


En ny overvåget læringstilgang til at forstå planlægning i robotter

Præcision (venstre) og kraft (højre) greb genereret af gribeplanlæggeren. Kredit:Lu &Hermans.
Forskere ved University of Utah har for nylig udviklet en probabilistisk grebsplanlægger, der eksplicit kan modellere grebstyper for at planlægge højkvalitets præcision og kraftgreb i realtid. Deres overvågede læringstilgang, skitseret i et papir, der er forududgivet på arXiv, kan effektivt planlægge både kraft- og præcisionsgreb for et givent objekt.
For både mennesker og robotter, forskellige manipulationsopgaver kræver forskellige typer greb. For eksempel, holder et tungt værktøj, såsom en hammer, kræver et kraftgreb med flere fingre, der giver stabilitet, mens du holder en kuglepen kræver det et præcisionsgreb med flere fingre, da dette kan give genstanden fingerfærdighed.
Når de tester deres tidligere tilgang til at forstå planlægning, teamet af forskere ved University of Utah bemærkede, at det næsten altid genererede kraftgreb, hvor robottens hånd vikler sig om en genstand, med store kontaktområder mellem hånden og objektet. Disse greb er nyttige til at udføre en række robotopgaver, såsom at samle genstande op et andet sted i rummet, alligevel er de uhjælpsomme, når de udfører manipulationsopgaver i hånden.
"Tænk på at flytte en pensel eller skalpel, du holder med fingerspidserne, "Tucker Hermans, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Denne slags opgaver kræver præcisionsgreb, hvor robotten holder genstanden med fingerspidserne. Ser man på litteraturen, vi så, at eksisterende metoder har tendens til kun at generere én slags greb, enten præcision eller kraft. Så vi satte os for at skabe en greb-syntese-tilgang, der kan håndtere begge dele. Denne måde, vores robot kan bruge kraftgreb til stabilt at vælge og placere genstande, den vil flytte, men præcisionen griber, når den skal udføre manipulationsopgaver i hånden."
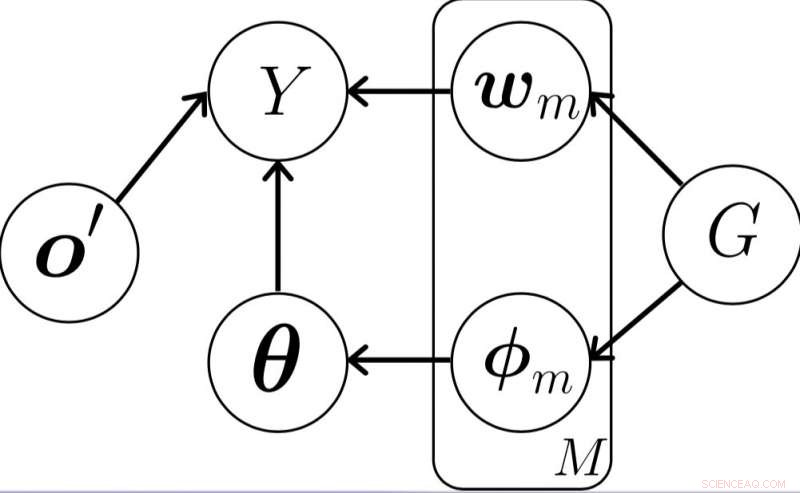
Den foreslåede greb-type probabilistiske grafiske model. Kredit:Lu &Hermans.
I tilgangen til at forstå planlægning udtænkt af Hermans og hans kollega Qingkai Lu, en robot lærer at forudsige succes fra tidligere erfaringer. Robotten forsøger forskellige typer greb på forskellige objekter, registrering af, hvilke af disse der lykkedes, og hvilke der mislykkedes. Disse data bruges derefter til at træne en klassifikator til at forudsige, om en given forståelse vil lykkes eller ej.
"Klassifikatoren tager som input et dybdebillede af objektet og den valgte grebskonfiguration (dvs. hvor man skal placere hånden og hvordan man former fingrene), " forklarede Hermans. "Ud over at forudsige succes, klassificereren rapporterer, hvor sikkert det er, at grebet vil lykkes på en skala fra nul til en. Når præsenteret for en genstand at gribe, robotten planlægger et greb ved at søge over forskellige mulige greb og vælge det greb, som klassificereren forudsiger den højeste tillid til at lykkes."
Den overvågede læringstilgang udviklet af Hermans og Lu kan planlægge forskellige typer greb for tidligere usete objekter, selv når kun delvis visuel information er tilgængelig. Deres kunne være den første grebsplanlægningsmetode til eksplicit at planlægge både kraft- og præcisionsgreb.
-
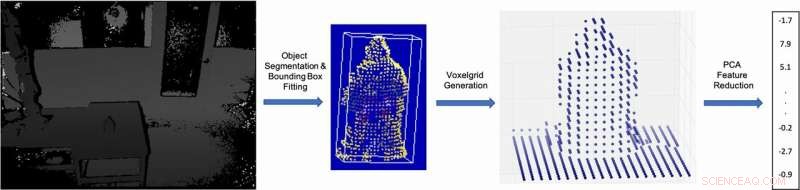
Illustration af den visuelle funktions udvindingsprocessen. Kredit:Lu &Hermans.
-

Eksempel RGB-billede genereret af Kinect2-kameraet, der viser robotten og den lego-lignende genstand på bordet. Kredit:Lu &Hermans.
Forskerne evaluerede deres model og sammenlignede den med en model, der ikke koder for grebstypen. Deres resultater tyder på, at modellering af grebstype kan forbedre succesraten for genererede greb, med deres model, der overgår den anden metode.
"Vi mener, at vores resultater er vigtige på to meningsfulde måder, " sagde Hermans. "For det første, vores foreslåede tilgang gør det muligt for en robot eksplicit at vælge den form for greb, den ønsker, løse det problem, vi satte os for at løse. Sekund, og potentielt vigtigere, tilføjelse af denne greb-type viden til systemet forbedrer faktisk robottens evne til at gribe objekter. Dermed, selvom du kun vil have én type greb, sige magt greb, det hjælper stadig at vide, at der findes præcisionsgreb, når man lærer at forstå."
Den tilgang, som Hermans og Lu har udtænkt, kan hjælpe med udviklingen af robotter, der kan generere et mangfoldigt sæt greb. Dette ville i sidste ende give disse robotter mulighed for at udføre en bredere vifte af opgaver, som indebærer forskellige typer objektmanipulation.
-

Eksempler på vellykkede præcisions- og kraftgreb genereret af den nye grebsmodelleringstilgang til grebsplanlægning. De to øverste rækker er præcisionsgreb. De to nederste rækker er kraftgreb. Kredit:Lu &Hermans.
-

Præcision (venstre) og kraft (højre) greb genereret af den nye gribeplanlægger. Kredit:Lu &Hermans.
"Vi ser nu på to direkte forlængelser af dette arbejde, " sagde Hermans. "For det første, vi ønsker at undersøge virkningerne af at modellere flere typer greb, for eksempel, skelne mellem undertyper af præcisionsgreb karakteriseret ved, at forskellige segmenter af fingeren kommer i kontakt med objektet. For at opnå dette, vi planlægger at udvide robothånden med hud for at muliggøre automatisk registrering af, hvor kontakter er skabt. Sekund, vi ønsker at inkorporere flere oplysninger for at hjælpe med automatisk at vælge den passende type greb givet en anmodet opgave. For eksempel, hvordan kan robotten automatisk beslutte, at den skal bruge et præcisionsgreb til at skabe et maleri, uden at operatøren har fortalt det?"
© 2019 Science X Network
Sidste artikelAdaptiv bevægelse af kunstige mikrosvømmere
Næste artikelIntel annoncerer Israels udvidelsesregering værdier til $10 mia
 Varme artikler
Varme artikler
-
 YouTube vil lægge endnu mere opmærksomhed på læring i 2020Kredit:CC0 Public Domain Nævn YouTube til en forælder, og du får flere tanker. I bedste fald, det er en babysitter og en pædagogisk ressource. Men det er også et websted, man skal være på vagt ov
YouTube vil lægge endnu mere opmærksomhed på læring i 2020Kredit:CC0 Public Domain Nævn YouTube til en forælder, og du får flere tanker. I bedste fald, det er en babysitter og en pædagogisk ressource. Men det er også et websted, man skal være på vagt ov -
 Mysteriet om NSA-lækage hænger ved, mens den stjålne dokumentsag enderI denne 6. juni, 2013 filbillede, skiltet uden for National Security Administration (NSA) campus i Fort Meade, Md. Et højt profileret razzia i hjemmet hos en NSA-entreprenør så ud til at være forbunde
Mysteriet om NSA-lækage hænger ved, mens den stjålne dokumentsag enderI denne 6. juni, 2013 filbillede, skiltet uden for National Security Administration (NSA) campus i Fort Meade, Md. Et højt profileret razzia i hjemmet hos en NSA-entreprenør så ud til at være forbunde -
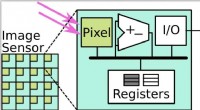 Nye lokaliserings- og kortlægningsværktøjer i realtid til robotik, VR, og ARFocal-plane Sensor-Processor Arrays (FPSPer) er parallelle behandlingssystemer, hvor hver pixel har et behandlingselement. Kredit:Saeedi et al. En stor gruppe forskere ved Imperial College London,
Nye lokaliserings- og kortlægningsværktøjer i realtid til robotik, VR, og ARFocal-plane Sensor-Processor Arrays (FPSPer) er parallelle behandlingssystemer, hvor hver pixel har et behandlingselement. Kredit:Saeedi et al. En stor gruppe forskere ved Imperial College London, -
 Uber truer med at trække sig tilbage fra BarcelonaTaxichauffører blokerede vejen i Madrid uden for en af verdens største turistmesser, brændende dæk og en skraldespand Uber truede onsdag med at trække sig tilbage fra Barcelona, efter at den r
Uber truer med at trække sig tilbage fra BarcelonaTaxichauffører blokerede vejen i Madrid uden for en af verdens største turistmesser, brændende dæk og en skraldespand Uber truede onsdag med at trække sig tilbage fra Barcelona, efter at den r
- Første resultater fra Lucky Spectroscopy, en ækvivalent teknik til Lucky Imaging
- Hundredvis af kinesiske borgere fortalte mig, hvad de mente om det kontroversielle sociale kreditsys…
- Dråber af flydende krystalmolekyler forgrener sig til mærkelige strukturer
- Fysikere observerer ny fase i Bose-Einstein-kondensat af lette partikler
- Ændringer i brandaktivitet truer mere end 4, 400 arter globalt
- Mikrober efterlader fingeraftryk på Mars -klipper