


En decentraliseret banegenereringsalgoritme til multirobotsystemer
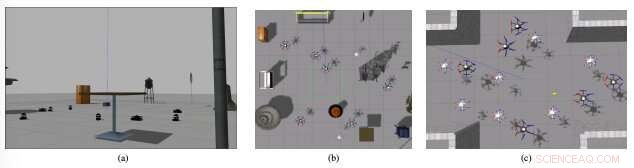
Snapshots, mens robotterne navigerer på tværs af forskellige ukendte miljøer ved hjælp af den algoritme, der er foreslået i dette arbejde. Kredit:Govind Aadithya R et al.
Forskere ved SRM Institute of Science and Technology i Indien har for nylig udviklet en decentraliseret banegenereringsalgoritme til multi-agent-systemer. Deres algoritme, præsenteret i et papir, der er forududgivet på arXiv, kan generere kollisionsfrie baner for robotter, når de er forsynet med en starttilstand og ønsket slutposition.
"Govind og hans team henvendte sig ambitiøst til mig for at søge mit forslag til deres bachelorprojekt, "Sivanathan K, seniorforsker, der overvågede undersøgelsen, fortalte TechXplore. "Ved at kende deres matematiske evner, Jeg følte, at de skulle tildeles et udfordrende problem, som fremtiden venter på at løse. Mens verden bevæger sig mod autonome biler, Jeg foreslog at udvikle en decentraliseret algoritme til autonome køretøjer til at navigere i vejkryds. Vi følte, at algoritmens ydeevne ikke var op til standarderne, så vi udvidede arbejdet til at udvikle en algoritme, der kunne gøre det muligt for autonome køretøjer at navigere gennem et ukendt miljø, undgå kollision med andre robotter/forhindringer."
Multirobotsystemer involverer en række robotagenter eller autonome køretøjer, der samarbejder om en række forskellige opgaver. Disse systemer kan have interessante anvendelser på en række områder, inklusive transport, underholdning, sikkerhed og udforskning af rummet.
Når flere robotter arbejder sammen om en given opgave, deres baner kræver omhyggelig planlægning for at sikre, at robotterne ikke kolliderer med hinanden, og at deres dynamiske grænser ikke bliver overtrådt. Indtil nu, de fleste tilgange til banegenerering er blevet centraliseret, hvilket betyder, at de genererer baner på forhånd og derefter overfører dem til individuelle robotter.
Mens centraliserede tilgange fungerer godt i kendte miljøer og med et begrænset antal robotter, de er meget svære at anvende i større skala. I de seneste år, derfor, forskere har arbejdet på decentraliserede tilgange, der løbende kan omplanlægge baner, reagere på uventede ændringer eller forhindringer i miljøet.
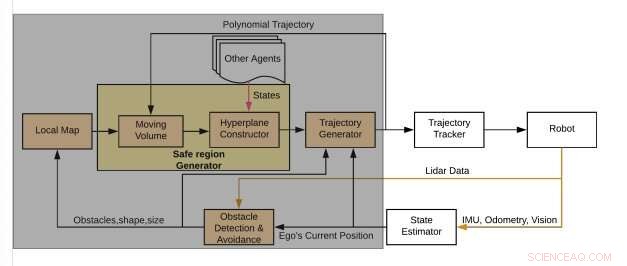
Systemoversigten over en individuel agent. De orange pile repræsenterer rådata, rød repræsenterer data fra eksterne kilder, og sort repræsenterer behandlede data og flowside. Fokus for dette arbejde er den skraverede del. Kredit:Govind Aadithya R et al.
Holdet af forskere ved SRM Institute udviklede en ny decentraliseret algoritme til banegenerering af multi-agent-systemer. Deres tilgang følger en to-trins proces, generere kollisionsfrie konvekse områder, som en robot vil være begrænset i, ved at forudsige andre robotters positioner.
"Vores tilgang har to delmål. Den første er identifikation af miljøet, som omfatter kortgenerering til selvet og baneforudsigelse for andre i miljøet for at identificere egoets (fra det pågældende køretøjs synspunkt) sikre region, "Govind Aadithya R, en af de forskere, der har udført undersøgelsen, Fortalte TechXplore. "Derefter kommer målet om at navigere inden for den sikre region for at nå den ønskede destination, for hvilket vi genererer egoets bane med den tilgængelige information og omplanlægger den regelmæssigt for at tage højde for ændringer, der sker omkring egoet. For at sikre, at egoet bevæger sig langs den angivne vej, staterne spores ved hjælp af en trajectory tracker."
Govind og hans kolleger brugte en simpel metode til forhindringsdetektion, ved hjælp af lokale formbaserede kort til at formulere sikre områder for individuelle agenter. Baseret på disse data, deres algoritme forudsiger baner for andre robotter og inkorporerer disse i modellen for at undgå kollisioner ved at ændre størrelsen på de områder, hvor en robot kan navigere uden at kollidere.
"For mig, en af de mest meningsfulde ting fra dette arbejde er, at kontinuerlig kollisionskontrol er af største betydning for sikker kollisionsfri navigation, "Shravan Krishnan, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Også, for at undgå kollisioner, vi fandt ud af, at komplekse kortlægningsteknikker ikke er af afgørende betydning, men stadig er en nødvendighed, når man skal håndtere optimal udnyttelse af pladsen. Dette indebærer, at for konservative manøvrer, forhindringsrepræsentationerne baseret på simpel geometri er tilstrækkelige, men til dynamiske og aggressive manøvrer, der udnytter fuld plads, komplekse geometrier er en nødvendighed."
Forskerne evaluerede deres tilgang i simuleringer på Gazebo-platformen, brug af ROS med flade luftrobotter og ikke-holonomiske hjulrobotter; i både krydslignende og ustrukturerede miljøer. Deres algoritme var i stand til effektivt at generere glatte baner i begrænsede miljøer, undgå kollisioner mellem robotter.
"For at tage dette fremad, vi vil gerne udvide algoritmen i 3-D, tilføjer endnu en dimension, "Vijay Arvindh B, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Vi arbejder i øjeblikket på de fejl, der skal rettes for at evaluere algoritmen i 3-D."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Havneoperatøren DP World er nu fast i hyperloop-branchenDubais hersker Sheikh Mohammed bin Rashid Al Maktoum, Emiraternes vicepræsident og premierminister, venstre, ved siden af Richard Branson se Hyperloop One-præsentationen ombord på Queen Elizabeth 2
Havneoperatøren DP World er nu fast i hyperloop-branchenDubais hersker Sheikh Mohammed bin Rashid Al Maktoum, Emiraternes vicepræsident og premierminister, venstre, ved siden af Richard Branson se Hyperloop One-præsentationen ombord på Queen Elizabeth 2 -
 PSA's bestyrelse godkender Fiat-Chrysler-fusion:kildeFusionen ville producere den fjerdestørste bilproducent Den franske bilproducent PSAs bestyrelse godkendte tirsdag en megafusion med Fiat-Chrysler for at skabe verdens fjerdestørste bilproducent.
PSA's bestyrelse godkender Fiat-Chrysler-fusion:kildeFusionen ville producere den fjerdestørste bilproducent Den franske bilproducent PSAs bestyrelse godkendte tirsdag en megafusion med Fiat-Chrysler for at skabe verdens fjerdestørste bilproducent. -
 FoodTracker:En AI-drevet fødevaredetektion mobil applikationRealtidsdetekteringstilstand (til venstre) og ernæringsanalyse fra det lokale galleri (til højre) i FoodTracker-appen. Kredit:Sun, Radecka &Zilic. Et forskerhold ved McGill University i Canada har
FoodTracker:En AI-drevet fødevaredetektion mobil applikationRealtidsdetekteringstilstand (til venstre) og ernæringsanalyse fra det lokale galleri (til højre) i FoodTracker-appen. Kredit:Sun, Radecka &Zilic. Et forskerhold ved McGill University i Canada har -
 Tech-giganter sigter mod at koordinere kampen om misinformation:rapportStore teknologivirksomheder var angiveligt samlet i Twitters hovedkvarter i San Francisco for at diskutere koordinering af indsatsen for at imødegå udenlandske misinformationskampagner Store tekno
Tech-giganter sigter mod at koordinere kampen om misinformation:rapportStore teknologivirksomheder var angiveligt samlet i Twitters hovedkvarter i San Francisco for at diskutere koordinering af indsatsen for at imødegå udenlandske misinformationskampagner Store tekno
- At betale for coronavirus skal være som krigsgæld – spredt over generationer
- At transformere kulstoføkonomien
- Bergarter og deres modstand mod vejrforhold
- Hvad er Lexan Glass?
- Optisk kohærenstomografi måler øjnenes mekanik som reaktion på hjerteslag
- Holder det virkelig at tappe din dåse øl fra at bruse over dig?