


Adaptiv bevægelse af kunstige mikrosvømmere
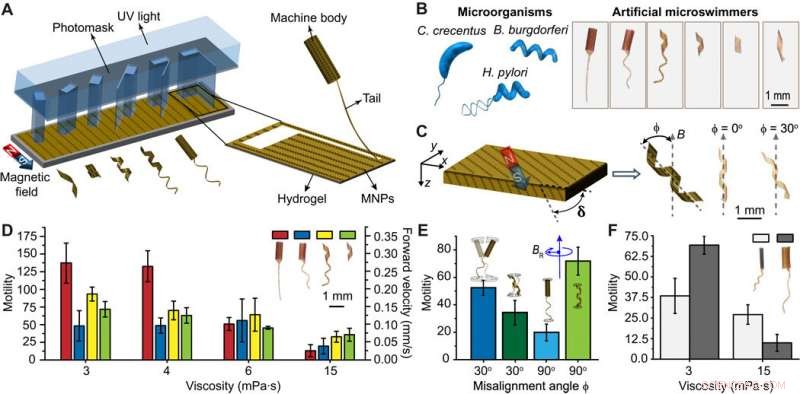
(A) En kirigami-tilgang til at bygge massetilpassede bløde mikrosvømmere gennem en enkelt-trins fotolitografi. UV, ultraviolet. (B) Skematisk illustration af bakterierne taget som inspiration til denne undersøgelse og de optiske billeder af de konstruerede kunstige mikrosvømmere. (C) Out-of-plane justering (δ ≠ 0) af MNP'er fører til ikke-nul fejljusteringsvinkel (ϕ). De optiske billeder, der viser to svømmere med identiske former og varierende ϕ, er vist. (D) En sammenligning af bevægeligheden af mikrosvømmere, der svømmer i væsker med forskellige viskositeter. (E) Motilitet af de flagellerede rørformede mikrosvømmere og spiralformede mikrosvømmere kodet med to forskellige magnetiske anisotropier, der roterer i en opløsning med en viskositet på 3 mPa·s. (F) Effekt af kropsstørrelse på bevægeligheden af de rørformede mikrosvømmere. Svømmerne blev kørt ved 2 Hz med en feltstyrke på 20 mT i alle forsøg, medmindre andet er angivet. Alle søjlediagrammer repræsenterer gennemsnit ± SEM (n =6 målinger for hver mikrosvømmer og tre forskellige svømmere testet pr. tilstand). Kredit:Science Advances, doi:10.1126/sciadv.aau1532
Bakterier udviser bemærkelsesværdig plasticitet ved at udnytte mekanikken som reaktion på lokalt skiftende fysiske og kemiske forhold. Overensstemmende strukturer hjælper normalt deres taxiers adfærd med at navigere i komplekse og strukturerede miljøer. Bioinspirerede mikrobiologiske mekanismer indeholder rationelt designede arkitekturer, der er i stand til store, ikke-lineær deformation for at indføre autonomi i konstruerede små enheder.
I en nylig undersøgelse, H.W. Huang og kolleger i afdelingerne for maskinteknik, anvendt matematik og teoretisk fysik, analyseret virkningerne af hydrodynamiske kræfter og rheologi af lokale omgivelser på svømning ved lavt Reynolds-tal. I arbejdet, de identificerede udfordringerne og fordelene ved at bruge elasto-hydrodynamisk kobling i bevægelse til at udvikle en række maskiner til at bygge ubundne mikrorobotter med selvreguleret mobilitet. Forskerne var i stand til at demonstrere koblingen mellem de strukturelle og magnetiske egenskaber af kunstige mikrosvømmere med væskens dynamiske egenskaber, under adaptiv bevægelse i fravær af indbyggede sensorer. Resultaterne er nu offentliggjort i Videnskabens fremskridt .
Mikroorganismer indeholder forskellige maskiner til molekylær bevægelse til effektivt at navigere i komplekse miljøer og økologiske nicher. I bakterier, svømning opstår fra den mekaniske interaktion mellem de aktiverede flageller, cellelegeme og træk, der genereres af flowet. Viskøse kræfter ved lavt Reynolds-tal er ansvarlige for hydrodynamisk modstand, hvilket igen afhænger af formen på bevægelige objekter.
For at optimere deres motilitet, bakterier kan antage alternative former og størrelser i løbet af deres livscyklus. Ud over at ændre kropsform, bakterier kan også bruge fremdriftssystemer til avanceret bevægelse i komplekse miljøer. For eksempel, ved at bøje en krog kan Caulobacter crescentus øge motiliteten, mens Vibrio alginolyticus kan udkonkurrere multi-flagelleret Escherichia coli i klatring af næringsstofgradienter på grund af flagellær bukningsustabilitet. Desuden, Shewanella putrefaciens kan undslippe fysiske fælder via en polymorf overgang i det flagelle filament.
Mikroskopiske kunstige svømmere, som forskere udviklede via bioinspireret mikroteknologi til at bevæge sig gennem kropsvæsker, på tværs af biologiske barrierer og adgang til fjerntliggende sygdomssteder kunne revolutionere målrettede behandlinger. Pionerarbejde på området har allerede demonstreret muligheden for at efterligne den prokaryote eller eukaryote flagel for at bygge magnetisk kontrollerede mikrosvømmere med ikke-gensidig bevægelse. Imidlertid, i modsætning til levende celler, disse mekaniske enheder kan ikke mærke deres lokale miljø eller tilpasse sig ændringer i fysiske forhold. Kontrol med kunstige materialer kan bane vejen for at bygge tunable, holdbare og robuste tekniske løsninger såsom autonome biohybride robotenheder.
I nærværende arbejde, Huong et al. introducere en enkel og alsidig metode baseret på materialefremstilling til at konstruere magnetisk styrede bløde mikromaskiner. Konceptet er baseret på et 3-D rekonfigurerbart multibody-system konstrueret af et nanokomposit hydrogel monolag. I tidligere arbejde udført af samme forskergruppe, Huang et al. detaljerede formen og magnetiseringsprofilen af selvfoldede mikromaskiner, hvor strukturer kunne programmeres uafhængigt ved at inkorporere magnetiske nanopartikler (MNP'er) i mønstrede hydrogellag.
Til denne undersøgelse, forskerne præsenterede et sæt designstrategier til selvregulering af bevægelse og manøvredygtighed via samspillet mellem viskøse, elastik, magnetiske og osmotiske kræfter. Huang et al. demonstreret, at den rekonfigurerbare krop kontinuerligt kunne forvandle sig i overensstemmelse med den omgivende væske, muliggør bevægelse gennem indsnævringer for forbedret lokomotivydelse. De viste, at elasto-hydrodynamisk kobling i formskift og gangtilpasninger kunne tillade mikrobots at navigere inde i blokerede, heterogene og dynamiske miljøer.
Kropsplanens rolle for manøvredygtighed. Spiralformede mikrosvømmere viste den bedste præstation som forventet, fordi de ikke beskæftiger sig med krops- og halekoordination. Kredit:Science Advances, doi:10.1126/sciadv.aau1532.
Huang et al. konstruerede de bløde mikrosvømmere ved hjælp af bioinspireret bevægelse med en variant af origami kendt som kirigami. De kompatible 3-D mikrostrukturer blev designet ud fra en termoresponsiv gel forstærket med MNP'er (magnetiske nanopartikler). Under fremstillingsprocessen, forskerne påbegyndte skæring via fotolitografi og foldning efter hydrering af det polymeriserede lag. Den uensartede fordeling af MNP'er langs tykkelsesretningen tillod dannelsen af to distinkte lag af hydrogeler med signifikant forskellige kvældningsforhold.
Forskerne fokuserede på tre mikroorganismekonfigurationer, herunder C. crescentus, Helicobacter pylori og Borrelia burgdorferi. Bakterierne svømmer typisk ved at rotere propellignende flagelfilamenter, der strækker sig fra cellekroppen. Biomimik af bevægelsen kunne tillade kunstige mikrosvømmere at bevæge sig, hvis maskinens magnetiske moment var vinkelret på dens lange akse. Imidlertid, strukturerne lignede kompasnåle i stedet, ved at justere deres lange akse efter retningen af det eksterne magnetfelt. For at overvinde denne begrænsning, Huang et al varierede justeringen ud af planet af de medfødte MNP'er i materialet, mens partikeljusteringen i planet holdes konstant.
Dynamisk registrering af magnetiseringsprofilen. Magnetisk forstærkede nanokompositter var i en anden retning end retningen af MNP-justering. Det påførte felt var signifikant højere end det magnetiske felt, der blev påført for at justere partikler under fremstillingen af mikrobotterne. Kredit:Science Advances, doi:10.1126/sciadv.aau1532.
For at optimere bevægelse ved forskellige viskositeter, mikrostrukturerne fik forskellige gangarter. At systematisk udforske den potentielle fordel ved morfologisk mangfoldighed Huong et al. byggede mikrosvømmere med forskellige kropsplaner og aktiverede dem i væsker med varierende viskositet. Forskerne var i stand til at konstruere mikrosvømmere, der fulgte 3-D spiralformede baner ved at koordinere deres morfologi med deres magnetiseringsprofil. I alle forsøg, Reynolds-tallet varierede fra 10 -2 til 10 -4 ; for at indikere svømning under laminar flow.
I en opløsning af saccharose med samme viskositet som blod, de flagellerede mikrosvømmere med en fleksibel plan hale og rørformet krop bevægede sig hurtigere ved spiralformet bevægelse sammenlignet med andre prototyper. Flagelerede mikrosvømmere nød godt af både spiral- og proptrækkerbevægelser, mens spiralformede mikrosvømmere udførte proptrækkerbevægelser. Imidlertid, under øget viskositet faldt bevægelsen af alle mikrosvømmere, men faldet var højest for flagellerede mikrosvømmere med en plan hale. Ved højere viskositet, Huong et al observerede, at spiralformede mikrosvømmere var de hurtigste, da den eneste relevante bevægelse under betingelserne var proptrækkerbevægelse.
Sideløbende med bevægelse, evnen til at regulere bevægelse (manøvredygtighed) spiller en nøglerolle i, at bakterier kan mærke og detektere næringsstofgradienter. Forskerne testede manøvredygtigheden af kunstige mikrosvømmere ved at fremkalde afbøjninger i krøjningsvinklen (rotation) under svømning. En meget manøvredygtig mikrosvømmer kunne hurtigt ændre sin bevægelsesretning med en lille ændring i styresignalet. Under kraftigere forstyrrelser (45-graders krøjerotation) spillede både krops- og halegeometri en vigtig rolle i responsen fra lydhøre mikrosvømmere. Strukturelt set, kroppen reagerede på kontrolsignalet før halen, da magnetiseringen af kroppen var højere. Svømmere med en plan hale viste større modtagelighed for ustabilitet, en spiralformet hale kunne relativt bidrage til stabilisering på grund af højere stivhed af den spiralformede geometri.
Formtilpasning i buede kanaler under aksial strømning med en hastighed på 2 ml/min. Den observerede deformation var elastisk, og svømmere genvandt fuldstændigt deres form efter at have passeret gennem hjørnet under den eksternt påførte strømning med en hastighed på 2 ml/min. Forøgelse af stivheden af filamenterne reducerede deformation og førte til blokering af kanalen. Kredit:Science Advances, doi:10.1126/sciadv.aau1532. 
Huong og kollegaer bestemte fremdriftseffektiviteten af kompatible svømmere ved at koble mellem de magnetiske kræfter, filamentfleksibilitet og tyktflydende træk. De undersøgte de elasto-hydrodynamiske egenskaber for at udløse en gangovergang som reaktion på ændret viskositet. Forskerne observerede opvikling af mikrobothalen ved højere viskositet og frekvens. Den observerede morfologiske overgang eller transformation, bidrog til proptrækkerbevægelse for forbedret mikrobot-motilitet.

Gangtilpasning af rørformede mikrosvømmere med en elastisk hale. Elastohydrodynamiske egenskaber kan udnyttes til at udløse en gangovergang som reaktion på ændringer i lav og høj viskositet. Kredit:Science Advances, doi:10.1126/sciadv.aau1532.
Baseret på omfattende strategier for bevægelse og manøvredygtighed, data opnået i undersøgelsen afslørede, at et rørformet legeme med en plan hale var at foretrække frem for at svømme ved lav viskositet. Forholdsvis en spiralformet morfologi kunne fungere bedre ved højere viskositet. Huong et al. konstrueret en magnetisk rekonfigurerbar mikrosvømmer til at gennemgå formtransformation mellem de to konfigurationer baseret på eksterne forhold. De programmerede mikrosvømmere kunne ændre form for vedvarende fremadgående hastighed og forbedret manøvredygtighed på trods af øgede viskøse kræfter.
På denne måde omhyggelige analyser af svømmepræstationer ved varierende viskositeter gav en retningslinje for at bygge en enkelt mikromaskine. For at løse navigationsproblemet på mikro/nanoskala, Huong et al. reduceret antallet af elementer, der skal kontrolleres for de resulterende fordele ved hastighed, alsidighed og omkostninger. Mikrobotterne kan fremstilles via høj kapacitet og skalerbare metoder til at åbne døre til udviklingen af en række bløde mikrorobotter til medicinske og industrielle applikationer.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 On-the-fly filtreringssystem forbedrer vejrsat billedjusteringGOES-R satellit. Kredit:NASA Satellitbilleder er et afgørende aspekt af det moderne liv. For eksempel, afgrødevækst og udbytteestimater er delvist afledt af satellitbilleder; ligeledes, luftkvalit
On-the-fly filtreringssystem forbedrer vejrsat billedjusteringGOES-R satellit. Kredit:NASA Satellitbilleder er et afgørende aspekt af det moderne liv. For eksempel, afgrødevækst og udbytteestimater er delvist afledt af satellitbilleder; ligeledes, luftkvalit -
 Apple tilbagekalder frivilligt batterier på MacBook Pro notebooks på grund af sikkerhedsrisiko. Hv…Kredit:CC0 Public Domain Apple annoncerede en frivillig tilbagekaldelse af visse 15-tommer MacBook Pro-modeller, der primært blev solgt mellem september 2015 og februar 2017. Det drejer sig om et
Apple tilbagekalder frivilligt batterier på MacBook Pro notebooks på grund af sikkerhedsrisiko. Hv…Kredit:CC0 Public Domain Apple annoncerede en frivillig tilbagekaldelse af visse 15-tommer MacBook Pro-modeller, der primært blev solgt mellem september 2015 og februar 2017. Det drejer sig om et -
 Maskindetektering af menneske-objekt-interaktion i billeder og videoerJia-Bin Huang, assisterende professor i Bradley Department of Electrical and Computer Engineering og et fakultetsmedlem ved Discovery Analytics Center. Kredit:Virginia Tech Jia-Bin Huang, assister
Maskindetektering af menneske-objekt-interaktion i billeder og videoerJia-Bin Huang, assisterende professor i Bradley Department of Electrical and Computer Engineering og et fakultetsmedlem ved Discovery Analytics Center. Kredit:Virginia Tech Jia-Bin Huang, assister -
 YouTube går en snor med sine videoproducenter, annoncørerI denne 28. februar, 2017, filfoto YouTubes administrerende direktør Susan Wojcicki taler under introduktionen af YouTube TV på YouTube Space LA i Los Angeles. YouTubes video-in-review-video inden f
YouTube går en snor med sine videoproducenter, annoncørerI denne 28. februar, 2017, filfoto YouTubes administrerende direktør Susan Wojcicki taler under introduktionen af YouTube TV på YouTube Space LA i Los Angeles. YouTubes video-in-review-video inden f
- Undersøgelse:Hospitalets sikkerhedsvagter udøver overdreven fysisk vold, kræver træning
- Livscyklus af Selaginella
- Billede:Vores sprudlende sol
- Mange galakser skal beskyttes i denne NASA Hubble -udsigt
- Lærere kan bruge populære medier til at adressere anti-asiatisk bias, forskning viser
- Brugte elbilbatterier oplader nettet