit:CC0 Public Domain Videospilsudgiveren 2K er tilbage til at arbejde med NFL, selvom det kommer med en betydelig fangst. På tirsdag, 2K annoncerede et partnerskab med National Football Leagu -
 E-handelsgiganten Alibaba hæver 11 milliarder dollars i aktienoteringI denne 27. maj, 2016, fil foto, en kvinde cykler forbi virksomhedens logo uden for Alibaba -koncernens hovedkvarter i Hangzhou, i det østlige Kinas Zhejiang -provins. Den kinesiske e-handelsgigant Al
E-handelsgiganten Alibaba hæver 11 milliarder dollars i aktienoteringI denne 27. maj, 2016, fil foto, en kvinde cykler forbi virksomhedens logo uden for Alibaba -koncernens hovedkvarter i Hangzhou, i det østlige Kinas Zhejiang -provins. Den kinesiske e-handelsgigant Al -
 CES:Buzzy NEON-startup bygger kunstige mennesker, der ligner bankfolk, modemodellerKredit:Edward C. Baig USAT At finde ud af, hvem og hvad der er ægte eller falsk i dag, bliver en sværere udfordring i denne AI-drevne tidsalder. På CES, en travl startup med en Samsung stamtavle,
CES:Buzzy NEON-startup bygger kunstige mennesker, der ligner bankfolk, modemodellerKredit:Edward C. Baig USAT At finde ud af, hvem og hvad der er ægte eller falsk i dag, bliver en sværere udfordring i denne AI-drevne tidsalder. På CES, en travl startup med en Samsung stamtavle,
- Tyske startups lancerer miniraketudfordring til SpaceX og co.
- Hvordan tilpasser dyrene sig til den tempererede regnskov?
- Skjulte figurer ikke mere:Lego ærer kvinder fra NASA
- Fastholdelse af direktører letter ikke nødvendigvis virksomhedens præstationer efter overtagelsen…
- Ultratyndt elektronisk barrierelag til at kontrollere grænsefladeluminescens
- Forstå driverne bag et skift til bæredygtige kostvaner