


Brug af sensorer til at forbedre interaktionen mellem mennesker og robotter, der går sammen

SensFoot-enheden. Kredit:Moschetti et al
Forskere ved BioRobotics Institute of Scuola Superiore Sant "Anna, Co-Robotics srl og Sheffield Hallam University har for nylig foreslået en ny tilgang til at forbedre interaktioner mellem mennesker og robotter, når de går sammen. Deres papir, udgivet i MDPI'er Robotik tidsskrift, foreslår brug af bærbare sensorer som et middel til at forbedre samarbejdet mellem et menneske og en robot, der bevæger sig rundt i et fælles miljø.
De seneste teknologiske fremskridt har gjort det muligt at anvende robotter som assistenter inden for en bred vifte af hverdagssituationer. For at fungere godt i de fleste af disse indstillinger, imidlertid, robotter skal kunne interagere med menneskelige brugere problemfrit og effektivt. Forskere har derfor udviklet tilgange og teknikker til at forbedre robotternes evne til at forstå sociale signaler og reagere i overensstemmelse hermed.
I deres undersøgelse, holdet fokuserede især på opgaver, der involverer mennesker og robotter, der går sammen eller forfølger en opgave, der involverer at stå og bevæge sig rundt i et fælles miljø. Deres mål var at udvikle en tilgang, der tillader mennesker at bevæge sig naturligt i et givet rum sammen med en robot, uden behov for fysiske forbindelser mellem de to.
"Dette papir foreslår brugen af bærbare inertimålenheder (IMU'er) til at forbedre interaktionen mellem menneske og robot, mens man går sammen uden fysiske forbindelser og uden begrænsning på den relative position mellem mennesket og robotten, "skrev forskerne i deres papir.
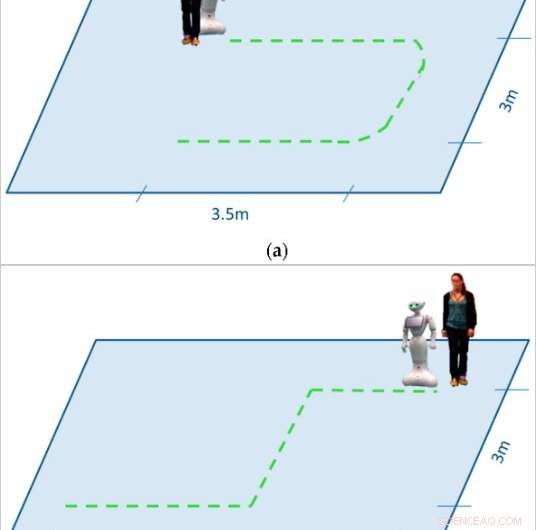
Skema over følgende opgave (a) og følg-mig-opgave (b). Kredit:Moschetti et al.
Den fremgangsmåde, forskerne foreslår, indebærer brug af IMU -sensorer, som er elektroniske enheder, der måler og rapporterer orientering, hastighed og andre data vedrørende bevægelser, typisk ved hjælp af accelerometre, gyroskoper og/eller magnetometre. Disse sensorer bæres af mennesker (f.eks. På deres sko) uden at forårsage dem ubehag, og dermed tillade dem at bevæge sig frit i deres omgivende rum.
IMU'erne indsamler realtidsinformation om den menneskelige brugers bevægelser og gangrelaterede parametre (f.eks. ganghastighed, skridtlængde, orienteringsvinkel, etc.). Efterfølgende, disse data behandles og bruges til at forme robottens bevægelse, i sidste ende skabe et mere naturligt samspil mellem de to midler.
Forskerne byggede et prototype IMU-system kaldet SensFoot og evaluerede dets nøjagtighed og effektivitet i en række eksperimenter, der involverede mennesker og robotter i interaktion med hinanden. De rekrutterede 19 menneskelige deltagere og bad dem udføre to forskellige opgaver, som de omtaler som en "følgende opgave" og en "følg mig" -opgave.
Først, de verificerede nøjagtigheden af deres system ved at sammenligne ganginformationen beregnet af et referencesynssystem med den, der stammer fra data indsamlet af IMU'erne. Efterfølgende, de testede sensorerne i et ægte menneske-robot-interaktionsscenarie.
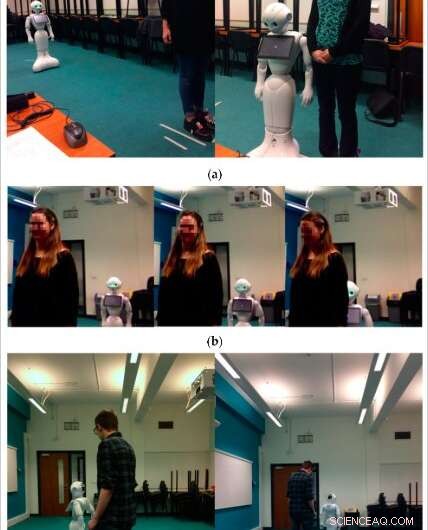
Eksempel på test med brugere (a) og sekvenser fra følgende opgave (b) og følgeopgave (c). Kredit:Moschetti et al.
"Vi eksperimenterede med 19 menneskelige deltagere i to forskellige opgaver, at levere realtidsevalueringer af gangparametre for en mobil robot, der bevæger sig sammen med et menneske, og studerede gennemførligheden og den opfattede brugervenlighed af deltagerne, " skrev forskerne. "Resultaterne viser systemets gennemførlighed, som fik positiv feedback fra brugerne, giver værdifuld information til udviklingen af et naturligt interaktionssystem, hvor robotten opfatter menneskelige bevægelser ved hjælp af bærbare sensorer."
Evalueringerne foretaget af forskerne gav meget lovende resultater, tyder på, at brugen af IMU'er betydeligt kan forbedre interaktioner mellem mennesker og robotter, der bevæger sig rundt i et delt rum. I øvrigt, feedbacken indsamlet fra deltagere, der testede sensorerne, var overvældende positiv. I fremtiden, den tilgang, som forskerne har foreslået, kunne bane vejen for mere adaptive og effektive assisterende robotløsninger, der involverer integration af IMU'er eller andre sensorer med maskinlæringsalgoritmer.
"Fremtidige værker vedrører muligheden for at forbedre systemopfattelsen af den gående bruger, forbedring af nøjagtigheden i udtrukne parametre, og robottens tilpasningsevne, overvinde de nuværende begrænsninger i kontrol og integration, "skrev forskerne.
© 2019 Science X Network
Sidste artikelEn 3D-printer drevet af maskinsyn og kunstig intelligens
Næste artikelRenault vil rejse sag mod Ghosn for udgifter
 Varme artikler
Varme artikler
-
 Maksimere indflydelse i et netværkKredit:CC0 Public Domain At finde måder at maksimere indflydelse på sociale netværk er en betydelig bestræbelse for en bred vifte af mennesker, herunder dem, der er involveret i markedsføring, val
Maksimere indflydelse i et netværkKredit:CC0 Public Domain At finde måder at maksimere indflydelse på sociale netværk er en betydelig bestræbelse for en bred vifte af mennesker, herunder dem, der er involveret i markedsføring, val -
 Smarte byer har til formål at gøre bylivet mere effektivt - men for borgernes skyld er de nødt ti…Kredit:CC0 Public Domain Over hele verden, regeringer, institutioner og virksomheder kombinerer teknologier til at indsamle data, forbedre kommunikation og deling af information, med byinfrastrukt
Smarte byer har til formål at gøre bylivet mere effektivt - men for borgernes skyld er de nødt ti…Kredit:CC0 Public Domain Over hele verden, regeringer, institutioner og virksomheder kombinerer teknologier til at indsamle data, forbedre kommunikation og deling af information, med byinfrastrukt -
 IKEA og Sonos går sammen om SYMFONISK-højttalere og en lampeÅrevis, Sonos Wi-Fi-højttalerne er blevet elsket af musikfans, fordi det er nemt at lytte til streaming musik derhjemme med fantastisk lyd. Også, tilføj muligheden for at tilføje flere højttalere for
IKEA og Sonos går sammen om SYMFONISK-højttalere og en lampeÅrevis, Sonos Wi-Fi-højttalerne er blevet elsket af musikfans, fordi det er nemt at lytte til streaming musik derhjemme med fantastisk lyd. Også, tilføj muligheden for at tilføje flere højttalere for -
 Robot designet til at forsvare fabrikker mod cybertruslerKredit:Georgia Institute of Technology Den er lille nok til at passe ind i en skoæske, alligevel har denne robot på fire hjul en stor mission:at holde fabrikker og andre store faciliteter beskytte
Robot designet til at forsvare fabrikker mod cybertruslerKredit:Georgia Institute of Technology Den er lille nok til at passe ind i en skoæske, alligevel har denne robot på fire hjul en stor mission:at holde fabrikker og andre store faciliteter beskytte
- Hjemløshed et problem for hver tredje fange
- Arktisk issmeltning ændrer havstrømme
- Påvirker tætheden den hastighed, som en væske fryser på?
- Sådan bukker du fladt glas perfekt rundt om hjørner
- Bestemmelse af det effektive magnetiske moment af multicore nanopartikler
- Nordsøens sten kunne fungere som store vedvarende energilagre