


Brug af en maskinlæringsteknik til at gøre en hundelignende robot mere adræt og hurtigere
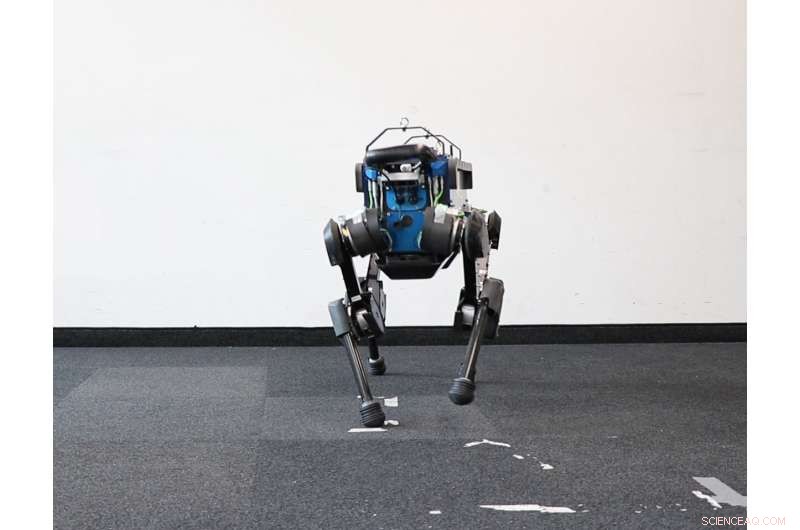
ANYmal-robotten. Kredit:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
Et team af forskere med Robotic Systems Lab i Schweiz og Intelligent Systems Lab i Tyskland og USA har fundet en måde at anvende maskinlæring på robotteknologi for at give sådanne maskiner større evner. I deres papir offentliggjort i tidsskriftet Videnskab robotik , gruppen beskriver, hvordan de anvendte maskinlæring til robotteknologi og dermed gav en hundelignende robot mere smidighed og hastighed.
Machine learning har været i nyhederne på det seneste, som sådanne systemer fortsætter med at snige sig op på menneskelige evner, hvilket giver dem hidtil usete evner. I denne nye indsats, forskerne forsøgte at anvende noget af den samme forbedring på en hundelignende robot kaldet ANYmal - en ubundet maskine på størrelse med en stor hund, der kan gå rundt på måder, der ligner et rigtigt dyrs. ANYmal blev oprindeligt skabt af et team på Robotic Systems Lab og er blevet kommercialiseret. Nu har virksomheden indgået partnerskab med Intelligent Systems Lab for at give robotten en evne til at lære at gøre de ting, den gør gennem praksis, snarere end gennem programmering.
Maskinlæring fungerer ved at opsætte mål for et system og derefter give det et middel til at teste måder at nå disse mål på - løbende forbedres, efterhånden som benchmarks nås. Testen udføres igen og igen, nogle gange tusindvis af gange. Sådan test er vanskelig med en robot både på grund af de mange faktorer, der er involveret (såsom alle de egenskaber, der er involveret i at opretholde balancen) og på grund af den enorme tidsinvestering. Efter at have fundet en måde at løse det første problem på, forskerne fandt en vej uden om den anden. I stedet for at have NOGEN kamp gennem sit læringsregime i den virkelige verden, forskerne skabte en virtuel version af robotten, der kunne køre på en simpel stationær computer.
Forskerne bemærker, at det at lade robotten lære, mens den var i sin virtuelle inkarnation, var cirka 1000 gange hurtigere, end det ville have været i den virkelige verden. De lod den virtuelle hund træne sig selv i op til 11 timer og downloadede derefter resultaterne til den fysiske robot. Test viste, at tilgangen fungerede meget godt. Den nye og forbedrede version af ANYmal var mere adræt (i stand til at forhindre et menneske i at sparke den omkuld og kunne rette sig selv, hvis den faldt), og den kørte cirka 25 procent hurtigere.
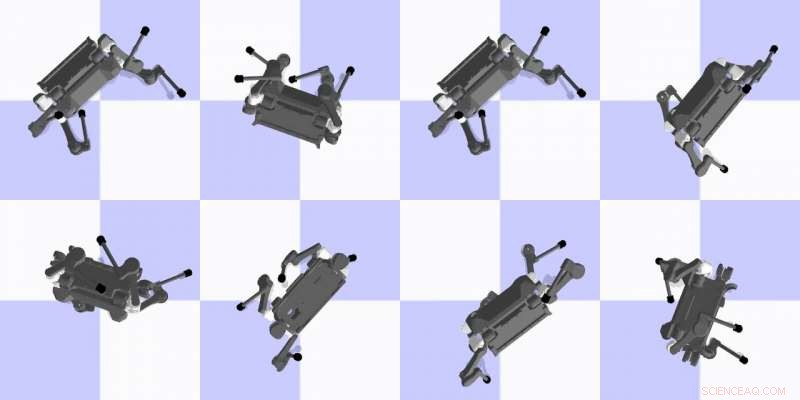
Forskellige faldkonfigurationer af ANYmal-robotten. Kredit:Hwangbo et al., Sci. Robot. 4, eaau5872 (2019)
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Facebook brugte mindre til nyheder, efterhånden som diskussionen bevæger sig mod messaging-appsReuters Institute for the Study of Journalism har udgivet sin syvende årlige Digital News Report. Kredit:Shutterstock Brugen af sociale medier til nyheder er begyndt at falde på en række nøglema
Facebook brugte mindre til nyheder, efterhånden som diskussionen bevæger sig mod messaging-appsReuters Institute for the Study of Journalism har udgivet sin syvende årlige Digital News Report. Kredit:Shutterstock Brugen af sociale medier til nyheder er begyndt at falde på en række nøglema -
 Comcast dropper Fox bud, baner vej til salg til DisneyDenne 14. juni, 2018, filbillede viser 21st Century Fox-logoet uden for dets kontor i New York. Comcast siger, at det dropper ud af budkrigen for Twenty-First Century Fox underholdningsvirksomhed, i s
Comcast dropper Fox bud, baner vej til salg til DisneyDenne 14. juni, 2018, filbillede viser 21st Century Fox-logoet uden for dets kontor i New York. Comcast siger, at det dropper ud af budkrigen for Twenty-First Century Fox underholdningsvirksomhed, i s -
 Vietnam ser ned på kryptovaluta efter påstået $660 mio.-svindelVietnams premierminister Nguyen Xuan Phuc har underskrevet et direktiv, der opfordrer til at styrke cryptocurrency-reglerne Vietnam har lovet at stramme reglerne for kryptovalutaer, mens myndighed
Vietnam ser ned på kryptovaluta efter påstået $660 mio.-svindelVietnams premierminister Nguyen Xuan Phuc har underskrevet et direktiv, der opfordrer til at styrke cryptocurrency-reglerne Vietnam har lovet at stramme reglerne for kryptovalutaer, mens myndighed -
 Amerikansk militær investerer 2 mia. USD i næste generations kunstig intelligensEn militærrobot udstationeret med NATO-tropper i Letland bliver inspiceret af den canadiske premierminister Justin Trudeau i juli 2018. Pentagons forskningsafdeling sagde fredag, at den investered
Amerikansk militær investerer 2 mia. USD i næste generations kunstig intelligensEn militærrobot udstationeret med NATO-tropper i Letland bliver inspiceret af den canadiske premierminister Justin Trudeau i juli 2018. Pentagons forskningsafdeling sagde fredag, at den investered
- NRL forsker i floder på himlen
- Thinsulate temperaturvurderinger
- Domstolssoftware er muligvis ikke mere præcis end webundersøgelsesdeltagere til at forudsige krimi…
- Saltets indvirkning på is Cubes
- Sådan fungerer ConnectR
- Klip af snoren:Efterhånden som priserne stiger, her er hvordan du stadig kan spare penge på stream…