


En slangerobot styret af biomimetiske CPG'er

Output af det neurale netværk til styring af robotmotorer. Kredit:Blanchard, Aihara &Levi.
I de seneste år, et stigende antal undersøgelser har været rettet mod at udvikle robotter inspireret af naturen, især af visse dyrearter. I en undersøgelse offentliggjort i Atlantis Press 'Journal of Robotics, Netværk og kunstigt liv, et team af forskere ved University of Bordeaux og University of Tokyo har skabt en robot, der ligner en slange i både dens form og bevægelser.
"Hovedformålet med denne forskning var at udvikle en robot til biomedicinske applikationer, især rygmarvsskader, "Timothée Levi, en af forskerne, der gennemførte undersøgelsen, fortalte TechXplore. "Vi vil gerne designe nye neuroproteser, hvor de kunstige neuroner kan erstatte de biologiske. I vores robot, vi brugte en biomimetisk bevægelse ved hjælp af biomimetiske spidsende neurale netværk, som gengiver den samme adfærd, som slanger har i naturen. "
En af de centrale udfordringer ved udvikling af bioinspirerede robotter er effektivt at reproducere bevægelsen af dyret af interesse. Hos dyr, de fleste bevægelser genereres af aktiviteten i centrale mønstergenerering (CPG) netværk.
I det væsentlige, CPG'er er neuronale kredsløb, der, når den er aktiveret, kan producere rytmiske motoriske mønstre (f.eks. gå, vejrtrækning, svømning, osv.) i fravær af sensoriske og tidsrelaterede input. I fortiden, CPG'er og deres virkninger på dyrs bevægelse har været i fokus for et stort antal undersøgelser.
Generelt, forskere, der forsøger at udvikle dyrlignende robotter, replikerer CPG'er ved hjælp af simple neuronmodeller eller oscillatorer, som ikke er biologiske tidsskalaer, og betragtes således som bio-inspirerede systemer frem for bio-mimetiske systemer. Disse modeller, imidlertid, giver kun sinusformede svingninger, og er derfor ude af stand til trofast at gengive en række forskellige dyrs bevægelsesmønstre.
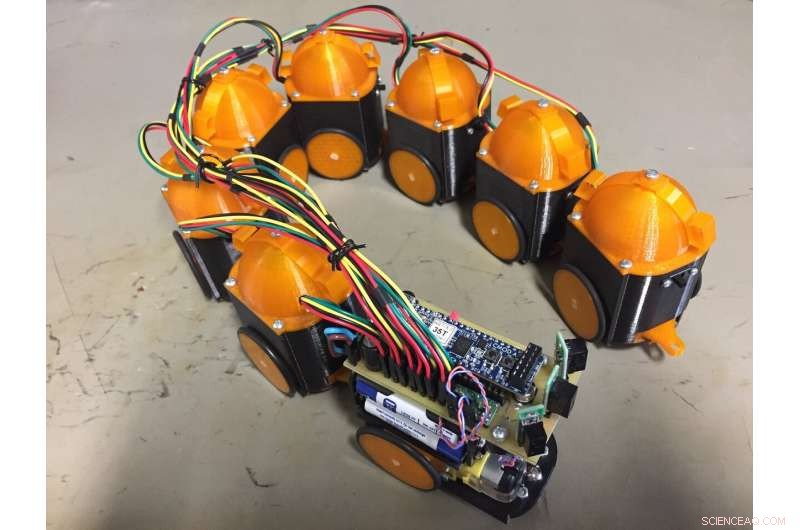
Slangerobotten udviklet af forskerne. Kredit:Blanchard, Aihara &Levi.
I deres undersøgelse, Levi og hans kolleger satte sig for at udvikle biomimetiske CPG'er, der effektivt kan replikere biologisk adfærd, ved hjælp af et digitalt neuromorf system i realtid. Slangerobotten, de udviklede, har to nøglekomponenter, den ene fungerer som dens hjerne og den anden som dens krop.
"Vores slangerobot kan deles i 2 dele, "Forklarede Levi." Den første er dens hjerne, ved hjælp af biomimetiske neurale netværk. Dette neurale netværk er meget tæt på biologi med en biofysisk neuronmodel, synapser og plasticitet. Den anden del er kroppen, som har forskellige "vogne", der modellerer den forskellige del af rygmarven og segmenter af slanger. Signalet skabes af slangehjernen, og det spredes i hele kroppen, der styrer de forskellige motorer. "
Slangerobotten skabt af Levi og hans kolleger styres i realtid af et netværk af biomimetiske CPG'er. Forskerne viste, at deres system kan forbindes til biologiske neuroner og også kan bruges til at simulere forskellige hypoteser eller protokolbehandlinger til biomedicinske applikationer, såsom rygmarvsskader og neuroprostetik.
"Efter min mening, det mest meningsfulde aspekt af vores undersøgelse er, at vi forsøgte at være tro mod biologi og det lykkedes os at integrere det neurale netværk i en lille elektronisk perle, "Sagde Levi." Interessant nok, robotten, vi skabte, arbejder i realtid og har de samme specifikationer som i naturen (bevægelsesperiode, variation, støj, etc.)."
I fremtiden, slangerobotten udviklet af Levi og hans kolleger kunne have en række interessante applikationer inden for robotteknologi og andre områder. For eksempel, det kunne bruges til bedre at forstå krybdyrs adfærd, eller det kunne have flere biohybrid-robotapplikationer.
"Vi planlægger nu at tilføje mere intelligens i robotens hjerne med læringsregler, samt brug af de forskellige sensorer, "Sagde Levi." Desuden, et af vores mål på længere sigt er at kombinere kunstige neuroner og levende neuroner til at skabe en bio-hybrid robot. "
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Uber skifter i bakgear i skuffende Wall Street-debutUbers administrerende direktør Dara Khosrowshahi taler med handlende efter åbningsklokken på New York Stock Exchange, hvor gigantens aktier faldt i deres første handelssession Uber-aktier skred fr
Uber skifter i bakgear i skuffende Wall Street-debutUbers administrerende direktør Dara Khosrowshahi taler med handlende efter åbningsklokken på New York Stock Exchange, hvor gigantens aktier faldt i deres første handelssession Uber-aktier skred fr -
 Tyskland er EUs Eldorado for pengeautomaterOmkring 369 pengeautomater i Tyskland blev sprængt af kriminelle bander sidste år, en stigning på 38 procent i forhold til 2017 Søg efter sort Audi efter forsøg på at sprænge en pengeautomat, Nabo
Tyskland er EUs Eldorado for pengeautomaterOmkring 369 pengeautomater i Tyskland blev sprængt af kriminelle bander sidste år, en stigning på 38 procent i forhold til 2017 Søg efter sort Audi efter forsøg på at sprænge en pengeautomat, Nabo -
 Asparks EV laver 0 til 60 på under 2 sekunderAspark Owl, der indtager centrum i EV nyheder, en elektrisk superbil, der klarer 0-60 på under 2 sekunder (du skal bare vide, at rekorden blev sat på racing slicks). Asparks superbil i høj stil har n
Asparks EV laver 0 til 60 på under 2 sekunderAspark Owl, der indtager centrum i EV nyheder, en elektrisk superbil, der klarer 0-60 på under 2 sekunder (du skal bare vide, at rekorden blev sat på racing slicks). Asparks superbil i høj stil har n -
 Brug af multi-task læring til taleoversættelse med lav latencyKredit:Suan Moo, Unsplash.com Forskere fra Karlsruhe Institute of Technology (KIT), i Tyskland, har for nylig anvendt multi-task maskinlæring til neural taleoversættelse med lav latens. Deres stud
Brug af multi-task læring til taleoversættelse med lav latencyKredit:Suan Moo, Unsplash.com Forskere fra Karlsruhe Institute of Technology (KIT), i Tyskland, har for nylig anvendt multi-task maskinlæring til neural taleoversættelse med lav latens. Deres stud
- Skylder IRS? Intet problem, siger nogle amerikanere
- Høne 3-160 er en symbiotisk binær med Mira variabel stjerne, undersøgelse tyder på
- Billede:Simuleret satellit-rendezvous
- Almindelig fyrværkeri frigiver giftige metaller i luften
- Nanodråber og ultralydsøvelser viser sig at være effektive til at tackle hårde blodpropper
- Forskere 3-D print metamaterialer med nye optiske egenskaber