


Ny robothånd er blød og stærk
Kredit:Massachusetts Institute of Technology
50 år siden, den første industrirobotarm kaldet Unimate samlede en simpel morgenmad med toast, kaffe, og champagne. Selvom det kunne have lignet en problemfri bedrift, hver bevægelse og placering blev kodet med nøje overvejelse.
Selv med nutidens mere intelligente og adaptive robotter, denne opgave er fortsat vanskelig for maskiner med stive hænder. De har en tendens til kun at arbejde i strukturerede miljøer med foruddefinerede former og placeringer, og kan typisk ikke klare usikkerheder i placering eller form.
I de seneste år, selvom, robotikere har fået styr på dette problem ved at gøre fingre af bløde, fleksibel, materialer som gummi. Denne smidighed lader disse bløde robotter opfange alt fra druer til kasser og tomme vandflasker, men de er stadig ikke i stand til at håndtere store eller tunge genstande.
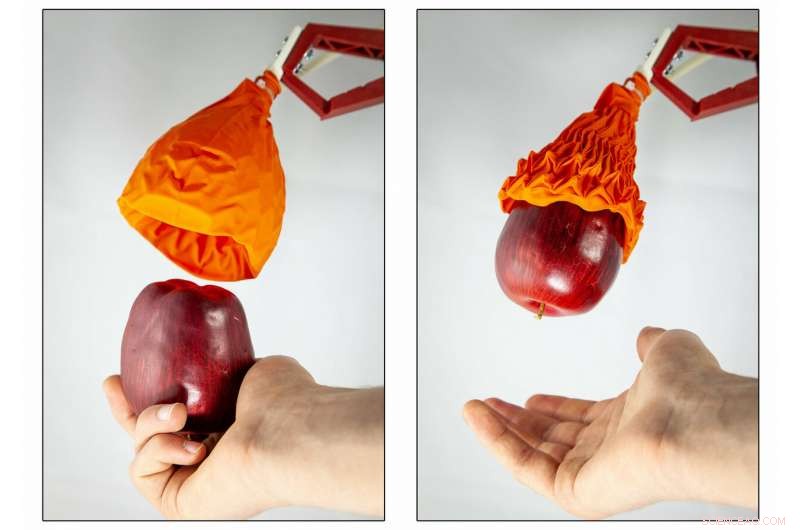
For at give disse bløde robotter lidt af en hånd, forskere fra MIT og Harvard har udviklet en ny griber, der er både blød og stærk:en kegleformet origami-struktur, der kollapser ind på objekter, meget som en Venus fluefælde, at hente varer, der er så meget som 100 gange dens vægt. Denne bevægelse lader griberen gribe et meget bredere udvalg af genstande - såsom suppedåser, hamre, vinglas, droner, og endda en enkelt broccolibuket.
"Et af mine moonshots er at skabe en robot, der automatisk kan pakke dagligvarer til dig, " siger MIT-professor Daniela Rus, direktør for MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL), og en af seniorforfatterne til et nyt papir om projektet.
"Tidligere tilgange til pakningsproblemet kunne kun håndtere meget begrænsede klasser af genstande - genstande, der er meget lette eller genstande, der tilpasser sig former som kasser og cylindre, men med Magic Ball-gribesystemet har vi vist, at vi kan udføre pluk-og-place-opgaver for en lang række genstande lige fra vinflasker til broccoli, vindruer og æg, " siger Rus. "Med andre ord, genstande, der er tunge, og genstande, der er lette. Genstande, der er sarte, eller robust, eller som har almindelige eller frie former."
Projektet er et af flere i de senere år, der har fået forskere til at tænke ud af boksen med robotdesign. Kugleformede gribere, for eksempel, kan håndtere en bredere række af genstande end fingre, men har stadig spørgsmålet om begrænsede vinkler. Blødere robotfingre bruger typisk trykluft, men er ikke stærke nok til at opfange tungere genstande.
Strukturen af denne nye griber, i mellemtiden, antager en helt anden form. Kegleformet, hule, og vakuumdrevet, enheden er inspireret af "origami magic ball" og kan omslutte en hel genstand og med succes samle den op.
Griberen har tre dele:den origami-baserede skeletstruktur, den lufttætte hud for at omslutte strukturen, og stikket. Holdet skabte det ved hjælp af en mekanisk gummiform og en speciel varmekrympende plast, der selvfolder ved høje temperaturer.
Den magiske bolds skelet er dækket af enten en gummiballon eller et tyndt stoflag, ikke ulig holdets tidligere forskning i væskedrevne origami-inspirerede kunstige muskler (FOAM), som bestod af en lufttæt hud omkring et foldbart skelet og væske.
Holdet brugte griberen med en standardrobot til at teste dens styrke på forskellige objekter. Griberen kunne gribe og løfte genstande 70 procent af dens diameter, hvilket gjorde det muligt for den at samle op og holde en række bløde fødevarer uden at forårsage skade. Den kunne også hente flasker, der vejer over fire pund.
"Virksomheder som Amazon og JD ønsker at være i stand til at opfange en bredere vifte af sarte eller uregelmæssige genstande, men kan ikke med fingerbaserede og sugekop-gribere, " siger Shuguang Li, en fælles postdoc ved MIT CSAIL og Harvards John A. Paulson School of Engineering and Applied Sciences (SEAS). "Sugekopper kan ikke opfange noget med huller - og de har brug for noget meget stærkere end en blød fingerbaseret griber."
Robotten fungerer i øjeblikket bedst med cylindriske genstande som flasker eller dåser, som en dag kunne gøre det til et aktiv for produktionslinjer på fabrikker. Ikke overraskende, formen på griberen gør det sværere for den at gribe noget fladt, som en sandwich eller bog.
"Et af de vigtigste træk ved denne tilgang til manipulatorkonstruktion er dens enkelhed, " siger Robert Wood, medforfatter og professor ved Harvard's School of Engineering og Wyss Institute for Biologically Inspired Engineering. "De anvendte materialer og fremstillingsstrategier giver os mulighed for hurtigt at prototype nye gribere, tilpasset til objekt eller miljø efter behov."
I fremtiden, holdet håber at forsøge at løse problemet med vinkel og orientering ved at tilføje computersyn, der ville lade griberen "se", og gøre det muligt at gribe bestemte dele af objekter.
"Dette er en meget smart enhed, der bruger kraften i 3-D-print, et vakuum, og blød robotteknologi til at nærme sig problemet med at gribe på en helt ny måde, " siger Michael Wehner, en adjunkt i robotteknologi ved UC-Santa Cruz, som ikke var involveret i projektet. "I de kommende år Jeg kunne forestille mig at se bløde robotter blide og behændige nok til at plukke en rose, men alligevel stærk nok til sikkert at løfte en hospitalspatient."
 Varme artikler
Varme artikler
-
 Forskere opretter den første sensorpakke, der kan ride ombord på bierBier med “rygsække” på kan stadig spise, kontrollere deres flugt og udføre anden normal adfærd. Kredit:Mark Stone/University of Washington Forskere ved University of Washington har lavet en sensor
Forskere opretter den første sensorpakke, der kan ride ombord på bierBier med “rygsække” på kan stadig spise, kontrollere deres flugt og udføre anden normal adfærd. Kredit:Mark Stone/University of Washington Forskere ved University of Washington har lavet en sensor -
 Mød havets nye vogtere - robotvandmændKredit:Simon Davies Nye robotvandmænd kan være nøglen til at overvåge og pleje skrøbelige dele af verdenshavene uden at beskadige dem. Robotterne er udviklet af et hold amerikanske videnskabsmænd
Mød havets nye vogtere - robotvandmændKredit:Simon Davies Nye robotvandmænd kan være nøglen til at overvåge og pleje skrøbelige dele af verdenshavene uden at beskadige dem. Robotterne er udviklet af et hold amerikanske videnskabsmænd -
 Apple skal undervise kvinder i teknologi i et forsøg på at diversificere industrienI denne 27. okt. 2016, fil foto, en gæst ser på Touch Bar på en MacBook-computer vist i et demo-rum efter annonceringen af nye produkter i Apples hovedkvarter, i Cupertino, Californien Apple åbner e
Apple skal undervise kvinder i teknologi i et forsøg på at diversificere industrienI denne 27. okt. 2016, fil foto, en gæst ser på Touch Bar på en MacBook-computer vist i et demo-rum efter annonceringen af nye produkter i Apples hovedkvarter, i Cupertino, Californien Apple åbner e -
 Bør du bekymre dig om Boeing 737? Kun hvis du driver et flyselskabKredit:CC0 Public Domain Revnerne fundet i tre Qantas-ejede Boeing 737er i sidste uge førte til opfordringer om, at det skulle sætte sine 33 fly på jorden med en lignende servicerekord. Selvom de
Bør du bekymre dig om Boeing 737? Kun hvis du driver et flyselskabKredit:CC0 Public Domain Revnerne fundet i tre Qantas-ejede Boeing 737er i sidste uge førte til opfordringer om, at det skulle sætte sine 33 fly på jorden med en lignende servicerekord. Selvom de