


En ny metode til at muliggøre robust bevægelse i en firbenet robot

Illustration af robotten brugt af forskerne. Kredit:Nordmoen et al.
En af de vigtigste udfordringer for robotforskning er udviklingen af effektive og modstandsdygtige kontrolsystemer, som giver robotter mulighed for at navigere i en række forskellige miljøer og håndtere uventede hændelser. Forskere ved Universitetet i Oslo har for nylig udviklet en udviklet legemliggjort fasekoordinationsteknik til robust firbenet robotbevægelse. Deres arbejde, offentliggjort på arXiv, var delvist sponsoreret af Norges Forskningsråd.
"Den motiverende faktor for os var observationen af, at nogle robotadfærd, som vi trænede i simulering, ikke fungerede korrekt, når de blev testet på den rigtige robot, " Jørgen Nordmoen, en af forskerne involveret i undersøgelsen, fortalte TechXplore. "Denne observation er en kendt udfordring, ofte kaldet 'realitetskløften' ' og vi ville se, om brug af sensordata kunne hjælpe med at overvinde denne udfordring."
For effektivt at reducere 'virkelighedskløften', der ofte observeres i robotstudier, Nordmoen og hans kolleger ønskede at kombinere centrale mønstergeneratorer (CPG'er) med feedback fra robottens krop og sensorer. CPG'er er en populær metode til at generere rytmiske bølger eller motoriske mønstre i robotter, som kan bruges som fundament for bevægelse. Kunstige CPG'er er inspireret af dyrs rygmarv, som vides at indeholde neuroner, der genererer rytmiske signaler i fravær af sensorisk information.
"CPG'er er relativt ligetil at træne, imidlertid, de inkorporerer ikke i sig selv nogen information om omverdenen, " sagde Nordmoen. "Vores hovedmål var at se, om vi kunne kombinere et komplekst CPG-netværk med indbygget fasekoordinering, og om inkorporeringen af sensordata kunne forbedre, hvordan robotten opførte sig i den virkelige verden."
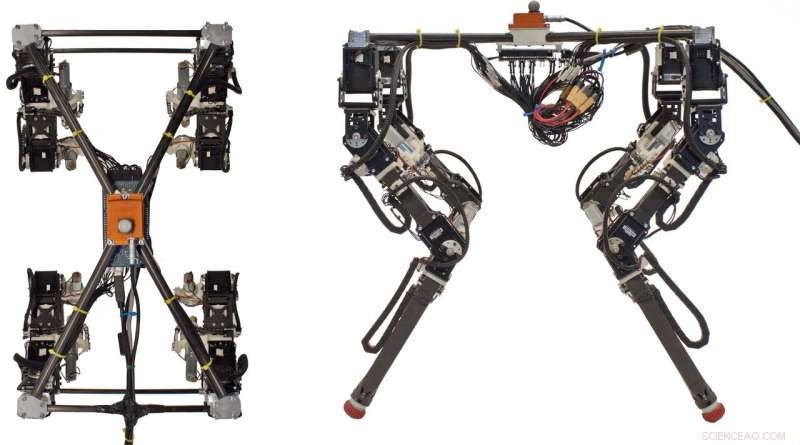
Billeder af robotten brugt af forskerne. Kredit:Nordmoen et al.
Indbyggede fasekoordinationsteknikker fungerer ved at mærke mængden af tryk, som robotten placerer i hver af dens fødder, bruger denne måling til at kontrollere synkroniseringen af dens ben. I deres undersøgelse, forskerne brugte en minimalistisk tilgang kaldet TEGOTAE, som bruger sensorfeedback til emergent fasekobling mellem robottens ben.
Som regel, i robotter med ben, hvert ben er eksplicit koordineret med de andre, betyder, at et ben altid kender den relative position af andre ben. I modsætning, i den indlejrede fase-koordineringstilgang, der er udtænkt af Nordmoen og hans kolleger, hvert ben er afkoblet fra de andre, og kroppen selv håndhæver implicit synkroniseringen mellem benene. Fodtrykssensoren tilføjet af forskerne muliggør implicit synkronisering, i sidste ende forbedre robottens koordination.
"Vores metode bruger en mere kompleks CPG end andre tilgange, ved at bruge legemliggjort fasekoordination og udføre eksperimenterne på en mere kompleks robot, Nordmoen sagde. vi trænede CPG'en ved hjælp af en evolutionær optimeringsalgoritme, som sammen med den legemliggjorte fasekoordination gør det muligt for gangrytmen automatisk at tilpasse sig robotten og omgivelserne."
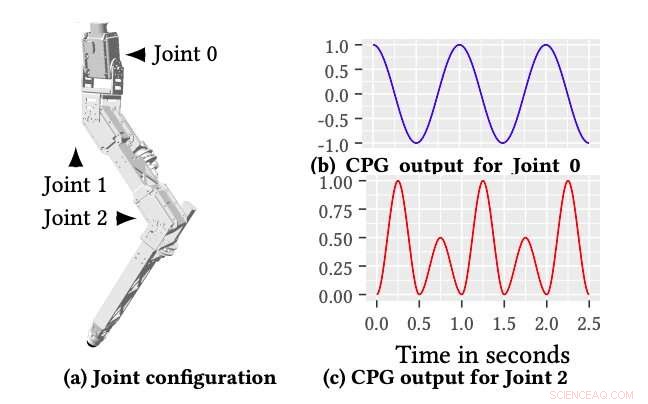
(a) viser en visuel gengivelse af et ben på robotten med led markeret. (b) viser et eksempel på en kontrolkurve for led 0 og led 1, mens (c) viser et eksempel på en kontrolkurve for led 2. Kredit:Nordmoen et al.
I deres undersøgelse, forskerne anvendte deres metode til DyRET, en firbenet robot med pattedyrs morfologi. De trænede først den firbenede robot i simuleringer, og efterfølgende overførte deres tests til den virkelige verden for at verificere, om træningen var effektiv. Dette gav dem mulighed for at evaluere deres teknik, før de anvendte den i virkelige scenarier uden at forårsage skade på robotten.
"Praktisk set, vores arbejde kan føre til robotter med ben, der er bedre til at tilpasse sig deres omgivelser, dermed håndtere forskellige miljøer, " sagde Nordmoen. "Dette inkluderer at lette overførslen af robotcontrollere fra simulering til den virkelige verden. Som vi skrev i avisen, robotter med ben har mulighed for at hjælpe på brugerens præmisser med lidt justering af brugeren, sammenlignet med robotter på hjul."
Teknikken udviklet af Nordmoen og hans kolleger kunne lette udviklingen af robotter med mere robuste bevægelsesevner. I fremtiden, andre forskere kunne integrere tilgangen i deres robotter eller hente inspiration fra denne undersøgelse for at udvikle lignende teknikker. Ifølge Nordmoen, vanskelighederne forbundet med at integrere sensorfeedback i robotter med ben og enkelheden i denne nye indbyggede fasekoordineringstilgang kunne være et godt udgangspunkt for fremtidig forskning.
"Vi arbejder i øjeblikket på bedre at forstå den mekanisme, der ligger til grund for legemliggjort fasekoordinering, " tilføjede han. "Dette vil forhåbentlig give os mulighed for at forbedre konceptet og generere bedre bevægelsesstrategier. Ud over, vi vil gerne se, hvordan den indlejrede fasekoordination påvirkes, hvis selve robotten ændrer sig. Med vores unikke robot, DyRET, vi har evnen til at ændre robottens morfologi og kan teste, hvordan sådanne ændringer ville påvirke vores tilgang."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Hvordan virker en magnetisk modstandscykel?Mennesker over hele verden bruger træningscykler til at komme i form, til at træne og sikre sig, at de forbliver aktive i hele deres liv. Der er to hovedtyper af motionscykler til rådighed, og den mes
Hvordan virker en magnetisk modstandscykel?Mennesker over hele verden bruger træningscykler til at komme i form, til at træne og sikre sig, at de forbliver aktive i hele deres liv. Der er to hovedtyper af motionscykler til rådighed, og den mes -
 Germanys Siemens siger, at man planlægger at afbryde olie- og gasenhedenSiemens ønsker i stigende grad at fokusere på digitale industrier og smart infrastruktur Det tyske industrikonglomerat Siemens sagde tirsdag, at det planlægger at afbryde sin gas- og kraftenhed, d
Germanys Siemens siger, at man planlægger at afbryde olie- og gasenhedenSiemens ønsker i stigende grad at fokusere på digitale industrier og smart infrastruktur Det tyske industrikonglomerat Siemens sagde tirsdag, at det planlægger at afbryde sin gas- og kraftenhed, d -
 Droneobservationer forstyrrer Singapore-flyvninger for anden gangAdskillige flyvninger blev afbrudt i Changi Lufthavn på grund af dårligt vejr og uautoriserede droneaktiviteter Droneobservationer har forstyrret flyvninger i Singapores hovedlufthavn for anden ga
Droneobservationer forstyrrer Singapore-flyvninger for anden gangAdskillige flyvninger blev afbrudt i Changi Lufthavn på grund af dårligt vejr og uautoriserede droneaktiviteter Droneobservationer har forstyrret flyvninger i Singapores hovedlufthavn for anden ga -
 Den pakistanske popcorn -sælger, der byggede sit eget flyMotoren er fra en vejskærer, vingerne er burlap, hjulene er lånt fra en rickshaw:en pakistansk popcorn -sælger har fanget luftvåbnets opmærksomhed ved at bygge sit eget fly Motoren er fra en vejsk
Den pakistanske popcorn -sælger, der byggede sit eget flyMotoren er fra en vejskærer, vingerne er burlap, hjulene er lånt fra en rickshaw:en pakistansk popcorn -sælger har fanget luftvåbnets opmærksomhed ved at bygge sit eget fly Motoren er fra en vejsk
- Takket være skyer, nye klimasimuleringer forudsiger mere opvarmning end forgængere
- Video:Næste generations rumdragtdesign
- Hydraulisk Jack Information
- Eksperter måler de økonomiske konsekvenser af COVID-19-pandemien
- Forskere opdager symmetri-brydende faseovergange efter isotopisk doping
- Sådan beregnes hældningen af regressionslinjen