


En ny rekonfigurationsstrategi for modulære robotter inspireret af origami-foldning
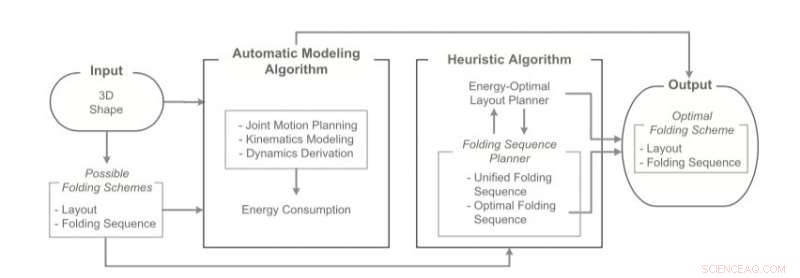
Oversigt over energioptimal rekonfigurationsplanlægning for modulære robotter ved hjælp af to tilgange, en automatisk modelleringsalgoritme og en heuristisk algoritme. Kredit:Yao et al.
Forskere ved Reconfigurable Robotics Lab (RRL) af École Polytechnique Fédèrale de Lausanne (EPFL) har for nylig udviklet en ny tilgang til rekonfigurering af modulære robotter, der er inspireret af kunsten at origami. Denne metode, skitseret i et papir udgivet i Sage's International Journal of Robotics Research , eliminerer forbindelsesændringer under et systems transformation.
Modulære rekonfigurerbare robotter er alsidige systemer, der kan transformere deres form til at udføre forskellige opgaver i en række forskellige miljøer. Dette kan være særligt nyttigt i missionsbaserede indstillinger, såsom plads, anerkendelse, prøveudtagning, eller eftersøgnings- og redningsaktioner. I disse tilfælde, konventionelle robotter med fast morfologi kan have svært ved at tilpasse sig komplekse og usikre miljøer, mens modulære robotsystemer autonomt kan omkonfigurere og tilpasse sig nye omstændigheder.
Rekonfigurerbarheden af modulære systemer opnås ved at ændre morfologien af deres overordnede struktur, samt ved at tilslutte og frakoble deres moduler. På trods af de bemærkelsesværdige fordele ved at bruge disse systemer, det store antal individuelle komponenter og frihedsgrader (DoF'er) involveret gør ændring af deres konfiguration meget udfordrende.
For at planlægge og optimere denne proces, tidligere undersøgelser har foreslået en række forskellige tilgange, som kan opdeles i to hovedkategorier. Den første kategori indebærer målkonfiguration ved at opdele systemets modulære arkitektur i forskellige sæt moduler, som kan forenkle rekonfigurationsprocessen. Disse tilgange kan lette designet af den endelige konfiguration til specifikke opgaver, alligevel undlader de at løse den dynamiske rekonfigurationsproces.
En anden tilgang til optimering af rekonfiguration er at minimere antallet af forbindelsesændringer, når systemet omdannes til den ønskede form. Selvom disse rekonfigurationsplanlæggere har til formål at reducere antallet af forbindelsesændringer, de kræver stadig en eller anden form for afbrydelse og forbindelse mellem moduler i processen. Disse tilslutningsændringer er tidskrævende, kan forårsage komplikationer i den overordnede transformation og kan resultere i fejljustering, fører til systemets mekaniske fejl.
Håndtering af begrænsningerne ved eksisterende tilgange, forskerteamet på RRL introducerede en ny strategi til planlægning af rekonfiguration af modulære robotiksystemer, som trækker fra processen med at folde origami. Origami er den traditionelle japanske kunst at folde flade ark papir til en række 3D-objekter eller -former.
"Vores metode består af en energioptimal rekonfigurationsplanlægger, der genererer et indledende 2-D samlingsmønster og en aktiveringssekvens af de modulære enheder, begge resulterer i et minimalt energiforbrug, " skrev forskerne i deres papir.
Den algoritmiske ramme, som forskerne har udtænkt, omfatter to hovedkomponenter:en automatisk modelleringsalgoritme og en heuristisk algoritme. Den automatiske modelleringsalgoritme genererer den kinematiske model og dynamiske udledning af robotaggregater, beregning af drejningsmomentforbruget af præ-foldningsmønstre for foruddefinerede foldesekvenser og brug af bevægelsesplanlægning til at overveje tykkelsen af strukturen. Den heuristiske algoritme, på den anden side, indeholder en optimal 2-D layoutplanlægger efterfulgt af to foldende sekvensplanlæggere:en samlet aktiveringsplanlægger til forskellige layout og en optimal planlægger inden for et specifikt layout.
Den nye tilgang, der er udtænkt på RRL, løser effektivt det NP-komplette problem med energioptimal rekonfigurationsplanlægning i modulære robotter, generering af energioptimale rekonfigurationsskemaer for den indledende samling og foldningssekvens af systemets moduler. Forskerne evaluerede deres strategi ved hjælp af simuleringer på Mori, en modulær robotplatform, og opnåede meget lovende resultater.
"Vi demonstrerer effektiviteten af vores metode ved at anvende algoritmerne til Mori, en modulær origami robot, i simulering, " skrev forskerne i deres papir. "Vores resultater viser, at den heuristiske algoritme giver rekonfigurationsskemaer med høj kvalitet, sammenlignet med den automatiske modelleringsalgoritme, sparer samtidig en betydelig mængde beregningstid og kræfter."
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Tesla skifter gear med planer om at udstede flere aktierTesla søger at rejse omkring 2 milliarder dollar ved at udstede nye aktier, efter en stigning i værdien af elbilproducenten i de seneste måneder Tesla skiftede gear torsdag og sagde, at det vill
Tesla skifter gear med planer om at udstede flere aktierTesla søger at rejse omkring 2 milliarder dollar ved at udstede nye aktier, efter en stigning i værdien af elbilproducenten i de seneste måneder Tesla skiftede gear torsdag og sagde, at det vill -
 Ny tilgang til perovskit-solceller – billigere produktion og høj effektivitetMolekylet, syntetiseret af KTU-kemikerne, samler sig selv i et enkeltlag, som kan dække en række forskellige overflader og kan fungere som et hultransporterende materiale i en perovskit-solcelle. Kred
Ny tilgang til perovskit-solceller – billigere produktion og høj effektivitetMolekylet, syntetiseret af KTU-kemikerne, samler sig selv i et enkeltlag, som kan dække en række forskellige overflader og kan fungere som et hultransporterende materiale i en perovskit-solcelle. Kred -
 Mitsubishi Motors:Skandaleramt tredje hjul i Ghosns allianceMitsubishi Motors er blevet reddet fra skandalebetinget konkurs Mitsubishi Motors er nogle gange den glemte partner i den tre-vejs alliance med Nissan og Renault, der dominerer den globale bilindu
Mitsubishi Motors:Skandaleramt tredje hjul i Ghosns allianceMitsubishi Motors er blevet reddet fra skandalebetinget konkurs Mitsubishi Motors er nogle gange den glemte partner i den tre-vejs alliance med Nissan og Renault, der dominerer den globale bilindu -
 Nyt digitalkamera-baseret system kan se rundt om hjørnerDen penumbra eller delvise skygge, der ses på den fjerneste væg - skabt af en lys scene vist på en LCD-skærm (venstre) og en stol (i midten) - giver tilstrækkelig lysinformation til, at et computerpro
Nyt digitalkamera-baseret system kan se rundt om hjørnerDen penumbra eller delvise skygge, der ses på den fjerneste væg - skabt af en lys scene vist på en LCD-skærm (venstre) og en stol (i midten) - giver tilstrækkelig lysinformation til, at et computerpro
- Forskere skal udforske smeltevand i Grønland Koldkrigslejr
- Swarm afslører, hvorfor GPS -satellitter mister overblikket over ækvator mellem Afrika og Sydameri…
- Luftforurening koster $ 2,9 billioner om året:NGO
- NASA-lydende raket lanceres med succes ind i alaskan nat
- Inflationens fordele og ulemper
- Kan kulaske være en levedygtig kilde til sjældne jordarters metaller?