


Oppustelige rumrobotter med integrerede dielektriske elastomertransducere (DET'er)
Kredit:Ashby et al.
Forskere ved Auckland Bioengineering Institute og Technische Universität Dresden har for nylig designet en ny type oppustelig robot til rumnavigation. Disse robotter, præsenteret i et papir offentliggjort i SPIE Digital Library, blev skabt ved hjælp af dielektriske elastomer transducere (DET'er), som hovedsagelig er elektriske kondensatorer lavet af bløde gummiagtige materialer.
"Nuværende rumteknologi er begrænset af dens masse og volumen. Det tager tusindvis af dollars at sende selv et enkelt kilogram i kredsløb, "Joseph Ashby, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Vores forskning sigter mod at erstatte eller forstærke den nuværende teknologi med lettere udskiftninger af smarte materialer kombineret med oppustelige strukturer."
Hvis de er integreret med oppustelige strukturer, DET'er kan hjælpe med udviklingen af bløde og lavmasserobotter, som har høj emballageeffektivitet og er nemme at implementere. Faktisk, DET'er deformeres, når en spænding påføres dem, på grund af Maxwell-spændingen genereret af det elektriske felt.
I modsætning til traditionelle elektriske motorer, disse kondensatorer giver forskere mulighed for at producere en bred vifte af bevægelser og kræfter uden komplekse, tunge gearmekanismer. DET'er kan også bruges som belastningssensorer ved at overvåge deres ændringer i kapacitans, når de strækkes. Det betyder, at de også har en selvsansende fordel uden behov for eksterne overvågningssystemer.
"Da de udelukkende er lavet af bløde materialer, DET-strukturer kan pustes op på samme måde som en ballon, " Ashby forklarede. "Dette betyder, at de kan danne store strukturer, når de installeres, men kan pakkes ind i små rum på forhånd, hvilket gør dem til ideelle kandidater til rumapplikationer, hvor lanceringsmulighederne er volumenbegrænsede."
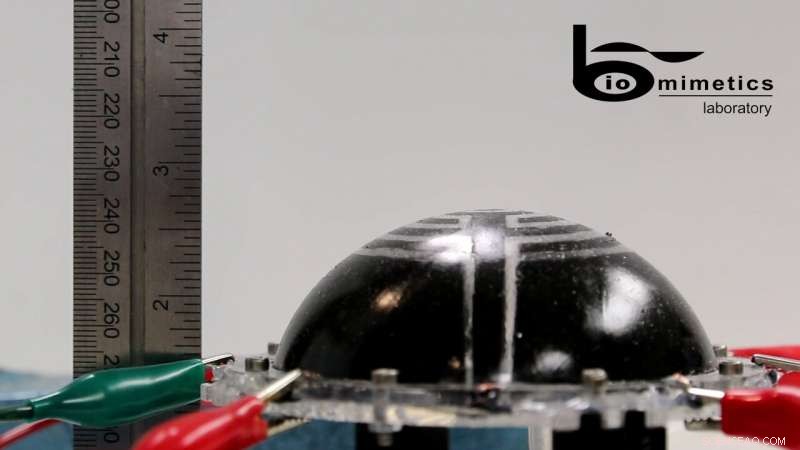
I deres undersøgelse, Ashby og hans kolleger undersøgte bevægelserne opnået ved aktivering af tre eksperimentelle designs. I det første af disse designs, robottens kuppelaktuator er bygget af et ark silikonegummi med segmenterede elektroder.

Kredit:Ashby et al.
Det andet design ligner, men med en forlængelse af kuppelaktuatoren for at frembringe bevægelsesbevægelse fra trinvis aktivering af segmenter. Endelig, den tredje er et rullet cylindrisk design med variationer i sømmens geometri, elektrodeposition og sammensætning, hvilket gjorde det muligt for forskerne at opnå flere resonante og ikke-resonante bevægelser.
"I stor skala, ved at tillade indsættelse af store strukturer, der er i stand til bevægelse og/eller selvstrukturel sundhedsovervågning fra lav masse, løfteraketter med lavt volumen, vi ville være i stand til at udvide vores rumudforskningskapacitet, " sagde Ashby. "På et snævrere fokus, at give mindre satellitter (med stigende popularitet) chancen for at installere og kontrollere antenner eller arrays, der ellers ville være for store i forhold til deres størrelse, ville give dem markant forbedrede kommunikations- og strømfaciliteter."
Ashby og hans kolleger modellerede hvert af deres designs ved hjælp af kommercielt tilgængelig FEM-software og testede dem derefter i simuleringer, mens de gennemgik inflation og aktivering. Selvom deres eksperimenter gav lovende resultater, robotterne er stadig i meget tidlige udviklingsstadier.
For at deres teknologi skal blive et muligt alternativ til nuværende rumaktuatorer, forskerne mangler stadig at overvinde en række centrale udfordringer. For eksempel, driften af DET'er i rummet har indtil videre vist sig at være upraktisk på grund af en række komplekse miljøforhold.
"Vi planlægger nu at fortsætte med at udvikle vores eksisterende prototyper, men udforsk også andre mulige designs til en række forskellige applikationer, Ashby sagde. "Vi arbejder også på at udvikle afskærmningsmetoder til at beskytte vores robotter mod det barske rummiljø."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Honda tilbagekalder 1,2 millioner flere køretøjer med farlige airbagsI denne 14. feb. 2019, Foto, dette billede viser Honda-logoet på et skilt ved Pittsburgh International Auto Show 2019 i Pittsburgh. Honda vil tilbagekalde omkring 1 million ældre køretøjer i USA og Ca
Honda tilbagekalder 1,2 millioner flere køretøjer med farlige airbagsI denne 14. feb. 2019, Foto, dette billede viser Honda-logoet på et skilt ved Pittsburgh International Auto Show 2019 i Pittsburgh. Honda vil tilbagekalde omkring 1 million ældre køretøjer i USA og Ca -
 Biludstilling i Detroit, og industri, forberede overgangenDen første SUV lavet af Rolls-Royce, Rolls-Royce Cullinan, er udstillet i Detroit den 13. januar, 2019 ved en begivenhed, der officielt åbnede North American International Auto Show Bilindustrien
Biludstilling i Detroit, og industri, forberede overgangenDen første SUV lavet af Rolls-Royce, Rolls-Royce Cullinan, er udstillet i Detroit den 13. januar, 2019 ved en begivenhed, der officielt åbnede North American International Auto Show Bilindustrien -
 Projektet leverer billig fremtidig netværksarkitektur til mobiloperatørerFig. 1. Analyse af virkningen af reflektionsmønstre i en realistisk mm-bølge trådløs indstilling (konferencerum). De stiplede linjer viser eksempler på linjeføringsstier samt første og anden ordens
Projektet leverer billig fremtidig netværksarkitektur til mobiloperatørerFig. 1. Analyse af virkningen af reflektionsmønstre i en realistisk mm-bølge trådløs indstilling (konferencerum). De stiplede linjer viser eksempler på linjeføringsstier samt første og anden ordens -
 California AG dropper udfordring til T-Mobile-Sprint-fusionDette foto viser skiltning af en T-Mobile-butik i New York, Mandag, 30. april kl. 2018. Onsdag, 11. marts, 2020, Californiens statsadvokat Xavier Becerra sagde, at staten ikke vil appellere en dommerb
California AG dropper udfordring til T-Mobile-Sprint-fusionDette foto viser skiltning af en T-Mobile-butik i New York, Mandag, 30. april kl. 2018. Onsdag, 11. marts, 2020, Californiens statsadvokat Xavier Becerra sagde, at staten ikke vil appellere en dommerb
- Forskere præsenterer revolutionerende lysemitterende silicium
- Fysiske egenskaber ved bariumsulfat
- Kan sollys omdanne emissioner til nyttige materialer?
- Kan lidenskab gøre bedre lærere og helbrede Indonesiens dårlige indlæringsniveau?
- Hurtig screeningsmaskine kan læse og adskille proteinsekvenser
- Implementerbare menneskelige fordybende virtuelle miljøer?