


Grundlæggende for robotstrategier inden for miljøbeskyttelse

Robotten er designet af Wyss Institute-forskere til at drive sammenlåsende spuns ned i granulær jord som sand på en strand. Kredit:Wyss Institute ved Harvard University
Langs udviklede flodbredder, fysiske barrierer kan hjælpe med at begrænse oversvømmelser og bekæmpe erosion. I tørre områder, Tjek dæmninger kan hjælpe med at fastholde jord efter nedbør og genoprette beskadigede landskaber. I byggeprojekter, metalplader kan yde støtte til udgravninger, støttemure på skråninger, eller faste fonde. Alle disse applikationer kan løses ved brug af spuns, elementer foldet af fladt materiale og drevet lodret ned i jorden for at danne vægge og stabilisere jord. Korrekt jordstabilisering er nøglen til bæredygtig arealforvaltning i industrier som byggeri, minedrift, og landbrug; og jordforringelse, tab af økosystemtjenester fra et givet terræn, er en drivkraft bag klimaændringer og anslås at koste op til 10 billioner dollars årligt.
Med denne motivation, et team af robotikere ved Harvards Wyss Institute for Biologically Inspired Engineering har udviklet en robot, der selvstændigt kan drive sammenlåsende stålspuns ned i jorden. De strukturer, den bygger, kunne fungere som støttemure eller kontrollere dæmninger for erosionskontrol. Undersøgelsen vil blive præsenteret på den kommende IEEE internationale konference om robotteknologi og automatisering i 2019.
Konventionelle spunsrivningsprocesser er ekstremt energikrævende. Kun en brøkdel af vægten af typiske tunge maskiner bruges til at påføre nedadgående kraft. Wyss-teamets "Romu"-robot, på den anden side, er i stand til at udnytte sin egen vægt til at slå spuns ned i jorden. Dette er gjort muligt ved at hvert af dets fire hjul er koblet til en separat lineær aktuator, hvilket også gør det muligt at tilpasse sig ujævnt terræn og sikre at pæle bliver slået lodret. Fra en hævet position, Romu tager fat i en spuns og sænker derefter dens chassis, at presse bunken ned i jorden ved hjælp af en indbygget vibrationshammer. Ved at gribe bunken igen i en højere position og gentage denne proces, robotten kan køre en bunke meget højere end sin egen række af lodret bevægelse. Efter at have slået en pæl til tilstrækkelig dybde, Romu går frem og installerer den næste bunke, så den låser sammen med den forrige, derved dannes en sammenhængende væg. Når den har brugt alle de bunker, den bærer, det kan vende tilbage til en forsyningscache for at genopbygge.
Undersøgelsen voksede ud af tidligere arbejde på Wyss Institute på hold eller sværme af robotter til konstruktionsapplikationer. I arbejde inspireret af højbyggende termitter, Kernefakultetets medlem Radhika Nagpal og seniorforsker Justin Werfel designede et autonomt robotbyggehold kaldet TERMES, hvis medlemmer arbejdede sammen om at bygge komplekse strukturer af specialiserede mursten. Yderligere arbejde af Werfel og forskeren Nathan Melenbrink udforskede spankulerende klatrerobotter, der er i stand til at bygge udkragende truss-strukturer, adressering af applikationer som broer. Imidlertid, ingen af disse undersøgelser adresserede udfordringen med at forankre strukturer til jorden. Romu-projektet begyndte som en udforskning af metoder til automatiseret byggepladsforberedelse og installation af fundamenter til de tidligere systemer at bygge videre på; som det udviklede sig, teamet fastslog, at sådanne indgreb også kunne være direkte anvendelige på genoprettelsesopgaver i fjerntliggende miljøer.
"Ud over tests i laboratoriet, vi demonstrerede Romu, der opererede på en nærliggende strand, " sagde Melenbrink. "Denne form for demonstration kan være en isbryder for en bredere samtale omkring muligheder for automatisering i byggeri og arealforvaltning. Vi er interesserede i at engagere os med eksperter inden for beslægtede områder, som kan se potentielle fordele ved den slags automatiserede interventioner, vi udvikler."
Forskerne forestiller sig et stort antal Romu-robotter, der arbejder sammen som et kollektiv eller en sværm. De demonstrerede i computersimuleringer, at hold af Romu-robotter kunne gøre brug af miljømæssige signaler som skråningers stejlhed for at bygge mure på effektive steder, effektiv udnyttelse af begrænsede ressourcer. "Sværmtilgangen giver fordele som speedup gennem parallelisme, robusthed over for tab af individuelle robotter, og skalerbarhed for store teams, " sagde Werfel. "Ved at reagere i realtid på de forhold, de rent faktisk møder, mens de arbejder, robotterne kan tilpasse sig uventede eller skiftende situationer, uden at skulle stole på en masse understøttende infrastruktur til evner som site surveying, meddelelse, eller lokalisering."
"Navnet Terramanus ferromurus (Romu) er et vink til begrebet 'maskinøkologi', hvor autonome systemer kan introduceres i naturlige miljøer som nye deltagere, træffe specifikke foranstaltninger for at supplere og fremme menneskelig miljøforvaltning, " sagde Melenbrink. I fremtiden, Terramanus "slægten" kunne udvides med yderligere robotter, der udfører forskellige opgaver for at beskytte eller genoprette økosystemtjenester. Baseret på deres resultater, holdet er nu interesseret i at undersøge indgreb lige fra grundvandsretentionsstrukturer til støtte for landbruget i tørre områder, til responsiv oversvømmelsesbarrierekonstruktion til orkanberedskab. Fremtidige versioner af robotten kan udføre andre indgreb, såsom at sprøjte jordbindende midler eller installere silthegn, sådan at en familie af disse robotter kunne fungere for at stabilisere jorden i en lang række situationer.
I mange scenarier for miljøbeskyttelse eller restaurering, muligheden for handling er begrænset af tilgængeligheden af menneskelig arbejdskraft og af adgangen til stedet for tungt maskineri. Mindre, mere alsidige entreprenørmaskiner kunne give en løsning. "Klart, the needs of many degraded landscapes are not being met with the currently available tools and techniques, " said Melenbrink. "Now, 100 years after the dawn of the heavy equipment age, we're asking whether there might be more resilient and responsive ways to approach land management and restoration."
"This sheet pile driving robot with its demonstrated ability to perform in a natural setting signals a path on which the Wyss Institute's robotics and swarm robotics capabilities can be brought to bear on both natural and man-made environments where conventional machinery, man power limitations, or cost is inadequate to prevent often disastrous consequences. This robot also could address disaster situations where walling off dangerous chemical spills or released radioactive fluids makes it difficult or impossible for humans to intervene, " said Wyss Institute Founding Director Donald Ingber, M.D., Ph.D., who is also the Judah Folkman Professor of Vascular Biology at HMS and the Vascular Biology Program at Boston Children's Hospital, as well as Professor of Bioengineering at SEAS.
 Varme artikler
Varme artikler
-
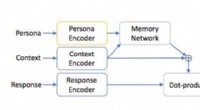 Facebook-forskere bygger et datasæt til at træne personlige dialogagenterPersona-baseret netværksarkitektur. Kredit:Mazaré et al. Forskere på Facebook har for nylig udarbejdet et datasæt med 5 millioner personas og 700 millioner persona-baserede dialoger. Denne databas
Facebook-forskere bygger et datasæt til at træne personlige dialogagenterPersona-baseret netværksarkitektur. Kredit:Mazaré et al. Forskere på Facebook har for nylig udarbejdet et datasæt med 5 millioner personas og 700 millioner persona-baserede dialoger. Denne databas -
 Verdens største telefonshow åbner under catalansk løsrivelsesskyPro-uafhængighedsdemonstranter samledes i Barcelona for at protestere mod et besøg af Spaniens konge til den ceremoni, der indviede Mobile World Congress Verdens største telefonshow åbnede i Barce
Verdens største telefonshow åbner under catalansk løsrivelsesskyPro-uafhængighedsdemonstranter samledes i Barcelona for at protestere mod et besøg af Spaniens konge til den ceremoni, der indviede Mobile World Congress Verdens største telefonshow åbnede i Barce -
 Selvkørende testkøretøj tilføjet til autohistorisk museumPå et billede leveret af Henry Ford Museum, en Chevrolet Bolt, en af General Motors første selvkørende testkøretøjer vises. Henry Ford annoncerede tirsdag, 12 marts, 2019, at den modificerede forpro
Selvkørende testkøretøj tilføjet til autohistorisk museumPå et billede leveret af Henry Ford Museum, en Chevrolet Bolt, en af General Motors første selvkørende testkøretøjer vises. Henry Ford annoncerede tirsdag, 12 marts, 2019, at den modificerede forpro -
 Er Spotify den nye Tinder? Det er til dette parKredit:CC0 Public Domain Stryg til højre. Så til venstre, en anden venstre, så til venstre igen. Det er den typiske bevægelse, din tommelfinger kan gennemgå, hvis du forsøger at finde den ene på e
Er Spotify den nye Tinder? Det er til dette parKredit:CC0 Public Domain Stryg til højre. Så til venstre, en anden venstre, så til venstre igen. Det er den typiske bevægelse, din tommelfinger kan gennemgå, hvis du forsøger at finde den ene på e
- Nogle få almindelige bakterier står for størstedelen af kulstofforbruget i jorden
- Race påvirker risikoen for oversvømmelser
- Hemmeligheden bag årstidens bedste varm chokolade? Det hele ligger i kemien!
- Coronavirus har ført til store holdningsændringer til forældreansvar for børns uddannelse
- På vej til at lave en overkommelig bil, Tesla afskærer job
- 3 store havzoner