


Ny hydraulisk aktuator vil gøre robotter hårdere

Denne figur viser en syvakset hydraulisk robotarm, der brækker betonplader, hver 30 mm tyk. Dette er en prototype til sammenligning med en firbenet robot, der også udvikles i dette projekt af Waseda University, Meiji Universitet, og andre, produceret i nogenlunde samme størrelse. Den består af syv af de nye hydraulikmotorer. Kredit:Suzumori Laboratory
Forskere ved Tokyo Institute of Technology (Tokyo Tech) har udviklet en hydraulisk aktuator, der gør det muligt for hårde robotter at operere på katastrofesteder og andre barske miljøer. Tokyo Tech Venture H-MUSCLE Corporation blev etableret for at forfølge ansøgninger om aktuatoren, og forsendelse af produktprøver begynder i februar 2019.
Størstedelen af nutidens robotter er drevet af elektriske motorer, men hydrauliske aktuatorer, med deres høje output og slagfasthed, ville være velegnet til robotter, der opererer i barske miljøer. Imidlertid, typiske hydrauliske aktuatorer er udviklet til industrimaskiner, som elektriske skovle, og er for store og tunge til at blive brugt i robotter; de kan heller ikke give jævn bevægelse eller kraftkontrol.
Tokyo Tech School of Engineering professor Koichi Suzumori og kolleger udviklede en hydraulisk aktuator til at løse disse problemer. Aktuatoren tilbyder stærkt øget kraft og stødmodstand sammenlignet med konventionelle elektriske motorer. Det giver også en mindre størrelse, højere output (kraft-til-masse-forhold), og mere jævn kontrol sammenlignet med konventionelle hydrauliske aktuatorer. Giver høj effekt, holdbarhed, og fremragende kontrol, aktuatoren vil tillade robotter at arbejde i de barskeste miljøer og udføre hårdt arbejde med en blid berøring.
Denne hydrauliske aktuator er resultatet af Tough Robotics Challenge, arrangeret af Impulsing Paradigm Change through Disruptive Technologies Program (ImPACT) fra det japanske kabinets kontor. Tokyo Tech; JPN Co., Ltd.; Bridgestone Corporation; og KYB Corporation; sammen med andre universiteter og virksomheder beskæftiget med hydraulisk udstyr, har deltaget i udviklingen af den hydrauliske aktuator til hårde robotter siden 2014. For at fremme adoptionen af teknologien, H-MUSCLE vil sende prøver af sine hydrauliske cylindre og hydrauliske motorer til indenlandske producenter, udvide sit udvalg af aktuatorer til fremtidigt salg, og udforske yderligere applikationer.
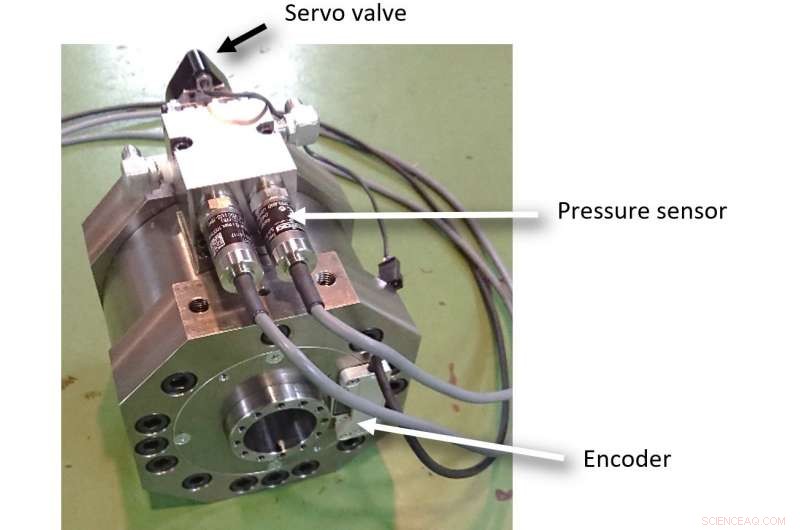
En lille, letvægts, jævnt glidende motor. Kredit:Suzumori laboratorium
Baggrund
Impact Tough Robotics Challenge (2014-2018, Programleder:Satoshi Tadokoro, Professor, Tohoku University) har udført forskning med det formål at skabe robotter til hård drift, selv på ekstreme katastrofesteder. Som en del af dette projekt, hydrauliske aktuatorer specifikt til robotter og deres robotapplikation blev sat som et forskningstema. Koichi Suzumori (robotik, actuator engineering) hos Tokyo Tech var leder af gruppen med deltagere Tokyo Tech; Okayama Universitet; Ritsumeikan Universitet, JPN Co., Ltd.; Bridgestone Corporation; og KYB Corporation. I samarbejde med mange andre virksomheder med højt specialiserede teknologier, det lykkedes dem at udvikle en aktuator til hydrauliske robotter, som er lille, letvægts, høj output, og glidende, noget, der ikke er tilgængeligt i eksisterende produkter.
Fortjenester af små, letvægts, glatglidende aktuatorer
Den nye hydrauliske aktuator tilbyder følgende fremskridt i forhold til eksisterende hydrauliske aktuatorer.
- Lille størrelse. Japanske industristandarder (JIS) specificerer kun cylindre med en indvendig diameter på 35 mm eller mere. Imidlertid, robotter kræver mindre cylindre. H-MUSCLE har udviklet cylindre med en indvendig diameter på 20 til 30 mm i samarbejde med JPN Co., Ltd.
- Højt kraft-til-masse-forhold. "Kraft" er den genererede aksiale kraft, og "masse" er vægten af selve cylinderen. Robotter kræver et højere kraft-til-masse-forhold end almindelige stationære industrimaskiner. Selvom figuren kun er et repræsentativt udsnit, H-MUSCLE cylindre kan levere en overvældende højere værdi. Dette blev muliggjort af (1) et drivtryk på 35 MPa, (2) titanium og magnesiumlegeringer, og (3) opfindsomt design.
- Glat glidning. Denne cylinder fungerer ved bemærkelsesværdigt lavere tryk end normale JIS-cylindre. Konventionelle hydrauliske cylindre og motorer har stive tætninger mellem stemplet og cylinderen for at forsegle væsken, og den store friktion heraf forhindrede jævne bevægelser og magtkontrol. Med lavfriktionstætninger og opfindsomt design, denne forskning indså lav friktion, omkring en tiendedel af konventionelle produkter. Dette løser problemerne med præcis bevægelse og kraftkontrol, som findes med konventionelle hydrauliske robotter.
ImPACT har bygget flere hårde robotprototyper for at teste potentielle anvendelser for den hydrauliske aktuator.
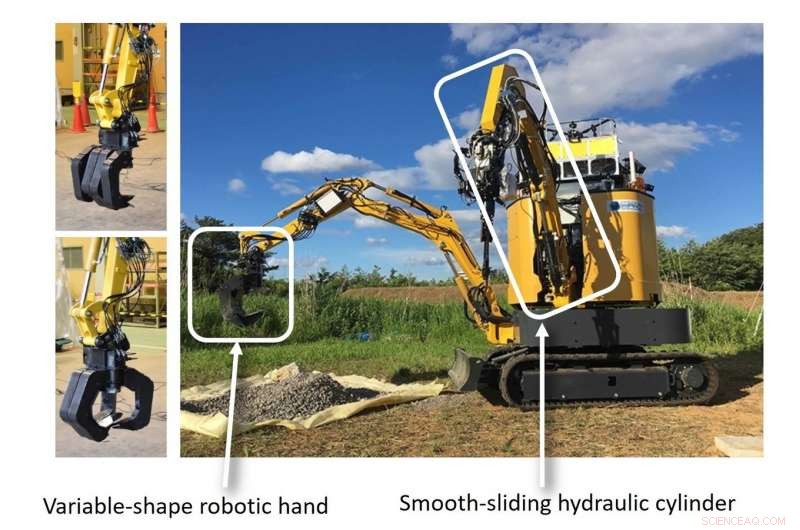
En byggerobot, der udvikles af Komatsu, Osaka Universitet, og andre. Den mindste af de to arme drives af glatglidende cylindre udviklet i dette program, bidrager til dens evne til at udføre fine manipulationer. Enden af den anden arm er udstyret med en hydraulisk hånd ved hjælp af den nye hydrauliske aktuator. Med fire fingre, den kan bruges i skovltilstand eller håndtilstand efter behov. I håndtilstand, den kan gribe genstande af forskellig form og kontrollere grebets kraft. Kredit:Komatsu, Osaka Universitet, Tokyo Institute of Technology
 Varme artikler
Varme artikler
-
 Annoncerer en kvartet af trådløse opladningsprodukter til hjemmet, kontor, bilKredit:mophie Nye trådløse opladere har fanget opmærksomheden på websteder, der ser mobile teknologier. JC Torres ind SlashGear var blot en af de mange forfattere, der tjekkede Mophies newbie-
Annoncerer en kvartet af trådløse opladningsprodukter til hjemmet, kontor, bilKredit:mophie Nye trådløse opladere har fanget opmærksomheden på websteder, der ser mobile teknologier. JC Torres ind SlashGear var blot en af de mange forfattere, der tjekkede Mophies newbie- -
 Uber hopper ind i elektriske scootere i EuropaUber har bevæget sig ind på markedet for leje af elektriske sparkescootere i Europa med Jump-datterselskabets lanceringstjeneste i Madrid Den globale ride-hiing-gigant Uber lancerede tirsdag i Mad
Uber hopper ind i elektriske scootere i EuropaUber har bevæget sig ind på markedet for leje af elektriske sparkescootere i Europa med Jump-datterselskabets lanceringstjeneste i Madrid Den globale ride-hiing-gigant Uber lancerede tirsdag i Mad -
 Goldman Sachs CEO siger ingen kønsforstyrrelser i Apple CardGoldman Sachs administrerende direktør David Solomon har afvist beskyldninger om kønsdiskrimination mod et AI -program, der bruges til at fastsætte kreditgrænser for Apple Cards Goldman Sachs admi
Goldman Sachs CEO siger ingen kønsforstyrrelser i Apple CardGoldman Sachs administrerende direktør David Solomon har afvist beskyldninger om kønsdiskrimination mod et AI -program, der bruges til at fastsætte kreditgrænser for Apple Cards Goldman Sachs admi -
 Ny enhed muliggør batterifri computerinput ved spidsen af din fingerTip-Tap-teknologi fastgjort til en persons hånd. Kredit:University of Waterloo Dataloger ved University of Waterloo har skabt en enhed til bærbar computerinput, der er egnet til mange situationer,
Ny enhed muliggør batterifri computerinput ved spidsen af din fingerTip-Tap-teknologi fastgjort til en persons hånd. Kredit:University of Waterloo Dataloger ved University of Waterloo har skabt en enhed til bærbar computerinput, der er egnet til mange situationer,
- Civilingeniører udtænker en omkostningsbesparende løsning til byer
- Hvordan er bakterier og planteceller ens?
- Hvad hvis Jorden havde to måner?
- Hvad afholder kvinder fra at rapportere seksuel chikane?
- Ny ichthyosaur art, langt væk, fundet i et lagerrum
- Rumteleskop for at teste Einsteins teorier om tyngdekraften